Видеообзор STC12 — пульт для управления OSD-меню камеры
Видео Видеообзор STC12 — пульт для управления OSD-меню камеры | www.bezpeka-shop.com канала Владимир П
Показать

Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
Мы больше не будем рекомендовать вам подобный контент.
Отмена
В общем случае пульт дистанционного управления (ПДУ, RCU) — беспроводное или проводное устройство, предназначенное для управления каким-либо механизмом, объектом или процессом на расстоянии. Все устройства ДУ подразделяются на группы:
- по способу получения электропитания: по кабелю, автономное;
- по используемому каналу для передачи управляющих сигналов: ИК, ультразвук, радио, провод, механический привод;
- по функциональности: с одним набором команд, универсальный для нескольких устройств одного производителя, программируемый (обучаемый);
- по мобильности и другим признакам.
Наиболее распространенный в настоящее время вид пультов ДУ — мобильное автономное беспроводное устройство с управлением объектами по инфракрасному каналу (ИК). Именно такой вид устройств ДУ используем в быту, когда передаем управляющие сигналы на телевизор, кондиционер, музыкальный центр, плеер и другую бытовую технику.
В первых моделях пультов присутствовал минимум управляющих элементов только для выполнения основных функций. Со временем подход изменился: современные изделия имеют полный комплект элементов управления, а сами управляемые устройства содержат их ограниченный набор.
Устройство пульта дистанционного управления
Гаджет представляет собой небольшую продолговатую пластиковую коробочку. На лицевой ее части располагаются кнопки, с помощью которых осуществляется выбор управляющей команды.
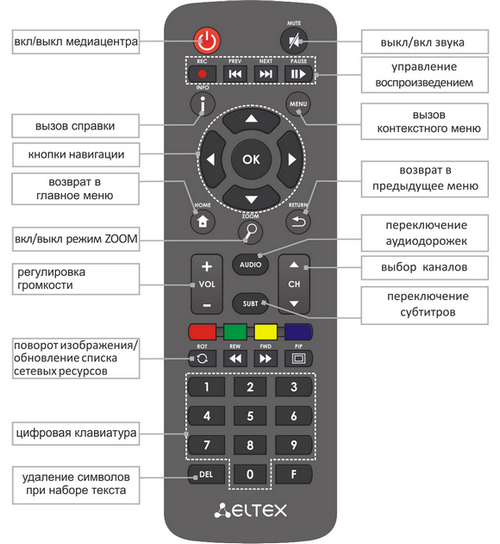
На торце устройства расположено отверстия для линзы ИК-излучателя, который непосредственно и отправляет команду на исполнение. С обратной стороны, под крышкой, располагается ниша для установки элементов питания. Как правило, это две батарейки AAA.

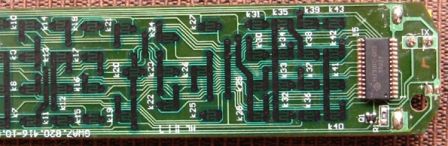
Если разобрать пульт, отсоединив верхнюю его часть от нижней, то мы увидим еще два элемента. Первый — печатная плата с контактными площадками и смонтированной электроникой.
 Второй — выполненная из мягкого эластичного материала накладка с выпуклыми кнопками управления с проводящими дисками.
Второй — выполненная из мягкого эластичного материала накладка с выпуклыми кнопками управления с проводящими дисками.
Инфракрасный беспроводной пульт дистанционного управления: принцип действия
Устройство пульта и работа дистанционного управления основаны на односторонней или двусторонней передаче информации между пультом и объектом управления с помощью лучей света в инфракрасном диапазоне. Для приема и передачи сигналов применяются ИК-приемники и передатчики.
Схему с двусторонним каналом передачи информации имеют пульты, управляющие кондиционерами: на кондиционер отправляется управляющий сигнал, а обратно возвращаются параметры работы агрегата и данные о температуре.

Все остальные модели в подавляющем большинстве случаев одноканальные.
Передача и прием команд
Возьмем операцию, которая наиболее часто встречается в быту: дистанционное беспроводное управление телевизором. Первое, что делает схема пульта, определяет, какая кнопка была нажата. Принцип определения тот же, что и в компьютерной клавиатуре: сканирование матрицы размещенных кнопок. Но, в отличие от клавиатуры ПК, на ПДУ генератор сканирования
находится в режиме ожидания и включается только при нажатии кнопок на пульте. Этим достигается экономное использование элементов питания.
Затем производится кодирование управляющего сигнала (команды) и передача его ИК-светодиодом. Перед передачей основного сигнала производится синхронизация передающего и приемного устройств, также на приемной стороне производится проверка соответствия кода пульта. Сама же передача будет осуществляться в течение всего времени, пока нажата управляющая кнопка.
Следует заметить, что производители электронных устройств ничем не ограничены в создании алгоритмов кодирования управляющих сигналов и используемых частот модуляции. Это приводит к тому, что часто даже однотипные модели одного производителя требуют для управления разные пульты управления.
Схема пульта дистанционного управления
Большинство схем пультов ДУ TV и других бытовых устройств в своей основе имеют основную микросхему
, формирующую сигнал управления после нажатия соответствующей клавиши, усилитель сигнала
и ИК-светодиод
. Разница заключается лишь в наименовании и компоновке радиоэлементов внутри корпуса устройства и на печатной плате.
![]()
Микросхема представляет собой специализированный микроконтроллер, в который в процессе производства записывается программный код. Записанная программа затем уже не изменяется в течение эксплуатации. На плате располагается также кварцевый резонатор
для синхронизации частоты приемника и передатчика. Усилитель сигнала входит в состав микросхемы или выполнен на отдельном элементе.
Для самостоятельного создания такого устройства, кроме радиолюбительских навыков, вам необходимо также уметь создавать программный код для микроконтроллеров.
Пульт ДУ для ПК
Пульт дистанционного управления для персонального компьютера может оказаться полезным при работе с интерфейсом, как самой операционной системы, так и при управлении функционированием различных программ. Например, управление презентациями в Power Point
или воспроизведением медиа-контента в Media Center
. Иногда такие пульты уже входят в комплект ПК.

Производители пультов для ПК, в отличие от TV, реализовали 2 решения: ИК и радиопульты. Дело в том, что устойчиво при управлении в инфракрасном диапазоне взаимодействует с устройством при прямой видимости и на расстоянии до 10 м, что достаточно для TV, но может оказаться неудобным для управления ПК, особенно во время презентаций. Радиопульт увеличивает это расстояние до 30 м независимо от препятствий на пути сигнала.
Внешне радиопульт от ИК будет отличаться только наличием небольшой антенны. Но для того, чтобы можно было осуществлять управление, ПК необходим еще один элемент: приемник радио- или ИК- сигнала, установленный в компьютер или ноутбук. Это может быть, как встроенное устройство, так и модуль, подключаемый к порту USB. Второй вариант предпочтительней.
Универсальный и/или программируемый пульт ДУ
Универсальный пульт дистанционного управления может потребоваться в двух случаях:
- Не найдена замена для утерянного или вышедшего из строя старого пульта управления TV или другой бытовой техники.
- Множество различной бытовой техники в одном помещении делает управление ею с разных пультов чрезвычайно неудобным, так как понятие «правильного дизайна» и «оптимальной эргономичности» у всех производителей свое.
Различают два вида таких устройств: пульты, запоминающие команды (обучающиеся), и программируемые универсальные ПДУ. В первом случае, для ввода нужных кодов используется штатный ПДУ TV или другого устройства. Во втором, список доступных кодов и моделей техники, которыми можно управлять, находится в инструкции к прибору управления. Разница в том, что, несмотря на тысячи моделей устройств, поддерживаемых универсальными пультами, нужного устройства в этом перечне может не оказаться.
«Обучение» запоминающих пультов производится в соответствии с руководством пользователя и с использованием оригинального ПДУ. Если приобретенный пульт имеет на своей передней панели меньшее количество клавиш, чем у «родного», то в первую очередь следует программировать только те, которые необходимы.
После приобретения универсального многофункционального пульта не стоит выбрасывать старые штатные. Во-первых, они могут потребоваться, если новый внезапно выйдет из строя. Во-вторых, на универсальном может не оказаться некоторых нужных элементов. И в-третьих, они могут потребоваться для перепрограммирования в случае сбоя или смены элементов питания.
Смартфон в качестве ПДУ
Еще один вариант ПДУ практически для любого устройства — использование в качестве управляющего устройства смартфона. При этом в нем может быть, а может и не быть реализована передача сигналов в ИК диапазоне (технология IrDA
). В последнем случае управление осуществляется через Bluetooth или Wi-Fi. Единственное ограничение состоит в том, что управляемое устройство должно также поддерживать эти протоколы обмена информацией, что реализовано не на всей технике.
Более интересен в качестве ПДУ вариант смартфона с ИК-портом. Рассмотрим это на примере модели Xiaomi Redmi 3
и довольно старого телевизора Daevoo
. Нам потребуется установить из Google Play
специальное приложение. Оно может быть любым, главное, чтобы в перечне поддерживаемого оборудования присутствовала нужна модель объекта управления. Для этого телефона с оболочкой от MIUI
оно называется Mi Remote
(русский язык присутствует).
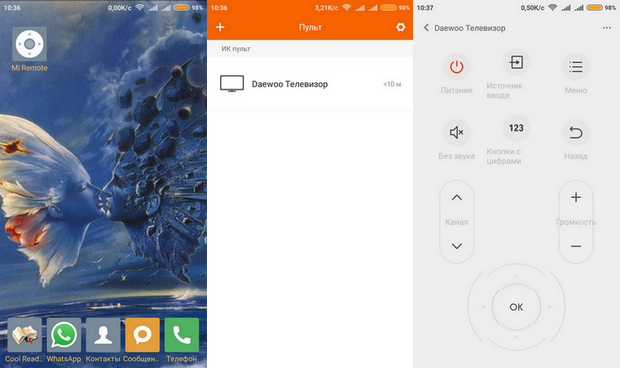
После установки выбирается нужный производитель, и производится полноценное управление TV в полном объеме.
Заключение
Таким образом, мы выяснили, что выход из строя пульта от любой техники — не фатально. Его можно даже не ремонтировать, а просто заменить аналогичным или приобрести универсальный. На крайний случай, временно, можно использовать смартфон.
Помните, как в мультфильме «трое из Простоквашино», мама дяди Федора сказала: «Я так устаю на работе, что даже телевизор смотреть не могу!» Видимо, эта фраза и является ответом на вопрос, почему вся современная бытовая аппаратура имеет инфракрасные пульты дистанционного управления (ПДУ)
. Но, если разобраться, то все началось намного раньше.
ПДУ с проводами
Первыми работами по дистанционному управлению занимались немцы в конце 30-х годов двадцатого столетия, еще до начала Второй мировой войны. Объектом автоматизации был ламповый приемник. Пульт управления представлял собой отдельную металлическую панель с кнопками. Нажатие кнопки приводило к срабатыванию исполнительного механизма, — реле, электромагнита или двигателя. Соединение между таким ПДУ и приемником было выполнено многожильным кабелем, что все равно привязывало слушателя к определенному месту.
Подобные пульты были у советских ламповых телевизоров первого класса. Это была маленькая пластмассовая коробочка с регулятором громкости, соединенная с телевизором проводом. Кроме громкости такой пульт ничем управлять не мог. Но определенные удобства такой пульт, несомненно, создавал. Ведь тогда не было надоедливой рекламы и фильм приходилось смотреть от начала до конца.
Ультразвуковые ПДУ
Первый беспроводной пульт дистанционного управления обязан своим появлением на свет американцу Хассо Платтнеру. В 1972 году после ухода из IBM он организовал свою фирму и в целях налаживания деловых контактов и связей часто и много ездил по всему миру. На одной из встреч с руководством компании JVC произошел конфузный случай.
При обсуждении какой-то проблемы Платтнер встал и двинулся к телевизору, чтобы пальцем показать какую-то деталь на экране. Но, до экрана не дошел, споткнувшись о кабель дистанционного управления. Пролил коктейль на костюм и в сердцах сказал: «Разве нельзя было сделать переключение каналов по радиоволне?», чем вогнал японских компаньонов в краску. А уже ровно через год появился первый пульт на ультразвуковых лучах.
Принцип его действия заключался в подаче своей частоты при нажатии на каждую кнопку. Ультразвук улавливался микрофоном и усиливался усилителем, в которым использовалось несколько параллельных каналов с резонансными контурами. На выходах этих каналов появлялись управляющие напряжения. При таком способе кодирования каналов получалось не очень много.
Дальнейшее развитие электроники, в частности появление микросхем фирмы INTEL, позволило отказаться от подобного многочастотного кодирования. На одной ультразвуковой частоте за счет различных способов модуляции стало возможным передавать намного больше команд, чем при много частотном кодировании. Одним из первых аппаратов оснащенных ультразвуковым ПДУ был телевизор фирмы RCA. Кодирование команд осуществлялось при помощи широтно-импульсной модуляции (ШИМ).
Эти пульты имели целый ряд недостатков. В первую очередь большие габариты и мощность потребления. Это было связано с тем, что ультразвуковое излучение охотно поглощается предметами обихода, — одеждой, мягкой мебелью, коврами. Поэтому мощность излучения требовалось увеличивать, что сокращало срок службы батарей.

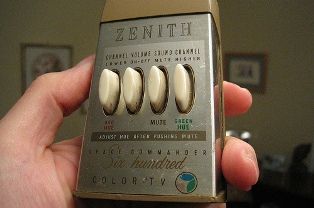

Рис. 1. Первые пульты дистанционного управления
Специализированные микросхемы для ПДУ
Дело пошло лучше после того, как фирма INTEL разработала свой первый микропроцессор 8080. Эту новую разработку взяли за основу фирмы GRUNDIG и MAGNAVOX, которые сделали первый специализированный микропроцессор. В этом случае процессором генерируется нужный код цифровой команды под воздействием нажатой кнопки. Таким образом специализированная микросхема для ПДУ есть не что иное, как с уже прошитой программой. Такие ПДУ назывались TELEPILOT.
ПДУ на ИК-лучах
Первый цветной телевизор с микропроцессорным управлением и пультом дистанционного управления (ПДУ) на ИК лучах был выпущен совместно фирмами GRUNDIG и MAGNAVOX уже в 1974 году. Уже в этой модели в углу экрана показывался номер переключающегося канала (система OSD). Эта система команд получила название ITT. Это был первенец фирмы GRUNDIG.
В дальнейшем исследованиями в области ПДУ занялась фирма PHILIPS, которая разработала систему команд RC-5. Новая система позволяла кодировать 2048 команд, что в 4 раза превысило количество команд в системе ITT. Несущая частота была выбрана 36КГц, что не мешало передачам европейских радиовещательных станций и работе пультов с ультразвуковыми передатчиками с частотой 30 и 40КГц, а также обеспечивала достаточную дальность приема.
Но электронная техника не стояла на месте, а как говорил один киногерой, — шла вперед семимильными шагами. Совершенствовались телевизоры, появились видеомагнитофоны и музыкальные центры, спутниковые тюнеры, проигрыватели CD и DVD и многое другое.
Для управления новой техникой потребовались и новые ПДУ, а соответственно пришлось разрабатывать новые микросхемы. Такие микросхемы разработали фирмы SIEMENS и THOMSON. Несущая частота новых ПДУ была тоже 36КГц, но использовался другой метод модуляции сигнала, — двухфазная модуляция. При такой модуляции несущая частота была более стабильна, что обеспечило повышение дальности, увеличение помехозащищенности и надежности работы.
Дальнейший вклад в дело развития систем ПДУ снова внесла фирма PHILIPS. В начале 90 годов прошлого века она объединила все лучшее, что было в системах RC-5 и SIEMENS. Получившийся продукт получил название «Объединенная система команд». Суть ее в следующем. ПДУ такой системы имеют функции «MENU 1» и «MENU 2». В каждой из этих функций одна и та же кнопка выполняет разные команды, и получается, что меньшим количеством кнопок можно выполнить большее число команд.
Впоследствии пульты управления проникли во многие другие области бытовой техники. ИК излучением в настоящее время управляются кондиционеры, вентиляторы, настенные тепловентиляторы, . Даже некоторые модели автомагнитол и цифровых фотоаппаратов имеют ПДУ.
При всем многообразии пультов и управляемых ими устройств, все они работают практически одинаково: инфракрасный светодиод ПДУ при нажатии кнопок излучает пачки инфракрасных импульсов (вспышек), которые принимаются фотоприемником («глазом») телевизора или другого устройства. Современный интегральный фотоприемник представляет собой устройство достаточно сложное, хотя по внешнему его виду этого не скажешь. Внешний вид фотоприемника показан на рисунке 2.
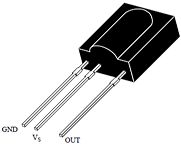
Рисунок 2. Фотоприемник
Приемник настроен на прием импульсов с несущей частотой 36КГц, что соответствует протоколу RC-5. Если вблизи фотоприемника просто включить, например, от батарейки, ИК светодиод, то его немигающее свечение на «глаз» никакого воздействия не окажет, даже если этот светодиод поднести вплотную к фотоприемнику. Также не оказывает воздействия дневной и искусственный свет. Такая избирательность обусловлена тем, что в цепи усиления сигнала фотоприемника имеется полосовой фильтр. Структурная схема фотоприемника показана на рисунке 3.
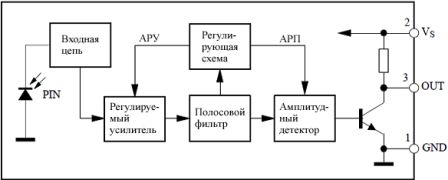
Рисунок 3. Структурная схема фотоприемника
Здесь не будет объясняться подробно протокол RC-5, поскольку на дальнейший рассказ, да собственно и на ремонт ПДУ, это незнание никак не повлияет. Желающие познакомиться с протоколом RC-5 более подробно могут найти его описание в интернете. Это уже тема для отдельной статьи.
Устройство ПДУ
При всем многообразии современных ПДУ все модели устроены практически одинаково. Основное различие чаще всего во внешнем виде, в дизайне устройства. Как было сказано в первой части статьи, основой современного ПДУ является специализированный микроконтроллер. Программа в МК записывается в процессе изготовления на заводе и в дальнейшем изменена быть не может. При включении в схему для такого МК требуется минимальное количество навесных деталей. Схема современного ПДУ показана на рисунке 4.
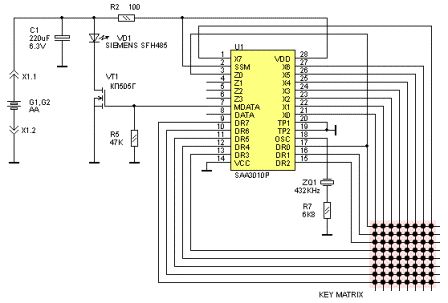
Рисунок 4. Схема современного пульта дистанционного управления
Основой всего устройства является микросхема U1типа SAA3010P. Хотя буквы могут быть и другими, что говорит о другой фирме производителе микросхемы. Но цифры все равно остаются 3010.
Как было сказано выше, навесных деталей практически нет. Прежде всего, это , хотя это не совсем точно. Его назначение — синхронизация внутреннего генератора микросхемы, что обеспечивает требуемые временные характеристики выходного сигнала.
В нижнем правом углу схемы показана матрица клавиш (KEY MATRIX). Ее строки подсоединены к выводам DR0…DR7, а столбцы, соответственно, к выводам X0…X7. При нажатии на любую кнопку замыкается одна пара столбец — строка, и на выходе микросхемы возникает импульсная последовательность соответствующая нажатой кнопке. Каждая кнопка выдает свою последовательность и никакую другую! Всего возможно подключить 8*8=64 кнопки, хотя практически может быть и меньше.
Выходной сигнал в виде импульсов напряжения поступает на затвор полевого транзистора VT1, который в свою очередь управляет работой ИК светодиода VD1. Алгоритм управления в данном случае очень простой: открылся транзистор — засветился светодиод, транзистор закрыт, — светодиод погас. В таком случае говорят, что транзистор работает в ключевом режиме. В результате таких вспышек формируются пакеты импульсов, соответствующие протоколу управления RC-5.
Питание схемы производится от двух гальванических элементов типа AA, энергии которых хватает не менее чем на год. Параллельно батарейкам стоит электролитический конденсатор C1, который шунтируя внутренне сопротивление батареек, продлевает срок их службы и обеспечивает нормальную работу ПДУ при несколько «подсевших» батарейках. Светодиод в импульсном режиме может потреблять ток до 1А.
После рассмотрения схемы ПДУ, кажется, можно сказать, что ломаться при таком простом устройстве абсолютно нечему, но это не так. Именно ПДУ чаще всего доставляет неприятности владельцу телевизора. О том, как отремонтировать ПДУ, какие его основные «болезни», а также, чем и как их вылечить будет рассказано во второй части статьи.
На рис. 2.1 показана схема пульта дистанционного управления TNQE007 современного цифрового телевизора фирмы PANASONIC.
Подобные схемы можно найти в пультах телевизоров, видеомагнитофонов и т. д. Основными элементами пульта ДУ являются
клавиатурная матрица, микросхема контроллера клавиатуры, выходной транзисторный каскад, излучающий инфракрасный диод (или
несколько диодов) и батарея автономного питания.
Для передачи команд используется модулированный сигнал инфракрасного излучения. Цифровой код, характеризующий выбранную
нажатием соответствующей клавиши функцию, посылается пультом в виде серии «вспышек». Каждая «вспышка» содержит
последовательность коротких импульсов. Цифровой код о выбранной команде формируется длительностью промежутка между
«вспышками». В данном случае длительность промежутка измеряется между передними фронтами двух соседних «вспышек».
Логическому «0» соответствует промежуток 2 мс, а логической «I» — 4 мс.
Функция 1C 1001 заключается в том, чтобы вырабатывать сигнал сканирования клавиатуры, расшифровывать информацию о нажатых
кнопках и выдавать с 20 вывода цифровой код, соответствующий выбранной функции. Работа 1C 1001 определяется кварцевым
тактовым генератором XI 001.
Выходной сигнал D 1001+D1002+D 1003 представляет собой последовательность пачек импульсов ИК-излучения, промежутки между
которыми определяются передаваемым кодом. Следует отметить, что обычно у схем пультов ДУ опорная частота передатчика
составляет около 250 кГц, а мало распространенная — около 450 кГц. Частоту изменяют, чтобы работа пульта ДУ не создавала
помехи работе других узлов телевизора.
2.2. Поиск неисправностей в пультах ДУ
Перед тем как приступать к устранению неисправности в системе ДУ, необходимо определить, что все дело в пульте ДУ. Проще
всего дело обстоит с пультами ДУ, в которых есть индикаторный светодиод, по работе которого можно судить об исправности
пульта ДУ. К сожалению далеко, не во всех пультах есть такой индикатор. Быстро и надежно можно предварительно проверить
работу пульта ДУ с помощью видеокамеры, в видоискатель которой можно наблюдать наличие вспышек инфракрасного излучения.
Желательно также проверить, не залипла ли в нажатом положении кнопка управления на панели управления телевизора — в этом
случае дистанционное управление блокируется. О неисправности пульта ДУ, как правило, свидетельствует также невозможность
выполнения какой-либо одной или нескольких функций и уменьшение расстояния, с которого можно управлять телевизором.
Если Вы точно выяснили, что неисправен пульт ДУ, а не приемная часть системы, то для начала следует поставить заведомо
исправную батарейку. Если работа дистанционного управления не восстановилась, не следует долго держать новую батарейку
подключенной к схеме пульта, так как из-за возможного короткого замыкания в схеме она может быстро выйти из строя.
Рис. 2.1. Схема пульта ДУ телевизора PANASONIC TX-32WG25C
Поиск неисправности в схеме пульта ДУ (рис. 2.1) можно выполнять в следующей последовательности.
Измерение 1
Подключите к схеме пульта заведомо исправную батарейку и проверьте уровень напряжения питания на 22 выводе 1C 1001.
Отсутствие или сильное падение уровня питающего напряжения на этом выводе свидетельствуют о вероятном выходе из строя
микросхемы контроллера 1C 1001 или сглаживающего электролитического конденсатора С 1001. Вполне вероятен плохой контакт в
батарейном отсеке. Если напряжение питания соответствует номинальному, то
Измерение 2
Проконтролируйте уровень напряжения питания на том же 22 выводе контроллера 1C 1001, нажимая при этом какую-нибудь клавишу
панели пульта (либо закорачивая соответствующие контакты на печатной плате). При отсутствии даже малого изменения напряжения
можно говорить о неработоспособности схемы (вероятнее всего обрыв в излучающем диоде). В данной конкретной схеме пульта
обрыв одного из диодов будет малозаметен, нежели в пультах, где используется два, а тем более один излучающий диод. Такой
эффект возникает также при плохом контакте в клавиатуре, поэтому, если напряжение питания не меняет величины при замыкании
контактов одной клавиши, следует провести проверку, замыкая контакты других клавиш.
Если при нажатии клавиши напряжение питания сильно падает, то вероятнее всего требует замены микросхема контроллера
IC1001.
Если при нажатии клавиши напряжение питания падает незначительно, то можно выполнить
Измерение 3
Замыкая контакты любой клавиши, следует проверить наличие выходного сигнала контроллера в контрольной точке ТР4. Определить
какой при этом передается цифровой код невозможно, да и не имеет смысла, однако само наличие импульсов обычно свидетельствует
об исправности 1C 1001. В случае же отсутствия сигнала в КТ ТР4 следует провести
Измерение 4
С помощью осциллографа следует проверить работу кварцевого генератора микросхемы контроллера. Отсутствие колебаний в КТ ТР2
и КТ ТРЗ является признаком неработоспособности контроллера или кварцевого резонатора XI 001. Разумнее, конечно, сначала
заменить резонатор и только после отрицательного результата такой замены — 1C 1001. В данной схеме полезно будет проверить
и исправность С1003. Убедившись, таким образом, в исправности контроллера IC1001, можно выполнить
Измерение 5
Необходимо с помощью осциллографа убедиться в наличии сигнала на базе и коллекторе выходного транзистора Q1001. По
результатам этих измерений можно сделать вывод о его исправности.
Если вышеперечисленные проверки не принесли положительного результата, то, что маловероятно, микросхема контроллера
клавиатуры выдает неправильные цифровые коды или, что более вероятно, имеется обрыв в дорожке печатной платы от коллектора
выходного транзистора до излучающего диода.
Рис. 2.2. Схема приемной части ДУ 14-дюймового телевизора SONY со схемой OSD
2.3. Поиск неисправностей в приемниках ДУ
Современные преобразователи инфракрасного излучения в электрические сигналы, используемые в телевизорах и других аппаратах
с дистанционным управлением, представляют собой ЧИП, в корпусе которого расположены детектор ИК-излучения и усилитель-
формирователь, имеющий, как правило, три вывода: «питание», «выход» и «общий». В качестве примера на рис. 2.2 показан
приемник ДУ телевизора SONY. Как видно из рисунка сигнал с приемника ДУ непосредственно поступает на обработку в управляющий
процессор 1C 103.
Проверка приемника ДУ (иногда его называют головным усилителем) не вызывает затруднений. Следует лишь убедиться в наличии
напряжения питания и выходного сигнала. Напомним, что этот сигнал представляет собой поток последовательных данных, и с
помощью осциллографа невозможно установить достоверность передаваемого цифрового кода. Однако, если сигнал есть, то можно
предположить, что передаваемый код правильный и сбои в работе системы ДУ связаны с неправильной работой схемы управления и
контроля. При отсутствии выходного сигнала перед заменой ЧИПа обязательно надо проверить работу приемника ДУ, отсоединив его
выход от схемы телевизора. Существует, хоть и редко вероятность того, что «закорочен» соответствующий вход управляющего
микропроцессора.
Хотим также отметить, что косвенным признаком отказа приемника ДУ, при заведомо исправном пульте ДУ, является безупречное
управление соответствующими функциями с передней панели управления телевизора.
2.4. Вывод служебной информации на экран телевизора
В этом разделе мы рассмотрим схемы, обеспечивающие вывод различной служебной информации на экран телевизора, т. и. схемы OSD
(On Screen Display). Данные схемы обеспечивают функции, позволяющие осуществлять с помощью различной информации, выводимой
на экран телевизора, всевозможные настройки в телевизоре. Следует заметить, что если раньше в обычных массовых телевизорах
с помощью сигналов OSD на экран телевизора вызывались, как правило, лишь меню настройки каналов и данные оперативных
регулировок, таких как громкости, яркости, контрастности, насыщенности, таймера выключения (SLEEP), блокировки аудиоканала
(MUTE) и т. д., то в современных телевизорах с помощью различных экранных меню можно проводить не только оперативные
настройки, но и выполнить автоматическое тестирование узлов и схем телевизора, вызвать различные служебные режимы и работать
в них (например, в режиме заводской регулировки можно выполнить первичную настройку телевизора), вывести на экран текущий
календарь, время и т. д.
2.4.1. Основные принципы работы OSD
Как уже было сказано, все современные телевизоры имеют те или иные схемы OSD. Во многих моделях телевизоров различных фирм
сигналы OSD вырабатываются знакогенератором, расположенном непосредственно в центральном управляющем микропроцессоре, по
командам с пульта ДУ или передней панели телевизора. Синхронизация этих сигналов осуществляется строчными и кадровыми
синхроимпульсами, подаваемыми на центральный микропроцессор.
В схемах OSD также часто используется отдельная микросхема знакогенератора, с помощью которой вырабатывается такая
последовательность видеоимпульсов, которая после смешивания с основным видеосигналом приводит к высвечиванию на экране того
или иного символа — числового, буквенного или графического. Эта микросхема получает синхросигнал из того же источника, что и
генераторы разверток, поэтому символы появляются на экране неподвижными и в строго определенном месте.
У некоторых OSD схем есть возможность управления положением (позиционирования) символов на экране. Микропроцессор
определяет, какие символы должны быть выведены, а сам он, в свою очередь, получает команды от кнопок управления или от
пульта ДУ. Некоторые из этих команд в виде подпрограмм «зашиты» в ПЗУ микропроцессора.
2.4.2. Типичные OSD схемы
На рис. 2.3. приведена схема OSD 21-дюймового телевизора SONY с использованием отдельной микросхемы знакогенератора 1C 102.
Обратим внимание, что схема OSD, показанная на этом рисунке, практически не отличается от приведенной на рис. 2.2, где
знакогенератором служит IC104.

Рис. 2.3. Схема OSD 21-дюймового телевизора SONY
Несмотря на то что функции OSD выполняет 1C 102, управляется она центральным микропроцессором 1C 101 по линиям CLOCK (7
вывод), DATA (5 вывод) и CS (14 вывод). Синхронизация сигнала OSD осуществляется в 1C 102 с использованием кадровых и
строчных синхроимпульсов, привязанных к началу кадровых и строчных гасящих интервалов и сформированных из импульсов
обратного хода кадровой и строчной разверток телевизора.
Тактовые сигналы для 1C 102 формируются внутри, а частота их определяется номиналами емкостей и индуктивностей,
присоединенных к 1 и 13 выводам 1C 102. Заметьте, что L102 поддается настройке, чтобы можно было менять частоту
синхросигнала на 13 выводе 1C 102. Таким образом можно устанавливать положение выводимых символов OSD на экране кинескопа.
Биты данных для IC102 поступают из процессора IC101. Они последовательно передаются на 15 вывод IC102 и синхронизируются
сигналом на 16 выводе. Прием данных дисплейным процессором IC102 производится только при наличии низкого логического уровня
на 14 выводе CS.
Сигнал, вырабатываемый в IC102 в соответствии с данными, поступившими из IC101, подается на «зеленый» катод кинескопа с 6
вывода ИС104, через буфер Q104 на видеопроцессор. В результате, все OSD символы, цифры и т. д. получаются на экране ярко-
зеленого цвета. (Заметим, что существует большое число схем OSD, где для отображения служебной информации используются
сигналы и остальных основных цветов — красного (R) и синего (В)).
При переходе с канала на канал центральный микропроцессор 1C 101 вырабатывает на своем 24 выводе положительный
бланкирующий импульс. Бланкирующий импульс приглушает звук, блокирует выходной сигнал с видеопроцессора. Бланкирующий
импульс подается также на 17 вывод 1C 102, убирая OSD сигналы с «зеленого» катода кинескопа.
Внутренняя тактовая частота 1C 102 синхронизуется кадровыми и строчными импульсами, поступающими на 18 и 20 выводы 1C 102.
Всем мозгочинам
, мозгопривет! С давних пор человек мечтает о полете, свободном парении в небе, но пока это не достижимо, хотя…попробуем это немного исправить и сделаем своими руками
простой квадрокоптер.
KK2.1
Это, наверное, первое, что вы найдете при поиске контроллера полета в Интернете. Он основан на AVR микроконтроллере, имеет ЖК-дисплей, который позволяет запрограммировать его без подключения к ПК, а также MPU6050 в качестве датчика. Запрограммировать его можно с помощью собственной прошивки, но для этого понадобится ISP программатор AVR, так как он не имеет выходов на плате. Еще он дешев, требует ручной настройки и прекрасно подходит для опытных пилотов.
KKMulticontroller
Это что-то уникальное в линейке контроллеров! В его основе Atmel AVR (168p), что хорошо, вот только думаю контроллер больше не поддерживается, так как их сайт закрыт. Возможно они перешли на 32-битные квадрокоптеры или что-то еще. Сам контроллер устарел, использует Murata Gyros для ориентации положения в пространстве, датчики не взаимосвязаны, гироскоп аналоговый, для настройки используются навески на стрелы, то есть все просто, но старо…
Для своей мозгоподелки
я взял OpenPilot CC3D из-за простоты его настройки.
Шаг 7: Пульт управления
Управляется самоделка
, естественно, беспроводным пультом управления. Их выбор достаточно большой, от дорогих — Futaba, Spektrum, до дешевых — Turnigy и Flysky.
Количество каналов пульта означает количество передаваемых сигналов управления, нам нужно как минимум 4 канала:
Дроссель
Yaw (вращение относительно оси Z)
Pitch (вращение относительно оси Y – ось проходящая через левую и правую стороны)
Roll (вращение относительно оси X — ось проходящая через перед и зад коптера)
В дальнейшем, для использования на квадрокоптере-самоделке
видеокамеры понадобятся еще каналы, поэтому я выбрал 6-ти канальный Flysky. Это дешевый пульт, но для полетов большой дальности он не подходит. Итак, по своим бюджетным возможностям выбираем пульт для поделки
.
Шаг 8: Монтаж контроллера полета

Пульт и контроллер полета выбраны, осталось закрепить этот контроллер на раме квадрокоптера, добавить батарею и приступить к калибровке мозгоподелки
. Сверху рамы крепим контроллер на хомуты-стяжки, при этом стрелка на контроллере расположена по оси X. Еще момент, для гашения вибраций моторов между рамой и контроллером помещаем обычную губку.
Шаг 9: Подключение и настройка электроники
По инструкциям подключаем контроллер полета, регулятор скорости и пульт управления. И поможет вам в этом следующее видео:
А если у вас пульт Flysky, то и это видео:
Шаг 10: Тестирование
Прежде чем приступить к первому полету, нужно протестировать все компоненты, используя систему контроля OpenPilot GCS. Она имеет дисплей, с помощью которого удобно тестировать датчики и остальные компоненты. Итак, снимаем пропеллеры и с пульта проверяем функционирование всех частей самоделки
.
Я еще проверил диапазон пульта размещая квадрокоптер рядом и на значительном расстоянии. А правильное функционирование пропеллеров можно узнать по характерному звуку при их вращении.
Шаг 11: И наконец: полет
Квадрокоптер, в принципе, опасное устройство, которое при неправильном использовании может нанести серьезный ущерб, поэтому будьте осторожны и ответственны при работе с ним!
К низу рамы подвешиваем батарею, подключаем ее и располагаем поделку
на открытом месте. Затем с безопасного расстояния от квадрокоптера начинаем постепенный запуск мозгоподелк
и. Если вы чувствуете, что поделка
при подъеме сваливается, плывет в сторону, то откорректируйте это навесками на соответствующие стрелы. Добившись стабильного подъема, проверьте, как квадрокоптер реагирует на команды пульта, и настраивая значения PID, получите желаемый отклик.
А теперь поздравляю, в с нуля создали своими руками собственный квадрокоптер!
Желание иметь собственный квадрокоптер, вполне понятно, ведь сегодня время, когда мир переживает настоящий бум. Стоимость «хорошего» дрона, оборудованного камерой большого разрешения для ведения видеосъемки, «по карману» не всем.
{ ArticleToC: enabled=yes }
Но, выход есть – квадрокоптер своими руками. Пошаговая сборка кажется сложной только на первый взгляд.
Весь этап изготовления своими руками состоит из:
- сборки рамы;
- закупки необходимых запчастей;
- сборки;
- проведению проводки.
- Изготовление рамы
Ее можно сделать своими руками из фанеры размером 150х150 мм или алюминиевого профиля размером 14х14 мм. Винтами прикручивают по диагонали лучи, длина которых равна 300 мм. Отверстия для моторов можно просверлить уже после того, как квадрокоптер будет собран.
Для посадочных «лыж» подойдет тонкая лента из алюминия. Ее можно выбрать и для изготовления держателя аккумуляторной батареи.

Необходимые запчасти
- аккумулятор для дрона – 8 шт.;
- батарея для аппаратуры;
- зарядка – 1;
- пропеллеры на 10 дюймов;
- плата управления (HK multi-rotor control board 2.1);
- аппаратура Turnigy 9x.
Все вместе обойдет вам примерно в 120 долларов. Но, ждать посылку из Гонконга придется около 20 дней. Плюс к этому 5 дней, пока можно получить импорт. К указанной сумме добавить нужно 3-15 баксов за доставку.
Нужно максимально точно по центру платформы разместить плату управления. Отверстия для нее просверливают через лучи и фанеру. Плата к лучам крепится с помощью саморезов по металлу.
С платой рядом приклеивают приемник, применив сумермегаклей. Им же можно клеить к лучам антенну. Если назначение каналов у него и платы совпадают, их допускается трехжильными шлейфами.

Следующий шаг сборки квадрокоптера своими руками – сверление отверстий для мотора. На лучи нужно на одинаковом расстоянии, взятом в «на глаз», нанести отметку. Двигатель подойдет с расстоянием между центрами отверстий равным 19 мм и внутренней обычной резьбой М3.
Для вала мотора, нужно просверлить отверстие. Рекомендуется его делать сквозным и на всю ширину квадрата, чтобы за края подставки не цепляться:

Прикручиваем выводами моторы к платформе, пользуясь винтами М3 длиной не больше 4 мм, поскольку такой размер имеет профиль. Делают это, чтобы не испортить обмотку, не способствовать межвитковому замыканию в случае повреждения лака на проводе.
Проводка
Теперь пришло время перейти к проводке. Из четырех регуляторов скорости нужно спаять «паука», припаяв провода прямо в гнезда переходников.

Используются разъемные соединения в единственном месте – при соединении «паука» с батареей. Все остальные соединения паяют и затягивают в шнур термоусадочный, чтобы во время вибрации провода не выпали.
Согласно номерам моторов на плате, подключаем сигнальные провода драйверов. Если используется «плюсовая» схема полета, подключать их нужно к штырям М1-М4 (когда научитесь управлять, прошивку можно изменить).
Схема подключения приводится ниже:

В результате получится такой квадрокоптер, сделанный своими руками, весом один килограмм. Можно проводить тестовый полет.

Но, прежде, необходимо зарядить батарею, подключить ее и передатчик. Теперь время нажать вправо и вниз ручку газа. На плате должен загореться красным цветом СИД. Следующий момент – ручка газа передвинута вперед. Двигатели должны заработать, а квадрокопрет «отправиться» в полет.
Это был простой квадрокоптер своими руками. Если же нужно квадрокоптер собрать самому, да еще с камерой, отличался бы который неплохой производительностью и хорошими летными качествами, есть другой вариант. Сборка зависит от конкретной модели, особенностей электроники и числом элементов конструкции.

Детали для дрона своими руками с камерой
К ним относятся:
- двигатель D2822/14 – 4 шт.;
- регулятор оборота – столько же;
- роторы вращения – левые и правые;
- силовой разветвитель, или разъем на 3,5 мм для подключения регуляторов оборотов.
Не обойтись без платы для регулировки квадрокоптера своими руками, подключаемой к компьютеру через USB — MultiWii ATmega32U4. Чтобы запуск состоялся нужны аккумуляторы Nano Tech 2200 30C – 4 штуки, поскольку при использовании одного накопителя время полета будет небольшим.
Для восстановления энергии в них необходима зарядка. Также потребуется для сборки своими руками контроллер, с помощью которого осуществляется регулировка полетом. Для пульта подойдет устройство Turnigy 9x. Улавливать сигналы с его помощью можно на расстоянии 800-900 метров. Передатчик сигнала идет в комплекте с пультом.
Сборка
Как и в первом случае, она начинается с изготовления рамы, для которой взять можно пластиковые трубы. Поскольку вес их небольшой, квадрокоптер будет мобильным, а развиваемая им скорость высокой. К тому же, такой каркас легко починить в случае «аварии».
К углам прямоугольного каркаса крепятся роторы. Конструкцию необходимо оснастить «ногами», к которым прикрепить камеру.
Силиконовые провода помогут подсоединить двигатели к каждому пропеллеру. Аккумулятор с электроникой неплохо закрепить на платформе, установленной в центре рамы. Прежде, чем приступить к монтажу электронной начинки, следует скачать схему подключения, найти которую несложно на форумах. Если нужно, ДУ можно перепрошить с учетом последних обновлений. Там же, на форумах, рассказывают, как перепрошить пульт.

Собрать квадрокоптер своими руками по силам не каждому, поскольку он требует инженерных навыков. Но, если имеется инструкция и схема, процесс по созданию летающего девайся упрощается.
Пошаговая сборка
Люди, желающие собрать своими руками квадрокоптер, стремятся сэкономить, что вполне понятно. Но причина эта не единственная: многих вопрос интересует потому, что их хобби по управлению беспилотником переросло в желание участвовать в гонках и по возможности стать в них победителем. А для этого необходима доработка конструкции.

Сборка из комплекта
Обзаводясь соответствующим комплектом, можно значительно упростить процесс сборки своими руками ЛА.
Стоит он дешевле готового квадрокоптера в разы, поскольку заниматься сборкой, прошивкой, калибровкой и точной настройкой будет пользователь. Основным достоинством комплектов является отсутствие необходимости подбирать чипы, мощность двигателей, вес корпуса.
О сбалансированности, влияющей на поведение квадрокоптера в полете, тоже не стоит беспокоиться – всеми необходимыми параметрами, в том числе запланированной скоростью и временем нахождения в полете он обладать будет.
Комплекты позволяют собирать разборные и монолитные дроны своими руками. Тут решать пилоту, какую он желает иметь конструкцию. Разборными интересуются те, кто предпочитает модели габаритные, но и одновременно легко переносимые.
Но, для заметки:
такие модели не отличаются привлекательным дизайном, поскольку внешнего корпуса, выполняющего декоративную и защитную функцию, в комплекте нет.
Как собрать подобную конструкцию своими руками, подробно описано в прилагаемой инструкции.
Как правило, начинается все с установки на пластиковый, карбоновый или металлический экзоскелет моторов. Затем размещаются PIN-кабели, регулирующие мощность моторов. Позже крепят на корпус приемник сигналов и управляющий модуль – мозговой центр.
На завершающей стадии устанавливают светодиоды, фиксаторы, аккумуляторы.
Сборка на этом заканчивается, но начинается самое интересное – прошивка, калибровка устройства и тонкая настройка, занимающая от 30 минут до 3 часов (в зависимости от производителя входящих в комплект деталей). К этому моменту аккумулятор должен быть полностью заряженным.
Сборка квадрокоптера из подручных материалов
Хотя она и популярна среди любителей «полетать» на беспилотниках, стоит признаться, что получить полноценный коптер она не позволяет. Покупать детали придется однозначно, только брать не весь комплект, а самые необходимые: винты, двигатели, аккумулятор, управляющую плату и приемник, управляющую аппаратуру, без которой невозможно управлять устройством.
Чтобы комплектующие в воздухе не развалились, их необходимо закрепить на легком, но прочном каркасе. Для изготовления такого подойти может все: палочки от мороженного, пластиковые бутылки и крышки.
Создавая корпус, нельзя забывать об устойчивости конструкции, собранной своими руками, равновесии, полетных качествах, легкости.
Если знания позволяют, схему можно придумать свою, если нет – найти в Интернет.
Первая сборка, как правило, лишь начало. В дальнейшем она будет многократно дорабатываться.

Есть одна хитрость, помогающая избежать сложных расчетов по балансировке – нужно выбрать конкретную модель, а под нее уже заказывать из базового списка комплектующие.
Главное, указывать правильно детали. К примеру, обязательно должно быть в списке по два мотора левого и правого вращения и соответствующие им винты. Иначе функционировать устройство не будет.
Если есть возможность, стоит заказать деталей больше – на случай замены бракованных (такое бывает). В отличие от продающихся наборов, своими руками (голыми) не получится собрать квадрокоптер.
Потребуются:
- клеевой пистолет;
- отвертка;
- паяльник;
- двухсторонний скотч;
- изолента.
Когда рабочая модель будет готова, настанет время модернизации, в результате которой у квадрокоптера могут появиться светодиоды, антенна, пищалки (биперы) и др., увеличивающие функциональность.
Видео: Квадрокоптер своими руками
$(«h1»).addClass(«shares_block»);
$(document).ready(function(){
if($(«a.rss»).length)
$(«a.rss»).after($(«.share.top»));
else
$(«h1»).before($(«.share.top»));
})
Главная причина того, что люди интересуются сборкой квадрокоптеров является желание сэкономить на покупке оригинального устройства. Однако это не единственная причина. Многие интересуются этим вопросом, поскольку хобби управления БПЛА перерастает в нечто большее, например, в участие в гонках квадрокоптеров, а выиграть в них возможно только максимально часто практикуясь, и дорабатывая конструкцию своего летающего дрона.
Сборка готового комплекта
Больше всего шансов собрать своими руками квадрокоптер у тех, кто действительно этого желает. Чтобы эту задачу упростить до элементарной сборки необходимо обзавестись соответствующим комплектом деталей. Их стоимость в разы ниже, чем у квадрокоптеров в стиле RTF. Причина этому то, что на плечи пользователя возлагается не только сборка конструкции, но и прошивка, калибровка и точная настройка устройства. Главным преимуществом таких комплектов является то, что подбирать мощность моторов, чипов и веса корпуса не приходится.
Также нет смысла беспокоиться о сбалансированности конструкции, что непосредственно влияет на поведение устройства в воздухе. При этом квадрокоптер будет обладать всеми запланированными характеристиками, включая скорость и время полета. Выбирая комплект, можно выбрать, будет квадрокоптер монолитным или разборным, т.е. модульным. Последний вариант больше заинтересует тех, кто хочет иметь достаточно габаритную, но в то же время легко переносимую модель. Стоит отметить, что подобные модели зачастую имеют весьма агрессивный и малопривлекательный дизайн.
Все потому, что в состав комплекта не входит внешний корпус, который выполняет и защитную и декоративную функции. Последовательность сборки подобных конструкций указывается в инструкциях, прилагаемых к комплектам деталей. Обычно сборка таких квадрокоптеров начинается с установки на экзоскелет, выполненный из пластика, металла или карбона, комплектных моторов. Вслед за ними устанавливаются PIN-кабели, выполняющие роль регуляторов мощности для установленных моторов. Далее на корпусе закрепляется приемник сигнала и главный мозговой центр – управляющий модуль.
В завершении сборки устанавливается аккумулятор, фиксаторы, светодиоды и прочие модули, отличающие модель от прочих. На этом пошаговая сборка заканчивается, и начинается все самое интересное, а именно процесс прошивки устройства, его калибровка и тонкая настройка, которая в зависимости от производителя комплектующих может составлять от получаса до трех часов. Важно, чтобы на момент прошивки аккумулятор был полностью заряжен. В противном случае этот процесс может завершиться неудачей.
Сборка из подручных материалов
Как ни прискорбно, но все же собрать полностью из подручных материалов полноценный квадрокоптер не получится. В любом случае придется закупать комплект из деталей. Но их можно покупать и не целым комплектом, а взять лишь самые необходимые. К ним относятся моторы, винты, управляющая плата с приемником и аккумулятор.
Это все что необходимо для того чтобы просто поднять квадрокоптер в воздух и управлять им с помощью аппаратуры. Для того чтобы в воздухе этот набор комплектующих элементов не развалился на куски, требуется закрепить их на прочном, но легком корпусе. Сделать его можно из подручных материалов. В ход может пойти все что угодно, начиная от палочек для мороженого до пластиковых крышек и бутылок.
Что касается дополнительных покупок, то понадобится также приобрести аппаратуру, поскольку без нее управлять собранным устройством будет чрезвычайно сложно. Схему квадрокоптера можно найти в сети, либо придумать самостоятельно. При создании корпуса, стоит помнить о полетных качествах, равновесии, устойчивости и легкости конструкции.
В противном случае устройство может превратиться не в БПЛА, а в ползающий мини вентилятор с дистанционным управлением. Дорабатывать созданную конструкцию можно будет бесконечно, поэтому при первой сборке можно особо не стараться, чтобы в процессе работы не потерять интерес.
Чтобы техническая часть была максимально сбалансированной без применения сложных расчетов, можно воспользоваться небольшой хитростью. Можно выбрать конкретную распространенную модель и заказать под нее комплектующие материалы из базового списка. При заказе важно правильно указать детали. Так, в списке заказа должны присутствовать по 2 мотора правого вращения, и левого вращения.
В пару к ним должны быть соответствующие винты – правосторонние и левосторонние. В противном случае устройство не будет функционировать. Всегда существует вероятность того, что при сборке деталей могут попасться бракованные заготовки, поэтому некоторые можно заказать даже в двойном экземпляре на случай замены. В отличие от заводских kit-наборов, описанных выше, из обычных деталей голыми руками и отверткой собрать такое устройство не получится. Придется поработать с паяльником, клеевым пистолетом, изолентой и двусторонним скотчем.
Только таким способом удастся получить желанный квадрокоптер. После того, как будет получена рабочая модель, ее можно будет модернизировать по своему усмотрению. Добавить антенны, светодиоды, биперы (пищалки) и прочие детали, увеличивающие функциональность домашнего кварокоптера.
Пошаговая сборка квадрокоптера своими руками: главный совет
Прежде, чем с головой кидаться в сборку собственного квадрокоптера, оцените, не отрываясь от реальности, свои силы. Учитывайте не только умение работать со столь опасным инструментом, как паяльник, но и финансовые возможности, т. е. какую сумму на комплектующие к квадрокоптеру вы сможете потратить без ущерба для личного бюджета. И только после этого приступайте к активной деятельности.
Купить отличные квадрокоптеры вы можете в — бесплатная доставка по России и СНГ, хорошие цены!
Полезные видео о том, как собрать квадрокоптер своими руками
Заинтересовали квадрокоптеры. Решил сделать заказ, выбор пал на хабсан х4 c камерой 0.3мр.
Дождался, получил.Достаточно много отлетал на нём(были краши, долгие ожидания запчастей и ремонты). Мой мозг посетила идея собрать большой квадрокоптер, окунулся в эту тему, перечитал много статей. По возможности отвечал на вопросы людей, состоящих в группе Rc моделистов: по поводу выбора деталей, сборки квадрокоптера. Из всего этого возникла идея написать сию статью.
Принцип полёта

Итак, Если вы решили собрать свой квадрокоптер, то вам необходимо определиться с бюджетом. От суммы, которую вы готовы потратить на это Чудо, зависит размер. Наиболее частые размеры(в мм.) это 250,330,450,550 и больше.
*250 размер
: маленький, легкий, чаще все используют только для FPV полётов.
*330 и 450
золотая середина для бюджетного квадрокоптера. Приемлемая масса и цена сборки.
*550
и больше можно отнести к профессиональным коптерам или мультироторам. Такие машины получатся тяжелыми и дорогостоящими. Для данных ЛА будут мощные двигатели и они могут таскать приличный вес, вплоть до килограммовых зеркалок.
Своё повествование я продолжу опираясь на коптер 450 масштаба.
Особое место в данной категории занимают рамы DJI 330 и 450, TBS Discovery.

Цена их соответствующая…высокая.
Есть множество клонов, его я и выбрал.

Настало время выяснить,что же такое
квадрокоптер и из чего он состоит.
1. Рама
2. Приёмник/Передатчик
3. Контроллер полёта:
a) AIOP
b) NAZA
c) MuliWii
d) HKPilot
е) AMP
f) И другие
4. Силовая установка
a) Мотор
b) Регулятор скорости
c) Пропеллеры
5. Аккумулятор
6. Доп. Оборудование:
a) FPV система (вид от первого лица в реальном времени)
Курсовая камера
Передатчик
OSD
b) Подвес для бортовой камеры
c) Подсветка
Теперь можно все детально рассмотреть.
1) С рамой
уже определились. 450 масштаб, клон TBS.

2) Приёмник/Передатчик.
Выбор его имеет очень важное значение. Вам нужно для себя понять: как далеко вы хотите летать.
Самые популярные варианты:
1,5-2км обеспечит 2,4Ггц
433 мгц обеспечит около 5-10км(все зависит от мощности, можно улететь и на 20км)
Для себя выбрал 2,4Ггц FlySky Th9x 9каналов

Не дорогая и простая в настройке аппаратура.
Для квадрокоптера необходимо от 5 каналов.
Выбор данной аппаратуры обусловлен её популярностью, давностью на рынке.Существует множество клонов.Ведётся много споров по поводу того, какая фирма была первой, это та же тургига 9, авионикс и другие… В интернете множество настроек.
3) Контроллер полёта
На данный момент очень много контроллеров полёта для квадрокоптеров. Свой выбор я сделал. Это Naza Lite c GPS
Не очень дорого и сердито. Наза требует минимальной настройки и сделать это очень просто.
С контроллерами AIOP, Crius и MultiWii будет много раз сложнее и особенно новичку.
Почему я взял контроллер с GPS?
Данная функция необходима для зависания в точке и возврата домой.
Я вижу это очень удобным функционалом.
4) Силовая установка
Вызывает множество вопросов у непосвященных.
Используются БК моторы. Они являются трёх фазными(3 провода), их КПД около 90%.
Для управления скоростью вращения таким мотором используется регулятор оборотов(регуль), который получает команды от контроллера полёта.
Рассмотрим рамы 330,450мм. В зависимости от ваших потребностей необходимо прикинуть вес квадрокоптера. В среднем получается от 1к до 1,5кг. Желательно чтобы тяга моторов была в 2-2,5 раза больше общей массы. Это говорит о том, что тяга должна быть 2-3 кг. Делим это на 4 и получаем тягу одного мотора: примерно 500-750 гр.
Возникает вопрос: какой двигатель выбрать? Смотрим в характеристики рамы: нас интересует какие двигатели можно в неё поставить. Должны интересовать первые 2 цифры: 22 или 28 в большинстве случаев.
Начинаем выбор двигателя. У названия двигателя вы увидите некую величину, например: 1100kv. Это величина обозначает количество оборотов на 1 вольт. Двигатели с высокими значениями kv имеют меньше витков обмотки статора, чем менее оборотистые.Из этого вытекает, что максимальная сила тока будет выше в двигателях с меньшим kv, которые имеют большую силу крутящего момента и это позволяет использовать большие пропеллеры.
Можно сравнить с коробкой передач автомобиля. 380kv и 1400kv это как первая и третья передача у авто.
380kv для размеренных медленных и долгих полётов с большой грузоподъемностью
1400kv для быстрого и маневренного хода.
В просторах интернета или же в описании этого двигателя можно увидеть его технические характеристики и результаты тестов. Нужно узнать максимальную силу тока (А) которую сможет потянуть двигатель и исходя их этих данных подобрать регулятор оборотов(ESC). Допустим max А для двигателя 20А. Тогда, ESC берём на 20-25% мощнее, 25-30А.
Теперь смотрим результаты тестов.
Например
видим: 11х4.7 –3S-12А – 830гр
Это означает
11х4.7 — характеристики пропеллера(11-дюймы, 4.7 шаг)
3S — число банок LiPo батареи
12А — сила тока в цепи при данной нагрузке
830гр – тяга двигателя при даных условиях
Таким образом, максимальная тяга 830х4=3300 гр., max сила тока в цепи 12х4=48А
Максимальная сила тока нужна для подбора Аккума и Проводки.
Для начала не берите карбоновые пропы. Переплата. Учитесь летать на дешевых.
Крепление пропеллера зависит от самого двигателя. Большинство пропеллеров имеют адаптер под ось двигателя. Возможно крепление на Цангах или же резьбой. Есть прекрасные варианты самозатягивающиеся-крепления у DJI, при таком варианте ваш пропеллер никогда не открутится во время полёта.
Для более простых вариантов советую дополнительно закрепить герметиком для резьбы.
Обращаю внимание
: сравнивать моторы с разным kv можно при условиях одного типоразмера. Например, EMAX XA 2212 существуют в разных конфигурациях:
820
980
1400
Их можно сравнить.
Эффективность мотора с 1400kv будет максимальной при использовании пропеллера 8040,
А мотора с 820kv — при пропеллере 1147.
Максимум крутящего момента будет у мотора с 820kv, поэтому целесообразно использовать большие пропеллеры. А мотор с 1400kv будет любить высокие обороты при меньшей нагрузке.
Разница между представленными моторами в обмотке.
Разумно их использовать так:
1400kv на раме 330 и пропеллерами 8040
980kv на раме 450 и пропеллерами 1045
820kv на раме 500-550 и пропеллерами 1147
Я выбрал
И пропеллеры
Замечательный набор.
Схема подключения
Для простоты: Сигнальный- черный, Силовой(+-) — красный

5) Аккумулятор
Выбирая аккум необходимо подобрать токоотдачу. Это число С.(25С,35С)
Не забываем что, по нашим данным система кушает 48А.
Допустим что, есть аккум 3300mAh 3S 35C Lipo Pack
3300 mAh — ёмкость аккума
3S – число банок(одна банка 3,7v)
35C – токоотдача. Т.е. Аккум ёмкостью 3.3Ah(3300 mAh) х 35C = 115А
Что достаточно покрывает наше энергопотребление. Даже излишне. Чем больше С, тем тяжелее и дороже аккум.
Посмотрим сможет ли аккум такой же ёмкости, но с токоотдачей 25С справится с нашими задачами или нет: 3.3Ah(3300 mAh) х 25C = 82А
Ответ:да.
Такой аккум будет легче и дешевле.
Для контроля состояния батареи можно купить такую штуку.
Для зарядки аккумов очень популярна Imax B6, будьте осторожны, очень много подделок.
И не забывайте с LiPo надо очень осторожно обращаться.
Мой совет: берите не меньше пары аккумов.
6) Доп. Оборудование.
Когда вы определились с дальностью полёт и выбрали систему управления, можно начинать выбор FPV системы:
FPV- дословно: вид от первого лица в реальном времени.
2,4Ггц совместима с 5,8Ггц
433Мгц совместима с 1,2 Ггц
Иначе будут создаваться совместные помехи.
Для своей 2.4Ггц я подобрал 5,8Ггц 200mw
FPV-система стостоит из:
1) Курсовой камеры
2) Передатчика на квадрике
3) Приёмной станции на земле.
Для Увеличения дальности связи можно заменить стандартные антены на «»клеверы»»
Большая часть передатчиков питается в пределах 9-12v, небольшая 3S батарея сможет запитать передатчик и камеру, которая выбирается для данного вольтажа.
Что значит 200mw?
Это мощность передатчика. Она непосредственно влияет на дальность связи. На открытой местности с нештатными антенами сигнал можно получать на расстоянии до 1 км.
С учетом того, что моя система управления на расстояние больше 1,5-2км не способна, это идеальный
вариант для моих потребностей.
С выбором приёмника и передатчика теперь все понятно, а как выбрать камеру, их огромное колличество?
Выбор камеры первоначально упирается в денежные средства.
Есть камеры которые имеют функцию потоковой передачи данных и одновременной записи.Стоимость таких камер значительно выше. Очень популярной является камера мобиус.
Появился её конкурент, тоже имеющий AV выход
Можно использовать курсовую камеру из самых дешовых, без корпуса. Стоимость которой колеблется от 600 до 1000рублей, а записывать с помощью хорошей экшен камеры на подвесе.
У FPV камеры мы увидим число ТВЛ. Что это такое? Это число строк развертки. Для FPV камеры будет достаточно 500-700ТВЛ. Важное значение имеет уровень минимальной освещенности, данный параметр измеряется в люксах. 0.01 люкс достаточно для полётов даже вечером. Угол обзора имеет не менее важное значение. 100-120 градусов это идеально. Не плохо бы иметь автоматическую коррекцию засветов и авто. баланс белого.
Картинку можно вывести на такой монитор
Можно прикупить 2х- или 3х-осевой подвес для камеры. Такая штука позволяет поворачивать камеру и иметь более стабильную картинку, без рывков и дерганий.
Штука достаточно дорогая.
У меня вот такой:
Естественно сама бортовая камера
Можно установить LED подсветку, пищалку,GPS-трэкер
Как вы поняли, что бы собрать такой БПЛА необходимо не мало вложений.
Цена приблизительно в пределах 400-500 долларов.
Этот обзор предназначен для новичков и несет в себе теорию, в скором времени будет продолжение.Со сборкой и настройкой.
Я запланировал цикл статей и буду не спеша их реализовывать.
Буду рад критике,спасибо
за просмотр.
Вскрою карты: конечный результат

Как такую штуку собрать и поднять в небо?
Инструкция будет в следующей части)
Вот небольшой ролик из первых полётов с подвесом.
P.S Покупалось все на личные средства.
Планирую купить
+99
Добавить в избранное
Обзор понравился
+62
+150
Добрый день.
В качестве первой радиоуправляемой воздушной модели я всем рекомендую именно квадрокоптер. Его устойчивость зависит от настройки электроники, надежность заключается в правильной пайке нескольких деталей и выборе регуляторовдвигателей. Так же хочется отметить его универсальность управления: с одной стороны в полете он очень похож на вертолет (вертикальная посадка и взлет, сбрасывание тягой скорости), с другой на самолет (несколько иная, отличная от вертолета модель поведения в воздухе), стоимость эксплуатации и живучесть при падениях. Навыки которые вы получите, облегчат переход на другие типы летательных аппаратов.
Какова цена билета в мир моделизма для новичка или что купить чтобы полететь на первом квадрокоптере?
Первым делом стоит кинуть в корзину RC-аппаратуру и зарядное устройство.
Модели будут меняться, падать, теряться и ремонтироваться, но эти две вещи останутся на долгие годы. Для начала будет вполне достаточно купить:
Передатчик (2000р
) и (900р
). Передатчик в продаже достаточно долго, все его болячки найдены, успешно лечатся статьями на форумах + руками, а с процессом модернизации справится даже школьник. Комплектуется средненькой штатной прошивкой(легко меняется) и приемником на 8 каналов, которых для начала хватит за глаза. Зарядку стоит брать только оригинал.
Так же если вы уверенны в своих силах и располагаете лишней тысячей рублей, стоит попробовать начать с новой (1800р
) + передающий модуль (1300р
). Но все же я рекомендую для начала взять старую добрую модель. Ещё одна очень важная деталь это , не вздумайте выходить на взлет без 10-15 часов налета на симуляторе.
Цена: 2000р3100р + 900р
Выбор рамы будующего ЛА.
Тут стоит остановиться на потребностях…
1.Для простых учебных полетов стоит брать небольшую пластиковую раму:
- (330р
) — небольшая рама, прочный пластик, очень компактные размеры, яркая окраска. - (430р
) — неубиваемый пластик + встроенная плата разводки. - (610р
) — рама чуть побольше функционалом(дополнительные этажи) + шарик поможет ориентироваться в положении импровизированного носа.
2. Если в перспективе хотите заняться съемками с воздуха смотреть стоит в сторону этих моделей:
- (1150р
) — алюминиевые лучи, наличие колпака, мягкие стойки возможность использования только «конфигурации +» - (1150р
) — складная рама!, алюминиевые лучи, многоярусность базы, мягкие стойки, возможность использования только «конфигурации х» - (3000р
) — складная углепластиковая рама, наличие колпака и мягких шасси, но высокая цена неприямлима для новичка. брать только в том случа если уверенны на 100% в том, что берете для съемок с воздуха при больших нагрузках на раму. - (700р
) — алюминиевые лучи, крепление для камеры, мягкие высокие стойки и конечно же низкая цена. из минусов пожалуй только отсутсвие колпака и небольшое количество ярусов базы.
Силовая установка которая включает в себя выбор двигателя, регулятора и винтов.
Двигатель
выбираем из потребностей в тяге. В идеале полетный вес должен быть в районе 23 от максимальной тяги для fpv и в 12 для пилотажных квадрокоптеров. Тягу расчитывать ориентировочно, по мощности: 100Вт мощности = 0.5 кг тяги
и не забывайте что двигателей у вас аж четыре.
- 300Вт (630р
) — разработан специально для мультироторных систем - 250Вт (570р
) — отлично сбалансированный мотор. отдельно стоит купить адаптер. - 350Вт (500р
) — мощный, отлично сбалансированный мотор. у самого такой стоит на FPV квадрокоптере. - — 100Вт (250р
) — маленький колокольчик. идеально для небольших моделей начального уровня. маленькая цена, низкий «обв» и вес. - 180Вт (400р
) — проверенный многоми колокольчик. простой. надежный. дешевый и достаточно мощный.
Регулятор
выбираем из характеристик двигателей, а именно: потреблении тока и напряжении работы. Допустим двигатель максимально потребляет 20А при 11.1В(3s), то регулятор стоит покупать с запасом 20-25% по токопотреблению и 11.1в(3s) по волтажу. Хотелось бы отметить две серии регуляторов которые отлично подходят для работы в мультироторных системах за счет высокой скорости работы процессора. На паркфлайере они относительно недавно:
- Turnigy MultiStar (250р
), (320р
), (400р
), (630р
) - Hobbyking Blue Series (260р
) (340р
), (380р
), (620р
)
Мой совет: выбирайте из зеленой серии. Их разрабатывали именно для мультироторов.
Пропеллер
для мультироторов бюджетной сферы однозначно надо покупать винты серии SF !двухлопастные!(КПД у двухлопастных винтов выше чем у трехлопастных), они намного лучше реализуют грузоподъемность при низких оборотах, легко разрушаются при контакте с поверхностью и стоят относительно других винтов очень дешево. Какой же винт выбрать по диаметру? Чем больше мощность — тем больше винт. Не поскупитесь и возьмите побольше комплектов (для начала хватит 20-24 винтов). Винты это основная статья расходов в эксплуатации мультикоптеров.
- 100-150Вт 8×4.5 правого( и ) и левого ( и ) вращения или комплект 2R+2L , пропеллеров.
- 150-200Вт 10×4.5 правого( и ) и левого ( и ) вращения или комплект 2R+2L , пропеллеров.
- 200-350Вт 12×4.5 правого( и ) и левого( и ) вращения или комплект 2R+2L , пропеллеров.
Стоит отметить что если вы не уверенны в выборе винта, возьмите равное количество близких диаметров, например: 8 штук 12х4.5 и 8 штук 10х4.5. Методом научного тыка найдите лучший.
Выбор контроллера стабилизации.
- (500р
) — очень дешевая маленькая плата, стандартная прошивка «квадрокоптер схемы +», легко настраивать отверткой прямо в поле, стабильность и качество плавают от партии к партии. Если и стоит брать, то только ради учебных полетов. - (1000р
) — из плюсов сразу хочется выделить наличие экрана, который очень сильно упрощает настройку в поле, постоянное допиливание прошивок (на данный момент версия 1.5), вот видео о том что может эта плата. - (2500р
) присутствие GPS, барометра, «возврата домой» и «удержания на точке» позволили мгновенно завоевать популярность этой плате. Для FPV идеальное решение. - Темные лошадки от фирмы MultiWii: (730р
), (1200р
) и (1500
). Вроде и цены хорошие для таких возможностей и USB порт для програмирования, но они не так популярны и как следсвие болячки их не изучены. С одной стороны вы можете получить отличную плату за небольшие деньги, с другой нарваться на брак и быть разочарованным в моделизме.
Комплектующие необходимые для сборки мультироторной системы.
- Аккумулятор
выбираем таким образом, чтобы его емкости хватило примерно на 10 минут полета. Допустим мотор в среднем потребляет 5А, а их у нас четыре, следовательно вся система в среднем будет потреблять 20А, теперь этот ток делим на!6! и получаем цифру емкости аккумулятора для 10 минут полета. Для этого примера 3.3 Ач. Линека с стоимостью аккумуляторов 3s 20С: