Емкостной датчик – это один из типов бесконтактных датчиков, принцип работы которого основан на изменении диэлектрической проницаемости среды между двух обкладок конденсатора. Одной обкладкой служит сенсорный датчик схемы в виде металлической пластины или провода, а второй – электропроводящее вещество, например, металл, вода или тело человека.
При разработке системы автоматического включения подачи воды в унитаз для биде возникла необходимость применения емкостного датчика присутствия и выключателя, обладающих высокой надежностью, устойчивостью к изменению внешней температуры, влажности, пыли и питающему напряжению. Хотелось также исключить необходимость прикосновения человека с органами управления системы. Предъявляемые требования могли обеспечить только схемы сенсорных датчиков, работающих на принципе изменения емкости. Готовой схемы удовлетворяющей необходимым требованиям не нашел, пришлось разработать самостоятельно.
Получился универсальный емкостной сенсорный датчик, который не требует настройки и реагирует на приближающиеся электропроводящие предметы, в том числе и человека, на расстояние до 5 см. Область применения предлагаемого сенсорного датчика не ограничена. Его можно применять, например, для включения освещения, систем охранной сигнализации, определения уровня воды и в многих других случаях.
Электрические принципиальные схемы
Для управления подачей воды в биде унитаза понадобилось два емкостных сенсорных датчика. Один датчик нужно было установить непосредственно на унитазе, он должен был выдавать сигнал логического нуля при присутствии человека, а при отсутствии сигнал логической единицы. Второй емкостной датчик должен был служить включателем воды и находиться в одном из двух логических состояний.
При поднесении к сенсору руки датчик должен был менять логическое состояние на выходе – из исходного единичного состояния переходить в состояние логического нуля, при повторном прикосновении руки из нулевого состояния переходить в состояние логической единицы. И так до бесконечности, пока на сенсорный включатель поступает разрешающий сигнал логического нуля с сенсорного датчика присутствия.
Схема емкостного сенсорного датчика
Основой схемы емкостного сенсорного датчика присутствия является задающий генератор прямоугольных импульсов, выполненный по классической схеме на двух логических элементах микросхемы D1.1 и D1.2. Частота генератора определяется номиналами элементов R1 и C1 и выбрана около 50 кГц. Значение частоты на работу емкостного датчика практически не влияет. Я менял частоту от 20 до 200 кГц и влияния на работу устройства визуально не заметил.
С 4 вывода микросхемы D1.2 сигнал прямоугольной формы через резистор R2 поступает на входы 8, 9 микросхемы D1.3 и через переменный резистор R3 на входы 12,13 D1.4. На вход микросхемы D1.3 сигнал поступает с небольшим изменением наклона фронта импульсов из-за установленного датчика, представляющего собой кусок провода или металлическую пластину. На входе D1.4, из за конденсатора С2, фронт изменяется на время, необходимое для его перезаряда. Благодаря наличию подстроечного резистора R3, есть возможность фронты импульса на входе D1.4, выставить равным фронту импульса на входе D1.3.
Если приблизить к антенне (сенсорному датчику) руку или металлический предмет, то емкость на входе микросхемы DD1.3 увеличится и фронт поступающего импульса задержатся во времени, относительно фронта импульса, поступающего на вход DD1.4. чтобы «уловить» эту задержку про инвертированные импульсы подаются на микросхему DD2.1, представляющую собой D триггер, работающий следующим образом. По положительному фронту импульса, поступающего на вход микросхемы C, на выход триггера передается сигнал, который в тот момент был на входе D. Следовательно, если сигнал на входе D не изменяется, поступающие импульсы на счетный вход C не оказывают влияния на уровень выходного сигнала. Это свойство D триггера и позволило сделать простой емкостной сенсорный датчик.
Когда емкость антенны, из за приближения к ней тела человека, на входе DD1.3 увеличивается, импульс задерживается и это фиксирует D триггер, изменяя свое выходное состояние. Светодиод HL1 служит для индикации наличия питающего напряжения, а HL2 для индикации приближения к сенсорному датчику.
Схема сенсорного включателя
Схему емкостного сенсорного датчика можно использовать и для работы сенсорного включателя, но с небольшой доработкой, так как ему необходимо не только реагировать на приближение тела человека, но и оставаться в установившемся состоянии после удаления руки. Для решения этой задачи пришлось к выходу сенсорного датчика добавить еще один D триггер, DD2.2, включенный по схеме делителя на два.
Схема емкостного датчика была немного доработана. Для исключения ложных срабатываний, так как человек может подносить и удалять руку медленно, из-за наличия помех датчик может выдавать на счетный вход D триггера несколько импульсов, нарушая необходимый алгоритм работы включателя. Поэтому была добавлена RC цепочка из элементов R4 и C5, которая на небольшое время блокировала возможность переключение D триггера.

Триггер DD2.2 работает так же, как и DD2.1, но сигнал на вход D подается не с других элементов, а с инверсного выхода DD2.2. В результате по положительному фронту импульса, приходящего на вход С сигнал на входе D изменяется на противоположный. Например, если в исходном состоянии на выводе 13 был логический ноль, то поднеся руку к сенсору один раз, триггер переключится и на выводе 13 установится логическая единица. При следующем воздействии на сенсор, на выводе 13 опять установится логический ноль.
Для блокировки включателя при отсутствии человека на унитазе, с сенсора на вход R (установка нуля на выходе триггера вне зависимости от сигналов на всех остальных его входах) микросхемы DD2.2 подается логическая единица. На выходе емкостного выключателя устанавливается логический ноль, который по жгуту подается на базу ключевого транзистора включения электромагнитного клапана в Блоке питания и коммутации.
Резистор R6, при отсутствии блокирующего сигнала с емкостного датчика в случае его отказа или обрыва управляющего провода, блокирует триггер по входу R, тем самым исключает возможность самопроизвольной подачи воды в биде. Конденсатор С6 защищает вход R от помех. Светодиод HL3 служит для индикации подачи воды в биде.
Конструкция и детали емкостных сенсорных датчиков
Когда я начал разрабатывать сенсорную систему подачи воды в биде, то наиболее трудной задачей мне казалась разработка емкостного датчика присутствия. Обусловлено это было рядом ограничений по установке и эксплуатации. Не хотелось, чтобы датчик был механически связан с крышкой унитаза, так как ее периодически надо снимать для мойки, и не мешал при санитарной обработке самого унитаза. Поэтому и выбрал в качестве реагирующего элемента емкость.
Сенсорного датчика присутствия
По выше опубликованной схеме сделал опытный образец. Детали емкостного датчика собраны на печатной плате, плата размещена в пластмассовой коробке и закрывается крышкой. Для подключения антенны в корпусе установлен одноштырьковый разъем, для подачи питающего напряжения и сигнала установлен четырех контактный разъем РШ2Н. Соединена печатная плата с разъемами пайкой медными проводниками в фторопластовой изоляции.

Сенсорный емкостной датчик собран на двух микросхемах КР561 серии, ЛЕ5 и ТМ2. Вместо микросхемы КР561ЛЕ5 можно применить КР561ЛА7. Подойдут и микросхемы 176 серии, импортные аналоги. Резисторы, конденсаторы и светодиоды подойдут любого типа. Конденсатор С2, для стабильной работы емкостного датчика при эксплуатации в условиях больших колебаниях температуры окружающей среды нужно брать с малым ТКЕ.
Установлен датчик под площадкой унитаза, на которой установлен сливной бачек в месте, куда в случае протечки из бачка вода попасть не сможет. К унитазу корпус датчика приклеен с помощью двустороннего скотча.

Антенный датчик емкостного сенсора представляет собой отрезок медного многожильного провода длинной 35 см в изоляции из фторопласта, приклеенного с помощью прозрачного скотча к внешней стенке чаши унитаза на сантиметр ниже плоскости очка. На фотографии сенсор хорошо виден.

Для настойки чувствительности сенсорного датчика необходимо после его установки на унитаз, изменяя сопротивление подстроечного резистора R3 добиться, чтобы светодиод HL2 погас. Далее положить руку на крышку унитаза над местом нахождения сенсора, светодиод HL2 должен загораться, если руку убрать, потухнуть. Так как бедро человека по массе больше руки, то при эксплуатации сенсорный датчик, после такой настройки, будет работать гарантировано.
Конструкция и детали емкостного сенсорного включателя
Схема емкостного сенсорного включателя имеет больше деталей и для их размещения понадобился корпус большего размера, да и по эстетическим соображениям, внешний вид корпуса, в котором был размещен сенсорный датчик присутствия не очень подходил для установки на видном месте. Внимание на себя обратила настенная розетка rj-11 для подключения телефона. По размерам она подходила и имела хороший внешний вид. Удалив из розетки все лишнее, разместил в ней печатную плату емкостного сенсорного выключателя.

Для закрепления печатной платы в основании корпуса была установлена короткая стойка и к ней с помощью винта прикручена печатная плата с деталями сенсорного выключателя.

Датчик емкостного сенсора сделал, приклеив ко дну крышки розетки клеем «Момент» лист латуни, предварительно вырезав в них окошко для светодиодов. При закрывании крышки, пружина (взята от кремневой зажигалки) соприкасается с латунным листом и таким образом обеспечивается электрический контакт между схемой и сенсором.

Крепится емкостной сенсорный включатель на стену с помощью одного самореза. Для этого в корпусе предусмотрено отверстие. Далее устанавливается плата, разъем и закрепляется защелками крышка.

Настройка емкостного выключателя практически не отличается от настройки сенсорного датчика присутствия, описанного выше. Для настойки нужно подать питающее напряжение и резистором отрегулировать, чтобы светодиод HL2 загорался, когда к датчику подносится рука, и гас, при ее удалении. Далее нужно активировать сенсорный датчик и поднести и удалить руку к сенсору выключателя. Должен мигнуть светодиод HL2 и загореться красный светодиод HL3. При удалении руки красный светодиод должен продолжать светиться. При повторном поднесении руки или удалении тела от датчика, светодиод HL3 должен погаснуть, то есть выключить подачу воды в биде.
Универсальная печатная плата
Представленные выше емкостные датчики собраны на печатных платах, несколько отличающихся от печатной платы приведенной ниже на фотографии. Это связано с объединением обеих печатных плат в одну универсальную. Если собирать сенсорный включатель, то необходимо только перерезать дорожку под номером 2. Если собирать сенсорный датчик присутствия, то удаляется дорожка номер 1 и не все элементы устанавливаются.

Не устанавливаются элементы, необходимые для работы сенсорного включателя, но мешающие работе датчика присутствия, R4, С5, R6, С6, HL2 и R4. Вместо R4 и С6 запаиваются проволочные перемычки. Цепочку R4, С5 можно оставить. Она не будет влиять на работу.
Ниже приведен рисунок печатной платы для накатки при использовании термического метода нанесения на фольгу дорожек.

Достаточно распечатать рисунок на глянцевой бумаге или кальке и шаблон готов для изготовления печатной платы.
Безотказная работа емкостных датчиков для сенсорной системы управления подачи воды в биде подтверждена на практике в течении трех лет постоянной эксплуатации. Сбоев в работе не зафиксировано.
Однако хочу заметить, что схема чувствительна к мощным импульсным помехам. Мне приходило письмо о помощи в настройке. Оказалось, что во время отладки схемы рядом находился паяльник с тиристорным регулятором температуры. После выключения паяльника схема заработала.
Еще был такой случай. Емкостной датчик был установлен в светильник, который подключался в одну розетку с холодильником. При его включении свет включался и при повторном выключался. Вопрос был решен подключением светильника в другую розетку.
Приходило письмо об успешном применении описанной схемы емкостного датчика для регулировки уровня воды в накопительном баке из пластика. В нижней и верхней части было приклеено силиконом по датчику, которые управляли включением и выключением электрического насоса.
Емкостной датчик – это один из типов бесконтактных датчиков, принцип работы которого основан на изменении диэлектрической проницаемости среды между двух обкладок конденсатора. Одной обкладкой служит сенсорный датчик схемы в виде металлической пластины или провода, а второй – электропроводящее вещество, например, металл, вода или тело человека.
При разработке системы автоматического включения подачи воды в унитаз для биде возникла необходимость применения емкостного датчика присутствия и выключателя, обладающих высокой надежностью, устойчивостью к изменению внешней температуры, влажности, пыли и питающему напряжению. Хотелось также исключить необходимость прикосновения человека с органами управления системы. Предъявляемые требования могли обеспечить только схемы сенсорных датчиков, работающих на принципе изменения емкости. Готовой схемы удовлетворяющей необходимым требованиям не нашел, пришлось разработать самостоятельно.
Получился универсальный емкостной сенсорный датчик, который не требует настройки и реагирует на приближающиеся электропроводящие предметы, в том числе и человека, на расстояние до 5 см. Область применения предлагаемого сенсорного датчика не ограничена. Его можно применять, например, для включения освещения, систем охранной сигнализации, определения уровня воды и в многих других случаях.
Электрические принципиальные схемы
Для управления подачей воды в биде унитаза понадобилось два емкостных сенсорных датчика. Один датчик нужно было установить непосредственно на унитазе, он должен был выдавать сигнал логического нуля при присутствии человека, а при отсутствии сигнал логической единицы. Второй емкостной датчик должен был служить включателем воды и находиться в одном из двух логических состояний.
При поднесении к сенсору руки датчик должен был менять логическое состояние на выходе – из исходного единичного состояния переходить в состояние логического нуля, при повторном прикосновении руки из нулевого состояния переходить в состояние логической единицы. И так до бесконечности, пока на сенсорный включатель поступает разрешающий сигнал логического нуля с сенсорного датчика присутствия.
Схема емкостного сенсорного датчика
Основой схемы емкостного сенсорного датчика присутствия является задающий генератор прямоугольных импульсов, выполненный по классической схеме на двух логических элементах микросхемы D1.1 и D1.2. Частота генератора определяется номиналами элементов R1 и C1 и выбрана около 50 кГц. Значение частоты на работу емкостного датчика практически не влияет. Я менял частоту от 20 до 200 кГц и влияния на работу устройства визуально не заметил.
С 4 вывода микросхемы D1.2 сигнал прямоугольной формы через резистор R2 поступает на входы 8, 9 микросхемы D1.3 и через переменный резистор R3 на входы 12,13 D1.4. На вход микросхемы D1.3 сигнал поступает с небольшим изменением наклона фронта импульсов из-за установленного датчика, представляющего собой кусок провода или металлическую пластину. На входе D1.4, из за конденсатора С2, фронт изменяется на время, необходимое для его перезаряда. Благодаря наличию подстроечного резистора R3, есть возможность фронты импульса на входе D1.4, выставить равным фронту импульса на входе D1.3.
Если приблизить к антенне (сенсорному датчику) руку или металлический предмет, то емкость на входе микросхемы DD1.3 увеличится и фронт поступающего импульса задержатся во времени, относительно фронта импульса, поступающего на вход DD1.4. чтобы «уловить» эту задержку про инвертированные импульсы подаются на микросхему DD2.1, представляющую собой D триггер, работающий следующим образом. По положительному фронту импульса, поступающего на вход микросхемы C, на выход триггера передается сигнал, который в тот момент был на входе D. Следовательно, если сигнал на входе D не изменяется, поступающие импульсы на счетный вход C не оказывают влияния на уровень выходного сигнала. Это свойство D триггера и позволило сделать простой емкостной сенсорный датчик.
Когда емкость антенны, из за приближения к ней тела человека, на входе DD1.3 увеличивается, импульс задерживается и это фиксирует D триггер, изменяя свое выходное состояние. Светодиод HL1 служит для индикации наличия питающего напряжения, а HL2 для индикации приближения к сенсорному датчику.
Схема сенсорного включателя
Схему емкостного сенсорного датчика можно использовать и для работы сенсорного включателя, но с небольшой доработкой, так как ему необходимо не только реагировать на приближение тела человека, но и оставаться в установившемся состоянии после удаления руки. Для решения этой задачи пришлось к выходу сенсорного датчика добавить еще один D триггер, DD2.2, включенный по схеме делителя на два.
Схема емкостного датчика была немного доработана. Для исключения ложных срабатываний, так как человек может подносить и удалять руку медленно, из-за наличия помех датчик может выдавать на счетный вход D триггера несколько импульсов, нарушая необходимый алгоритм работы включателя. Поэтому была добавлена RC цепочка из элементов R4 и C5, которая на небольшое время блокировала возможность переключение D триггера.
Триггер DD2.2 работает так же, как и DD2.1, но сигнал на вход D подается не с других элементов, а с инверсного выхода DD2.2. В результате по положительному фронту импульса, приходящего на вход С сигнал на входе D изменяется на противоположный. Например, если в исходном состоянии на выводе 13 был логический ноль, то поднеся руку к сенсору один раз, триггер переключится и на выводе 13 установится логическая единица. При следующем воздействии на сенсор, на выводе 13 опять установится логический ноль.
Для блокировки включателя при отсутствии человека на унитазе, с сенсора на вход R (установка нуля на выходе триггера вне зависимости от сигналов на всех остальных его входах) микросхемы DD2.2 подается логическая единица. На выходе емкостного выключателя устанавливается логический ноль, который по жгуту подается на базу ключевого транзистора включения электромагнитного клапана в Блоке питания и коммутации.
Резистор R6, при отсутствии блокирующего сигнала с емкостного датчика в случае его отказа или обрыва управляющего провода, блокирует триггер по входу R, тем самым исключает возможность самопроизвольной подачи воды в биде. Конденсатор С6 защищает вход R от помех. Светодиод HL3 служит для индикации подачи воды в биде.
Конструкция и детали емкостных сенсорных датчиков
Когда я начал разрабатывать сенсорную систему подачи воды в биде, то наиболее трудной задачей мне казалась разработка емкостного датчика присутствия. Обусловлено это было рядом ограничений по установке и эксплуатации. Не хотелось, чтобы датчик был механически связан с крышкой унитаза, так как ее периодически надо снимать для мойки, и не мешал при санитарной обработке самого унитаза. Поэтому и выбрал в качестве реагирующего элемента емкость.
Сенсорного датчика присутствия
По выше опубликованной схеме сделал опытный образец. Детали емкостного датчика собраны на печатной плате, плата размещена в пластмассовой коробке и закрывается крышкой. Для подключения антенны в корпусе установлен одноштырьковый разъем, для подачи питающего напряжения и сигнала установлен четырех контактный разъем РШ2Н. Соединена печатная плата с разъемами пайкой медными проводниками в фторопластовой изоляции.
Сенсорный емкостной датчик собран на двух микросхемах КР561 серии, ЛЕ5 и ТМ2. Вместо микросхемы КР561ЛЕ5 можно применить КР561ЛА7. Подойдут и микросхемы 176 серии, импортные аналоги. Резисторы, конденсаторы и светодиоды подойдут любого типа. Конденсатор С2, для стабильной работы емкостного датчика при эксплуатации в условиях больших колебаниях температуры окружающей среды нужно брать с малым ТКЕ.
Установлен датчик под площадкой унитаза, на которой установлен сливной бачек в месте, куда в случае протечки из бачка вода попасть не сможет. К унитазу корпус датчика приклеен с помощью двустороннего скотча.
Антенный датчик емкостного сенсора представляет собой отрезок медного многожильного провода длинной 35 см в изоляции из фторопласта, приклеенного с помощью прозрачного скотча к внешней стенке чаши унитаза на сантиметр ниже плоскости очка. На фотографии сенсор хорошо виден.
Для настойки чувствительности сенсорного датчика необходимо после его установки на унитаз, изменяя сопротивление подстроечного резистора R3 добиться, чтобы светодиод HL2 погас. Далее положить руку на крышку унитаза над местом нахождения сенсора, светодиод HL2 должен загораться, если руку убрать, потухнуть. Так как бедро человека по массе больше руки, то при эксплуатации сенсорный датчик, после такой настройки, будет работать гарантировано.
Конструкция и детали емкостного сенсорного включателя
Схема емкостного сенсорного включателя имеет больше деталей и для их размещения понадобился корпус большего размера, да и по эстетическим соображениям, внешний вид корпуса, в котором был размещен сенсорный датчик присутствия не очень подходил для установки на видном месте. Внимание на себя обратила настенная розетка rj-11 для подключения телефона. По размерам она подходила и имела хороший внешний вид. Удалив из розетки все лишнее, разместил в ней печатную плату емкостного сенсорного выключателя.
Для закрепления печатной платы в основании корпуса была установлена короткая стойка и к ней с помощью винта прикручена печатная плата с деталями сенсорного выключателя.
Датчик емкостного сенсора сделал, приклеив ко дну крышки розетки клеем «Момент» лист латуни, предварительно вырезав в них окошко для светодиодов. При закрывании крышки, пружина (взята от кремневой зажигалки) соприкасается с латунным листом и таким образом обеспечивается электрический контакт между схемой и сенсором.
Крепится емкостной сенсорный включатель на стену с помощью одного самореза. Для этого в корпусе предусмотрено отверстие. Далее устанавливается плата, разъем и закрепляется защелками крышка.
Настройка емкостного выключателя практически не отличается от настройки сенсорного датчика присутствия, описанного выше. Для настойки нужно подать питающее напряжение и резистором отрегулировать, чтобы светодиод HL2 загорался, когда к датчику подносится рука, и гас, при ее удалении. Далее нужно активировать сенсорный датчик и поднести и удалить руку к сенсору выключателя. Должен мигнуть светодиод HL2 и загореться красный светодиод HL3. При удалении руки красный светодиод должен продолжать светиться. При повторном поднесении руки или удалении тела от датчика, светодиод HL3 должен погаснуть, то есть выключить подачу воды в биде.
Универсальная печатная плата
Представленные выше емкостные датчики собраны на печатных платах, несколько отличающихся от печатной платы приведенной ниже на фотографии. Это связано с объединением обеих печатных плат в одну универсальную. Если собирать сенсорный включатель, то необходимо только перерезать дорожку под номером 2. Если собирать сенсорный датчик присутствия, то удаляется дорожка номер 1 и не все элементы устанавливаются.
Не устанавливаются элементы, необходимые для работы сенсорного включателя, но мешающие работе датчика присутствия, R4, С5, R6, С6, HL2 и R4. Вместо R4 и С6 запаиваются проволочные перемычки. Цепочку R4, С5 можно оставить. Она не будет влиять на работу.
Ниже приведен рисунок печатной платы для накатки при использовании термического метода нанесения на фольгу дорожек.
Достаточно распечатать рисунок на глянцевой бумаге или кальке и шаблон готов для изготовления печатной платы.
Безотказная работа емкостных датчиков для сенсорной системы управления подачи воды в биде подтверждена на практике в течении трех лет постоянной эксплуатации. Сбоев в работе не зафиксировано.
Однако хочу заметить, что схема чувствительна к мощным импульсным помехам. Мне приходило письмо о помощи в настройке. Оказалось, что во время отладки схемы рядом находился паяльник с тиристорным регулятором температуры. После выключения паяльника схема заработала.
Еще был такой случай. Емкостной датчик был установлен в светильник, который подключался в одну розетку с холодильником. При его включении свет включался и при повторном выключался. Вопрос был решен подключением светильника в другую розетку.
Приходило письмо об успешном применении описанной схемы емкостного датчика для регулировки уровня воды в накопительном баке из пластика. В нижней и верхней части было приклеено силиконом по датчику, которые управляли включением и выключением электрического насоса.
Ультразвуковой датчик
Ультразвуковой сенсор — один из двух сенсоров, заменяющих роботу зрение. Ультразвуковой сенсор позволяет роботу видеть и обнаруживать объекты. Его также можно использовать для того, чтобы робот мог обойти препятствия, оценить и измерить расстояние, а также зафиксировать движение объекта.
Показания ультразвукового датчика измеряется в сантиметрах и дюймах. Он может измерять расстояние от 0 до 255 сантиметров с точностью +/-3 см. Ультразвуковой сенсор работает по тому же принципу, что и локатор летучей мыши: он измеряет расстояние путем расчета времени, которое потребовалось звуковой волне для возвращения после отражения от объекта, подобно эху.
Крупные объекты с твердыми поверхностями определяются лучше всего. Объекты из мягких материалов (тканей) или округлые (мяч), а также слишком тонкие, маленькие и т.п., могут создавать для сенсора определенные затруднения при работе.
Следует помнить, что два и более ультразвуковых датчика, работающих в одном помещении, могут интерферировать и снижать точность результатов
К примерам применения ультразвуковых датчиков расстояния можно отнести использования в машинах для предупреждающих сигналов водителю или автоматический контроль по сигналам от датчиков, идентифицирующих опасные ситуации, объединяемых в сетевые связи, с человеко-машинным интерфейсом human — machine interface (HMI).
Рис.1
В основе ультразвукового принципа обнаружения препятствий лежит принцип эха. В состав датчика входят два преобразователя: один преобразователь излучает ультразвуковые волны, а отраженные волны обнаруживаются другим, одним или более, преобразователем. Тот же самый преобразователь, который передает ультразвуковые волны, может быть использован и для обнаружения отраженной волны. Основное назначение датчиков — обнаруживать присутствие или отсутствие препятствия, но данный принцип (time of flight) позволяет также по времени возвращения эха при известной скорости распространения звука рассчитывать расстояние до объекта.
Ультразвук представляет собой не что иное, как вибрацию на частоте > 20 кГц. Большинство коммерчески доступных преобразователей работает на частотах в диапазоне 40-250 кГц.
Вариации акустических параметров датчиков, окружающая среда и различные цели значительно влияют на работу устройств .
В ультразвуковом датчике преобразователь генерирует короткий импульс, направляемый на цель и возвращающийся обратно
Важно, что скорость звука является функцией состава и температуры среды (воздуха) и влияет на точность и разрешение датчика. Точность измерений расстояния прямо пропорциональна точности значения скорости звука, используемого в вычислениях, и варьируется в реальных условиях от 345 м/c при комнатной температуре до более чем 380 м/c при температуре порядка 70 °C. Длина звуковой волны
является функцией скорости ультразвука c и взаимосвязана с его частотой ѓ, поэтому эти параметры (длина волны и частота) также влияют на разрешение и точность, а также минимальный размер целей и диапазон расстояний, измеряемых датчиком.
Затухание звука является функцией частоты и влажности, что влияет на максимальное расстояние, детектируемое датчиком. Длинные волны (с меньшей частотой) характеризуются меньшим затуханием. На частотах свыше 125 кГц максимальное затухание случается при относительной влажности 100%, на частотах 40 кГц — уже при влажности в 50%. Так как датчик должен работать при любых значениях влажности, в расчетах используется максимальное затухание для каждой частоты.
Фоновые шумы являются функцией частоты и уменьшаются с ее увеличением, также оказывая влияние на максимально детектируемое расстояние и минимальный размер цели. Разрешение и точность на высоких частотах выше, тогда как диапазон выше с более длинными волнами.
Датчик касания
Датчик касания это кнопка, у которой возможно два состояния — нажато и отжато. Программно датчик распознает еще одно состояние Касание.
Увидеть на экране дисплея реакцию датчика касания можно в режиме Просмотра. При не нажатой кнопке датчика на дисплее появляется 0, а при нажатой — 1.
Добавив в конструкцию робота датчик касания (например в виде бампера) вы можете сделать так, чтобы робот изменил поведение при активации датчика.
Датчик касания является одним из органов осязания для роботов, что делает его необходимым там где требуется реакция робота на объекты.
Датчик касания позволяет роботу осуществлять прикосновения.
Сенсор нажатия может определить момент нажатия на него чего-либо, а так же момент освобождения.
Датчик касания представлен на рис.2.
Рис.2 Датчик касания
Микрометр
Для замера холостого хода у датчика касания необходим микрометр (или Индикатор часового типа) ИЧ-25 который будет измерять расстояние прошедшее датчиком до момента срабатывания.
ИЧ-25 предназначен для измерения линейных размеров абсолютным и относительным методами, определения величины отклонений от заданной геометрической формы и взаимного расположения поверхностей.
На рис.3 представлены несколько видов индикаторов.

Рис.3.
Параметры микрометра ИЧ 25:
Диапазон измерений 0-25 мм.
Цена деления 0.01 мм.
Габариты 159х85х51 мм.
В системе СИ основными
единицами считаются масса, длина и время, в то время как сила и ускорение – производными
единицами. В Британской и американской системах единиц основными единицами считаются сила, длина и время. Единица измерения силы является одной из фундаментальных физических величин. Измерение сил проводится и при проведении механических исследований, и в гражданском строительстве, и при взвешивании объектов, и при изготовлении протезов и т.д. При определении давления также требуется измерение силы. Считается, что при работе с твердыми объектами измеряется сила, а при работе с жидкостями и газами определяется давление. Это значит, что сила рассматривается тогда, когда действие приложено к конкретной точке, а давление определяется тогда, когда сила распределена по сравнительно большой площади.
Датчики силы можно разделить на два класса: количественные и качественные. Количественные датчики измеряют силу и представляют ее значение в электрических единицах. Примерами таких датчиков являются динамометрические элементы и тензодатчики. Качественные датчики — это пороговые устройства, чья функция заключается не в количественном определении значения силы, а в детектировании превышения заданного уровня приложенной силы. Примером таких устройств является клавиатура компьютера, каждая клавиша которой замыкает соответствующий контакт только при нажатии на нее с определенной силой. Качественные датчики часто используются для детектирования движения и положения объектов. Коврик у двери, реагирующий на давление, приложенное к нему, и пьезоэлектрический кабель также являются примерами качественных датчиков давления.
Методы измерения силы можно разделить на следующие группы:
1. Уравновешивание неизвестной силы силой тяжести тела известной массы
2. Измерение ускорения тела известной массы, к которому приложена неизвестная сила
3. Уравновешивание неизвестной силы электромагнитной силой
4. Преобразование силы в давление жидкости и измерение этого давления
5. Измерение деформации упругого элемента системы, вызванной неизвестной силой
В современных датчиках наиболее часто применяется 5 метод, а методы 3 и 4 используются сравнительно редко.
В большинстве датчиков не происходит прямого преобразования силы в электрический сигнал. Для этого обычно требуется несколько промежуточных этапов. Поэтому, как правило, датчики силы являются составными устройствами. Например, датчик силы часто представляет собой комбинацию преобразователя сила-перемещение и детектора положения (перемещения). Это может быть простая спиральная пружина, уменьшение длины которой, вызванное приложенной силой сжатия, будет пропорционально ее коэффициенту упругости.
На рис.1А показан датчик, состоящий из пружины и детектора перемещений, реализованного на основе линейно регулируемого дифференциального трансформатора (ЛРДТ). В линейном диапазоне изменения длины пружины напряжение на выходе ЛРДТ пропорционально приложенной силе. На рис. 1Б представлен еще один вариант датчика силы, состоящий из гофрированной мембраны, заполненной жидкостью, непосредственно на которую и действует сила, и датчика давления. Гофрированная мембрана, распределяя силу на входе по поверхности чувствительного элемента датчика давления, играет роль преобразователя сила-давление.
 Тензодатчик
Тензодатчик
— это гибкий резистивный чувствительный элемент, сопротивление которого пропорционально приложенному механическому напряжению (величине деформации). Все тензодатчики построены на основе ранее упоминавшегося пьезорезистивного эффекта. Проволочный тензодатчик представляет собой резистор, наклеенный на гибкую подложку, которая в свою очередь прикрепляется на объект, где измеряется сила или напряжение. При этом должна обеспечиваться надежная механическая связь между объектом и тензочувствительным элементом, в то время как провод резистора должен быть электрически изолирован от объекта. Коэффициенты теплового расширения подложки и провода должны быть согласованы. Для получения хорошей чувствительности датчик должен иметь длинные продольные участки и короткие поперечные (рис. 2). Это делается для того, чтобы чувствительность в поперечном направлении не превышала 2% от продольной чувствительности. Для измерения напряжeний в разных направлениях меняется конфигурация датчиков. Следует отметить, что полупроводниковые тензочувствительные элементы обладают довольно сильной чувствительностью к изменениям температуры, поэтому в интерфейсных схемах или в самих датчиках необходимо предусматривать цепи температурной компенсации.
Тактильные датчики
— это специальный класс преобразователей силы или давления, которые характеризуются небольшой толщиной. Эти датчики полезны в случаях, когда сила или давление измеряются между двумя поверхностями, расположенными близко друг к другу. Такие датчики часто используются в робототехнике, например, их устанавливают на «пальцы» механических приводов для обеспечения обратной связи при контакте с объектом — это напоминает то, как работают тактильные сенсоры кожи человека. Датчики касания используются в сенсорных дисплеях, клавиатурах и других устройствах, где необходимо реагировать на физическое прикосновение. Тактильные датчики широко применяются в биомедицине, для определения прикуса зубов и правильности установки коронок в стоматологической практике, а также при исследовании давления на ноги человека при ходьбе. Иногда при проведении операций протезирования их устанавливают в искусственные суставы для корректировки положения и т.д. В строительстве и на механических производствах тактильные датчики используются для определения сил, действующих на закрепленные устройства.
 Для изготовления тактильных чувствительных элементов используются несколько методов. В некоторых из них на поверхности объекта формируется специальный тонкий слой из материала, чувствительного к механическим напряжениям. На рис. 3 показан простой тактильный датчик, обеспечивающий функции включения-выключения, состоящий из двух листов фольги и прокладки. Внутри прокладки сделаны круглые (или любой другой необходимой формы) отверстия. Один из листов фольги заземлен, а второй подсоединен к нагрузочному резистору. Если требуется контролировать несколько чувствительных зон, используется мультиплексор. Когда к верхнему проводнику прикладывается внешняя сила над отверстием в прокладке, он прогибается и соприкасается с нижним проводником, тем самым устанавливая с ним электрический контакт, заземляющий нагрузочный резистор. При этом выходной сигнал становится равным нулю, что свидетельствует о приложенной силе. Верхний и нижний проводники могут изготавливаться методом трафаретной печати проводящими чернилами на подложке. Чувствительные зоны таких датчиков определяются рядами и колонками проводников, нанесенных чернилами. Прикосновение в определенному участку чувствительной поверхности приводит к замыканию соответствующих ряда и колонки, что показывает локализацию приложенной силы. Хорошие тактильные датчики получаются на основе пьезоэлектрических пленок, которые используются как в пассивном, так и в активном режимах. Многие тактильные датчики выполняют функции сенсорных переключателей. В отличие от традиционных переключателей, надежность контактов которых сильно снижается при попадании на них влаги и пыли, пьезоэлектрические ключи, благодаря своему монолитному исполнению, могут работать в неблагоприятных условиях окружающей среды.
Для изготовления тактильных чувствительных элементов используются несколько методов. В некоторых из них на поверхности объекта формируется специальный тонкий слой из материала, чувствительного к механическим напряжениям. На рис. 3 показан простой тактильный датчик, обеспечивающий функции включения-выключения, состоящий из двух листов фольги и прокладки. Внутри прокладки сделаны круглые (или любой другой необходимой формы) отверстия. Один из листов фольги заземлен, а второй подсоединен к нагрузочному резистору. Если требуется контролировать несколько чувствительных зон, используется мультиплексор. Когда к верхнему проводнику прикладывается внешняя сила над отверстием в прокладке, он прогибается и соприкасается с нижним проводником, тем самым устанавливая с ним электрический контакт, заземляющий нагрузочный резистор. При этом выходной сигнал становится равным нулю, что свидетельствует о приложенной силе. Верхний и нижний проводники могут изготавливаться методом трафаретной печати проводящими чернилами на подложке. Чувствительные зоны таких датчиков определяются рядами и колонками проводников, нанесенных чернилами. Прикосновение в определенному участку чувствительной поверхности приводит к замыканию соответствующих ряда и колонки, что показывает локализацию приложенной силы. Хорошие тактильные датчики получаются на основе пьезоэлектрических пленок, которые используются как в пассивном, так и в активном режимах. Многие тактильные датчики выполняют функции сенсорных переключателей. В отличие от традиционных переключателей, надежность контактов которых сильно снижается при попадании на них влаги и пыли, пьезоэлектрические ключи, благодаря своему монолитному исполнению, могут работать в неблагоприятных условиях окружающей среды.
Другой разновидностью тактильных датчиков является пьезорезистивный
чувствительный элемент. Он изготавливается из материалов, чье электрическое сопротивление зависит от приложенного механического напряжения или давления. К таким материалам относятся проводящие эластомеры или пасты, чувствительные изменению давления. Проводящие эластомеры изготавливаются из силиконовой резины, полиуретана и других материалов, в состав которых входят проводящие частицы или волокна. Например, проводящая резина получается при введении в обычную резину угольного порошка. Принцип действия эластомерных датчиков основан либо на изменении площади контактов при сдавливании эластомера между двумя проводящими пластинами, либо на изменении толщины эластомерного слоя. В зависимости от величины внешней силы, действующей на датчик, меняется площадь контактной зоны между прижимным устройством и эластомером, в результате чего изменяется электрическое сопротивление.
Более тонкие пьезорезистивные тактильные датчики получаются из полупроводниковых полимеров, сопротивление которых также зависит от давления. Конструкция таких датчиков напоминает мембранный переключатель. По сравнению с тензодатчиками пьезорезистивные чувствительные элементы обладают более широким динамическим диапазоном.
Пьезоэлектрические датчики силы
 Рассмотренные пьезоэлектрические тактильные датчики не предназначены для проведения точных измерений силы. Однако на основе того же пьезоэлектрического эффекта можно реализовать и прецизионные датчики силы, как активные, так и пассивные. При разработке таких датчиков всегда следует помнить, что пьезоэлектрические устройства не могут измерять стационарные процессы. Это означает, что пьезоэлектрические датчики силы преобразуют изменения силы в переменный электрический сигнал, но при этом они никак не реагируют на постоянное значение внешней силы. Поскольку приложенные силы могут изменять некоторые свойства материалов, при разработке активных датчиков необходимо учитывать всестороннее влияние сигналов возбуждения. На рис. 4 показан вариант активного датчика силы. При проведении количественных измерений при помощи таких датчиков следует помнить, что его диапазон измерения зависит от частоты механического резонанса применяемого пьезоэлектрического кристалла. Принцип действия таких датчиков основан на том, что при механической нагрузке кварцевых кристаллов определенных срезов, используемых в качестве резонаторов в электронных генераторах, происходит сдвиг их резонансной частоты.
Рассмотренные пьезоэлектрические тактильные датчики не предназначены для проведения точных измерений силы. Однако на основе того же пьезоэлектрического эффекта можно реализовать и прецизионные датчики силы, как активные, так и пассивные. При разработке таких датчиков всегда следует помнить, что пьезоэлектрические устройства не могут измерять стационарные процессы. Это означает, что пьезоэлектрические датчики силы преобразуют изменения силы в переменный электрический сигнал, но при этом они никак не реагируют на постоянное значение внешней силы. Поскольку приложенные силы могут изменять некоторые свойства материалов, при разработке активных датчиков необходимо учитывать всестороннее влияние сигналов возбуждения. На рис. 4 показан вариант активного датчика силы. При проведении количественных измерений при помощи таких датчиков следует помнить, что его диапазон измерения зависит от частоты механического резонанса применяемого пьезоэлектрического кристалла. Принцип действия таких датчиков основан на том, что при механической нагрузке кварцевых кристаллов определенных срезов, используемых в качестве резонаторов в электронных генераторах, происходит сдвиг их резонансной частоты.
Cтраница 1
Датчики касания используются просто для обнаружения факта контакта с объектом. Датчиком касания может служить простейший микровыключатель. Датчики механических напряжений используются для измерения величины силы, возникающей в месте контакта. Обычно в качестве сенсоров, измеряющих усилия, применяют тензодатчики.
В токарных станках датчики касания применяются для контроля размеров заготовки, обработанной детали и режущей кромки инструмента. Вопросы диагностирования роботов (применяются антропоморфные и портальные роботы, встроенные в токарный станок, и внешние, работающие в цилиндрической системе координат) рассмотрены в гл.
Для измерения износа прямыми методами применяют датчики касания, которые регистрируют либо размерный износ, либо, при их перемещении, износ по задней поверхности. Конструкция датчика приведена на рис. 4.8, а. Корпус 4 закрепляется на подвижном узле / станка. В обмотке электромагнита создается переменное магнитное поле, вызывающее колебания наконечника. При касании наконечником блока его колебания нарушаются, что регистрируется электронной системой 8 с усилителем 7, а координаты соответствуют измеряемому размеру. Датчик защищают от стружки. Его применяют на станках с ЧПУ и в ГПС не только для измерения износа, но и для определения фактических координат вершины лезвия инструмента с целью автоматической корректировки управляющих программ.
Принцип работы проволочного тактильного датчика (датчика касания) показан на рис. 5.26. Робот автоматически по координатам двух базовых точек А и В, определяемых тактильным датчиком на угловом соединении, по скорректированной программе отыскивает требуемое место начала сварки (точку С), если отклонение стыкового соединения от исходного положения вызвано его параллельным смещением. В случае, если смещение стыкового соединения от исходного положения вызвано его параллельным смещением с разворотом относительно точки сварки, то для корректировки программы позиционирования роботом горелки в начальную точку сварки необходимо определить датчиком координаты как минимум трех базовых точек на элементах соединения.
Нулевые головки обычно конструируются на базе датчиков касания, в качестве которых широко используются электро -, радио — и виброконтактные датчики. Эти головки, называемые еще головками касания, делятся на два класса: с изменяющимся и фиксированным нулевым положением измерительного наконечника.
Рассмотрим особенности укзззнных выше устройств при использовании их в качестве датчика касания в специфических условиях цеха ртутного электролиза.
Очувствление схватов и других исполнительных органов манипулятора выполняют датчики захватного усилия 6 и датчики касания 7 при взаимодействии ПР с внешней средой.
Сварочная часть ПР включает: сварочный выпрямитель; сварочную горелку; кронштейны крепления; механизм подачи сварочной проволоки; датчик касания заготовки для сварки; устройство управлением датчика касания; необходимое количество кабелей; баллон с инертным газом, редуктор с расходомером и подогревателем газа; шланги и рукава.
О том, как прикрутить к микроконтроллеру ёмкостный сенсор прикосновения. Эта идея показалась мне довольно перспективной, некоторым приборам сенсорные клавиши подошли бы куда лучше механических. В этой статье я расскажу о своей реализации этой полезной технологии на основе отладочной платы STM32 Discovery.
Итак, только начав осваивать STM32, я решил в качестве упражнения добавить устройству способность определять прикосновения. Начав разбираться с теорией и практикой по вышеупомянутой статье, я повторил схему товарища «a. Она работала идеально, но мне, любителю минимализма, захотелось её упростить, избавившись от лишних элементов. Лишними на мой взгляд оказались внешний резистор и дорожка к питанию. Всё это уже есть в большинстве микроконтроллеров, в том числе в AVR и в STM32. Я имею в виду подтягивающие резисторы портов ввода/вывода. Почему бы не заряжать пластинку и наши пальцы через них? В ожидании подвоха я собрал на макетке схему, которая, к моему удивлению, заработала с первого же раза. Собственно говоря, схемой это называть даже смешно, ведь всё что нам нужно — это просто подсоединить контактную пластинку к ножке отладочной платы. Всю работу на себя возьмёт микроконтроллер.
Что же из себя представляет программа? Во первых две функции:
Первая выводит на ножку сенсора (нулевой пин регистра C) логический «0»
Void Sensor_Ground (void)
{
GPIOC->CRL = 0x1;
GPIOC->BRR |= 0x1;
}
Вторая настраивает тот же вывод на вход, с подтяжкой к питанию.
Void Sensor_InPullUp (void)
{
GPIOC->CRL = 0x8;
GPIOC->BSRR |= 0x1;
}
Теперь в начале цикла опроса вызовем Sensor_Ground(), и подождём некоторое время чтобы разрядить на землю весь остаточный заряд на сенсоре. Затем обнулим переменную count, которой будем считать время зарядки сенсора и вызовем Sensor_InPullUp().
Sensor_Ground();
Delay(0xFF); //простой пустой счётчик
count = 0;
Sensor_InPullUp();
Теперь сенсор начинает заряжаться через внутренний подтягивающий резистор номиналом порядка десятков КОм (30..50КОм у STM32). Постоянная времени такой цепи будет равняться считанным тактам, поэтому я поменял кварцевый резонатор на отладочной плате на более быстрый, 20МГц (кстати, я не сразу заметил, что оказывается на STM32 Discovery кварц меняется без пайки). Итак считаем такты процессора, пока на входе не появится логическая единица:
While(!(GPIOC->IDR & 0x1))
{
count++;
}
После выхода из этого цикла в переменной count будет храниться число, пропорциональное ёмкости сенсорной пластинки. В моём случае с чипом на 20МГц значение count равняется 1 при отсутствии нажатия, 7-10 при самом лёгком касании, 15-20 при нормальном прикосновении. Остаётся лишь сравнить её с пороговым значением и не забыть снова вызвать Sensor_Ground(), чтобы к следующему циклу опроса сенсор уже был разряжен.
Полученной чувствительности хватает для уверенного определения прикосновений к голым металлическим площадкам. При прикрытии сенсора листом бумаги или пластика чувствительность падает в три — четыре раза, хорошо определяются только уверенные нажатия. Чтобы увеличить чувствительность в случае, когда сенсор необходимо прикрыть защитным материалом, можно повысить тактовую частоту микроконтроллера. С чипом серии STM32F103, способном работать на частотах до 72МГц, помехой не будут и миллиметровые преграды между пальцем и сенсором.
По сравнению с реализацией «a, мой подход работает гораздо быстрее (порядка десятка тактов на опрос одного сенсора), поэтому я не стал усложнять программу, настраивая прерывания по таймеру.
Напоследок видео с демонстрацией работы сенсора.
Main.c тестовой программы.
На микроконтроллер
Cпасибо пользователю за очень полезную статью ARM-микроконтроллеры STM32F. Быстрый старт c STM32-Discovery , пользователю за идею и доходчивое теоретическое описание.
UPD. После комментариев «a я решил разобраться с тактированием и обнаружил, что по умолчанию STM32 Discovery настроен на тактовую частоту
(HSE / 2) * 6 = 24 MHz, где HSE — частота внешнего кварца. Соответственно поменяв кварц с 8 на 20 МГц, я заставил бедную STM»ку работать на 60 МГц. Так что во-первых, некоторые из выводов очевидно не совсем верны, во-вторых то чем я занимался может привести к сбоям чипа. На случай таких сбоев в микроконтроллере есть HardFault прерывание, воспользовавшись им, я проверил более высокие частоты. Так вот, сбоить чип начинает только на 70 МГц. Но хотя эту конкретную программу контроллер переваривает на 60МГц, при использовании периферии или работе с Flash памятью он может повести себя непредсказуемо. Вывод: относитесь к данному топику как к эксперименту, повторяйте только на свой страх и риск.
Емкостной датчик – это один из типов бесконтактных датчиков, принцип работы которого основан на изменении диэлектрической проницаемости среды между двух обкладок конденсатора. Одной обкладкой служит сенсорный датчик схемы в виде металлической пластины или провода, а второй – электропроводящее вещество, например, металл, вода или тело человека.
При разработке системы автоматического включения подачи воды в унитаз для биде возникла необходимость применения емкостного датчика присутствия и выключателя, обладающих высокой надежностью, устойчивостью к изменению внешней температуры, влажности, пыли и питающему напряжению. Хотелось также исключить необходимость прикосновения человека с органами управления системы. Предъявляемые требования могли обеспечить только схемы сенсорных датчиков, работающих на принципе изменения емкости. Готовой схемы удовлетворяющей необходимым требованиям не нашел, пришлось разработать самостоятельно.
Получился универсальный емкостной сенсорный датчик, который не требует настройки и реагирует на приближающиеся электропроводящие предметы, в том числе и человека, на расстояние до 5 см. Область применения предлагаемого сенсорного датчика не ограничена. Его можно применять, например, для включения освещения, систем охранной сигнализации, определения уровня воды и в многих других случаях.
Электрические принципиальные схемы
Для управления подачей воды в биде унитаза понадобилось два емкостных сенсорных датчика. Один датчик нужно было установить непосредственно на унитазе, он должен был выдавать сигнал логического нуля при присутствии человека, а при отсутствии сигнал логической единицы. Второй емкостной датчик должен был служить включателем воды и находиться в одном из двух логических состояний.
При поднесении к сенсору руки датчик должен был менять логическое состояние на выходе – из исходного единичного состояния переходить в состояние логического нуля, при повторном прикосновении руки из нулевого состояния переходить в состояние логической единицы. И так до бесконечности, пока на сенсорный включатель поступает разрешающий сигнал логического нуля с сенсорного датчика присутствия.
Схема емкостного сенсорного датчика
Основой схемы емкостного сенсорного датчика присутствия является задающий генератор прямоугольных импульсов, выполненный по классической схеме на двух логических элементах микросхемы D1.1 и D1.2. Частота генератора определяется номиналами элементов R1 и C1 и выбрана около 50 кГц. Значение частоты на работу емкостного датчика практически не влияет. Я менял частоту от 20 до 200 кГц и влияния на работу устройства визуально не заметил.
С 4 вывода микросхемы D1.2 сигнал прямоугольной формы через резистор R2 поступает на входы 8, 9 микросхемы D1.3 и через переменный резистор R3 на входы 12,13 D1.4. На вход микросхемы D1.3 сигнал поступает с небольшим изменением наклона фронта импульсов из-за установленного датчика, представляющего собой кусок провода или металлическую пластину. На входе D1.4, из за конденсатора С2, фронт изменяется на время, необходимое для его перезаряда. Благодаря наличию подстроечного резистора R3, есть возможность фронты импульса на входе D1.4, выставить равным фронту импульса на входе D1.3.
Если приблизить к антенне (сенсорному датчику) руку или металлический предмет, то емкость на входе микросхемы DD1.3 увеличится и фронт поступающего импульса задержатся во времени, относительно фронта импульса, поступающего на вход DD1.4. чтобы «уловить» эту задержку про инвертированные импульсы подаются на микросхему DD2.1, представляющую собой D триггер, работающий следующим образом. По положительному фронту импульса, поступающего на вход микросхемы C, на выход триггера передается сигнал, который в тот момент был на входе D. Следовательно, если сигнал на входе D не изменяется, поступающие импульсы на счетный вход C не оказывают влияния на уровень выходного сигнала. Это свойство D триггера и позволило сделать простой емкостной сенсорный датчик.
Когда емкость антенны, из за приближения к ней тела человека, на входе DD1.3 увеличивается, импульс задерживается и это фиксирует D триггер, изменяя свое выходное состояние. Светодиод HL1 служит для индикации наличия питающего напряжения, а HL2 для индикации приближения к сенсорному датчику.
Схема сенсорного включателя
Схему емкостного сенсорного датчика можно использовать и для работы сенсорного включателя, но с небольшой доработкой, так как ему необходимо не только реагировать на приближение тела человека, но и оставаться в установившемся состоянии после удаления руки. Для решения этой задачи пришлось к выходу сенсорного датчика добавить еще один D триггер, DD2.2, включенный по схеме делителя на два.
Схема емкостного датчика была немного доработана. Для исключения ложных срабатываний, так как человек может подносить и удалять руку медленно, из-за наличия помех датчик может выдавать на счетный вход D триггера несколько импульсов, нарушая необходимый алгоритм работы включателя. Поэтому была добавлена RC цепочка из элементов R4 и C5, которая на небольшое время блокировала возможность переключение D триггера.

Триггер DD2.2 работает так же, как и DD2.1, но сигнал на вход D подается не с других элементов, а с инверсного выхода DD2.2. В результате по положительному фронту импульса, приходящего на вход С сигнал на входе D изменяется на противоположный. Например, если в исходном состоянии на выводе 13 был логический ноль, то поднеся руку к сенсору один раз, триггер переключится и на выводе 13 установится логическая единица. При следующем воздействии на сенсор, на выводе 13 опять установится логический ноль.
Для блокировки включателя при отсутствии человека на унитазе, с сенсора на вход R (установка нуля на выходе триггера вне зависимости от сигналов на всех остальных его входах) микросхемы DD2.2 подается логическая единица. На выходе емкостного выключателя устанавливается логический ноль, который по жгуту подается на базу ключевого транзистора включения электромагнитного клапана в Блоке питания и коммутации.
Резистор R6, при отсутствии блокирующего сигнала с емкостного датчика в случае его отказа или обрыва управляющего провода, блокирует триггер по входу R, тем самым исключает возможность самопроизвольной подачи воды в биде. Конденсатор С6 защищает вход R от помех. Светодиод HL3 служит для индикации подачи воды в биде.
Конструкция и детали емкостных сенсорных датчиков
Когда я начал разрабатывать сенсорную систему подачи воды в биде, то наиболее трудной задачей мне казалась разработка емкостного датчика присутствия. Обусловлено это было рядом ограничений по установке и эксплуатации. Не хотелось, чтобы датчик был механически связан с крышкой унитаза, так как ее периодически надо снимать для мойки, и не мешал при санитарной обработке самого унитаза. Поэтому и выбрал в качестве реагирующего элемента емкость.
Сенсорного датчика присутствия
По выше опубликованной схеме сделал опытный образец. Детали емкостного датчика собраны на печатной плате, плата размещена в пластмассовой коробке и закрывается крышкой. Для подключения антенны в корпусе установлен одноштырьковый разъем, для подачи питающего напряжения и сигнала установлен четырех контактный разъем РШ2Н. Соединена печатная плата с разъемами пайкой медными проводниками в фторопластовой изоляции.

Сенсорный емкостной датчик собран на двух микросхемах КР561 серии, ЛЕ5 и ТМ2. Вместо микросхемы КР561ЛЕ5 можно применить КР561ЛА7. Подойдут и микросхемы 176 серии, импортные аналоги. Резисторы, конденсаторы и светодиоды подойдут любого типа. Конденсатор С2, для стабильной работы емкостного датчика при эксплуатации в условиях больших колебаниях температуры окружающей среды нужно брать с малым ТКЕ.
Установлен датчик под площадкой унитаза, на которой установлен сливной бачек в месте, куда в случае протечки из бачка вода попасть не сможет. К унитазу корпус датчика приклеен с помощью двустороннего скотча.
Антенный датчик емкостного сенсора представляет собой отрезок медного многожильного провода длинной 35 см в изоляции из фторопласта, приклеенного с помощью прозрачного скотча к внешней стенке чаши унитаза на сантиметр ниже плоскости очка. На фотографии сенсор хорошо виден.

Для настойки чувствительности сенсорного датчика необходимо после его установки на унитаз, изменяя сопротивление подстроечного резистора R3 добиться, чтобы светодиод HL2 погас. Далее положить руку на крышку унитаза над местом нахождения сенсора, светодиод HL2 должен загораться, если руку убрать, потухнуть. Так как бедро человека по массе больше руки, то при эксплуатации сенсорный датчик, после такой настройки, будет работать гарантировано.
Конструкция и детали емкостного сенсорного включателя
Схема емкостного сенсорного включателя имеет больше деталей и для их размещения понадобился корпус большего размера, да и по эстетическим соображениям, внешний вид корпуса, в котором был размещен сенсорный датчик присутствия не очень подходил для установки на видном месте. Внимание на себя обратила настенная розетка rj-11 для подключения телефона. По размерам она подходила и имела хороший внешний вид. Удалив из розетки все лишнее, разместил в ней печатную плату емкостного сенсорного выключателя.

Для закрепления печатной платы в основании корпуса была установлена короткая стойка и к ней с помощью винта прикручена печатная плата с деталями сенсорного выключателя.

Датчик емкостного сенсора сделал, приклеив ко дну крышки розетки клеем «Момент» лист латуни, предварительно вырезав в них окошко для светодиодов. При закрывании крышки, пружина (взята от кремневой зажигалки) соприкасается с латунным листом и таким образом обеспечивается электрический контакт между схемой и сенсором.

Крепится емкостной сенсорный включатель на стену с помощью одного самореза. Для этого в корпусе предусмотрено отверстие. Далее устанавливается плата, разъем и закрепляется защелками крышка.

Настройка емкостного выключателя практически не отличается от настройки сенсорного датчика присутствия, описанного выше. Для настойки нужно подать питающее напряжение и резистором отрегулировать, чтобы светодиод HL2 загорался, когда к датчику подносится рука, и гас, при ее удалении. Далее нужно активировать сенсорный датчик и поднести и удалить руку к сенсору выключателя. Должен мигнуть светодиод HL2 и загореться красный светодиод HL3. При удалении руки красный светодиод должен продолжать светиться. При повторном поднесении руки или удалении тела от датчика, светодиод HL3 должен погаснуть, то есть выключить подачу воды в биде.
Универсальная печатная плата
Представленные выше емкостные датчики собраны на печатных платах, несколько отличающихся от печатной платы приведенной ниже на фотографии. Это связано с объединением обеих печатных плат в одну универсальную. Если собирать сенсорный включатель, то необходимо только перерезать дорожку под номером 2. Если собирать сенсорный датчик присутствия, то удаляется дорожка номер 1 и не все элементы устанавливаются.

Не устанавливаются элементы, необходимые для работы сенсорного включателя, но мешающие работе датчика присутствия, R4, С5, R6, С6, HL2 и R4. Вместо R4 и С6 запаиваются проволочные перемычки. Цепочку R4, С5 можно оставить. Она не будет влиять на работу.
Ниже приведен рисунок печатной платы для накатки при использовании термического метода нанесения на фольгу дорожек.
Достаточно распечатать рисунок на глянцевой бумаге или кальке и шаблон готов для изготовления печатной платы.
Безотказная работа емкостных датчиков для сенсорной системы управления подачи воды в биде подтверждена на практике в течении трех лет постоянной эксплуатации. Сбоев в работе не зафиксировано.
Однако хочу заметить, что схема чувствительна к мощным импульсным помехам. Мне приходило письмо о помощи в настройке. Оказалось, что во время отладки схемы рядом находился паяльник с тиристорным регулятором температуры. После выключения паяльника схема заработала.
Еще был такой случай. Емкостной датчик был установлен в светильник, который подключался в одну розетку с холодильником. При его включении свет включался и при повторном выключался. Вопрос был решен подключением светильника в другую розетку.
Приходило письмо об успешном применении описанной схемы емкостного датчика для регулировки уровня воды в накопительном баке из пластика. В нижней и верхней части было приклеено силиконом по датчику, которые управляли включением и выключением электрического насоса.
Ультразвуковой датчик
Ультразвуковой сенсор — один из двух сенсоров, заменяющих роботу зрение. Ультразвуковой сенсор позволяет роботу видеть и обнаруживать объекты. Его также можно использовать для того, чтобы робот мог обойти препятствия, оценить и измерить расстояние, а также зафиксировать движение объекта.
Показания ультразвукового датчика измеряется в сантиметрах и дюймах. Он может измерять расстояние от 0 до 255 сантиметров с точностью +/-3 см. Ультразвуковой сенсор работает по тому же принципу, что и локатор летучей мыши: он измеряет расстояние путем расчета времени, которое потребовалось звуковой волне для возвращения после отражения от объекта, подобно эху.
Крупные объекты с твердыми поверхностями определяются лучше всего. Объекты из мягких материалов (тканей) или округлые (мяч), а также слишком тонкие, маленькие и т.п., могут создавать для сенсора определенные затруднения при работе.
Следует помнить, что два и более ультразвуковых датчика, работающих в одном помещении, могут интерферировать и снижать точность результатов
К примерам применения ультразвуковых датчиков расстояния можно отнести использования в машинах для предупреждающих сигналов водителю или автоматический контроль по сигналам от датчиков, идентифицирующих опасные ситуации, объединяемых в сетевые связи, с человеко-машинным интерфейсом human — machine interface (HMI).
Рис.1
В основе ультразвукового принципа обнаружения препятствий лежит принцип эха. В состав датчика входят два преобразователя: один преобразователь излучает ультразвуковые волны, а отраженные волны обнаруживаются другим, одним или более, преобразователем. Тот же самый преобразователь, который передает ультразвуковые волны, может быть использован и для обнаружения отраженной волны. Основное назначение датчиков — обнаруживать присутствие или отсутствие препятствия, но данный принцип (time of flight) позволяет также по времени возвращения эха при известной скорости распространения звука рассчитывать расстояние до объекта.
Ультразвук представляет собой не что иное, как вибрацию на частоте > 20 кГц. Большинство коммерчески доступных преобразователей работает на частотах в диапазоне 40-250 кГц.
Вариации акустических параметров датчиков, окружающая среда и различные цели значительно влияют на работу устройств .
В ультразвуковом датчике преобразователь генерирует короткий импульс, направляемый на цель и возвращающийся обратно
Важно, что скорость звука является функцией состава и температуры среды (воздуха) и влияет на точность и разрешение датчика. Точность измерений расстояния прямо пропорциональна точности значения скорости звука, используемого в вычислениях, и варьируется в реальных условиях от 345 м/c при комнатной температуре до более чем 380 м/c при температуре порядка 70 °C. Длина звуковой волны
является функцией скорости ультразвука c и взаимосвязана с его частотой ѓ, поэтому эти параметры (длина волны и частота) также влияют на разрешение и точность, а также минимальный размер целей и диапазон расстояний, измеряемых датчиком.
Затухание звука является функцией частоты и влажности, что влияет на максимальное расстояние, детектируемое датчиком. Длинные волны (с меньшей частотой) характеризуются меньшим затуханием. На частотах свыше 125 кГц максимальное затухание случается при относительной влажности 100%, на частотах 40 кГц — уже при влажности в 50%. Так как датчик должен работать при любых значениях влажности, в расчетах используется максимальное затухание для каждой частоты.
Фоновые шумы являются функцией частоты и уменьшаются с ее увеличением, также оказывая влияние на максимально детектируемое расстояние и минимальный размер цели. Разрешение и точность на высоких частотах выше, тогда как диапазон выше с более длинными волнами.
Датчик касания
Датчик касания это кнопка, у которой возможно два состояния — нажато и отжато. Программно датчик распознает еще одно состояние Касание.
Увидеть на экране дисплея реакцию датчика касания можно в режиме Просмотра. При не нажатой кнопке датчика на дисплее появляется 0, а при нажатой — 1.
Добавив в конструкцию робота датчик касания (например в виде бампера) вы можете сделать так, чтобы робот изменил поведение при активации датчика.
Датчик касания является одним из органов осязания для роботов, что делает его необходимым там где требуется реакция робота на объекты.
Датчик касания позволяет роботу осуществлять прикосновения.
Сенсор нажатия может определить момент нажатия на него чего-либо, а так же момент освобождения.
Датчик касания представлен на рис.2.
Рис.2 Датчик касания
Микрометр
Для замера холостого хода у датчика касания необходим микрометр (или Индикатор часового типа) ИЧ-25 который будет измерять расстояние прошедшее датчиком до момента срабатывания.
ИЧ-25 предназначен для измерения линейных размеров абсолютным и относительным методами, определения величины отклонений от заданной геометрической формы и взаимного расположения поверхностей.
На рис.3 представлены несколько видов индикаторов.

Рис.3.
Параметры микрометра ИЧ 25:
Диапазон измерений 0-25 мм.
Цена деления 0.01 мм.
Габариты 159х85х51 мм.
Емкостной датчик прикосновений
Основным элементом, необходимым для реализации системы емкостных датчиков является конденсатор переменной емкости. Он должен иметь простую конструкцию и чувствительность к прикосновениям. Так как чувствительный элемент построен как «открытый» конденсатор, электрическое поле может взаимодействовать с внешним емкостным объектом, в нашем случае — пальцем. На рисунке 1 показан вид сверху и сбоку емкостного датчика, реализованного непосредственно на плате.

Рис. 1.
Как показано на рисунке 1, конденсатор образуется между проводящим слоем и заземлением. Взаимодействие проводящего слоя и окружающих его проводников создают базовую емкость, величина которой может быть измерена. Базовая емкость такого датчика составляет около 10 пФ. Когда проводник, т.е. палец, приближается к открытому конденсатору, в результате интерференции электрического поля, изменяется емкость конденсатора. Из-за емкости пальца, емкость датчика увеличивается даже без прикосновения. С помощью измерения емкости датчика и сравнивания каждого результата с базовой емкостью, микроконтроллер может определить не только факт нажатия кнопки, но и последовательность включений, что используется для реализации более сложных интерфейсов, таких как слайдеры.
Чувствительность датчика зависит от расстояния между проводящим и заземляющим слоем. Рекомендованное расстояние — 0,5 мм. Кроме этого, общая чувствительность системы зависит от толщины платы: при уменьшении толщины платы уменьшается чувствительность. Рекомендованная толщина платы 1…1,5 мм.
Емкость датчика без емкости пальца составляет около 5…10 пФ.
Заземляющий слой под датчиком экранирует его от других электронных компонентов системы. Он также способствует поддержанию постоянной базовой емкости, которая требуется как опорная при каждом измерении.
Конструкция датчика и интерфейса с пользователем
Полный интерфейс состоит из самого емкостного датчика (реализованного на плате), а также из диэлектрика между датчиком и пальцем при его прикосновении.
Реализация емкостного датчика на печатной плате
Зависимости емкостного датчика могут быть отображены на примере обычного плоского конденсатора. Рисунок 2 отображает его ключевые элементы.

Рис. 2.
Под термином «базовая емкость» понимается результат измерения емкости датчика, который не был подвержен никакому воздействию. Для простоты в качестве базовой емкости возьмем емкость конденсатора, образованного проводящим слоем в верхней части печатной платы и заземляющим — в нижней (нижняя и верхняя пластины на рисунке 2).
Расстояние d определяется самой печатной платой. Как сказано ранее, при уменьшении d, увеличивается базовая емкость и уменьшается чувствительность. Удельные емкости пространства (e 0) и материала (e r) определяют диэлектрическую постоянную платы.
Площадь датчика A обычно ограничена размерами пальца, рассчитывается как среднее между пальцем ребенка и взрослого. Нужно обратить внимание, что площадь датчика, которую не перекрывает палец, является бесполезной.
Таким образом, в процессе разработки нужно минимизировать базовую емкость датчика. Условием хорошей чувствительности и надежности системы является максимизация изменения емкости при приближении пальца к датчику. Конечно, эти две цели взаимоисключающие: при увеличении площади датчика до размеров пальца увеличивается базовая емкость, так как она пропорциональна А.

Рис. 3.
На рисунке 3 показано расположение кнопок и слайдера, используемое в качестве примера в этом документе.

Рис. 4. Построение слоев (красный — верхний сигнальный слой, синий — нижний заземляющий слой)
На рисунке 4 показаны четыре варианта размещения датчика на печатной плате, отличающиеся по построению заземляющего слоя.
Вверху слева отображен только верхний сигнальный слой: четыре прокладки датчика, окруженные верхним заземляющим слоем; нижний слой не используется. В верхней правой части рисунка показан такой же дизайн платы с заполнением заземляющего слоя 25%. Внизу слева — версия с 50% и справа — 100% заполнением.
Рекомендуется использовать несколько заземляющих слоев под каждым датчиком для изоляции элементов датчика от шума и других внешних изменений, способных вызвать изменение базовой емкости. Очевидно, что 100% заполнение, как показано в левом нижнем углу рисунка 4, обеспечивает максимальную шумовую изоляцию, а также увеличивает базовую емкость. Для получения оптимального соотношения шумовой изоляции и базовой емкости, принято использовать заполнение от 50% до 75%.
Изоляционный слой датчика
В этом типе приложения изоляционный слой датчика выполняется из пластика. Благодаря этому слою, пальцы не контактируют непосредственно с датчиком. Модель, представленная на рисунке 2, может быть использована для визуализации интерфейса взаимодействия пальца и конденсатора. При этом нижняя обкладка выступает в роли датчика, а верхняя — палец пользователя. Становится ясным, что при увеличении площади взаимодействия до размеров пальца, увеличивается А, максимизируется изменение емкости. При увеличении слоя изоляции d, изменение емкости уменьшается обратнопропорционально. Ключевой момент, который нельзя игнорировать, это материал из которого выполняется изоляция. Диэлектрическая постоянная изоляционного материала, а так же его толщина очень сильно влияют на чувствительность и простоту использования емкостного датчика прикосновений. В таблице 1 представлены диэлектрические постоянные некоторых материалов.
Таблица 1. Диэлектрические постоянные материалов
Кроме самого изолятора, важным моментом является соединение датчика и изолятора. Если соединение не плотное и имеются промежутки, емкость датчика изменится. Поэтому часто используются клейкие изоляторы.
Использование MSP430 для измерения емкости датчика прикосновений
Теперь рассмотрим два метода измерения емкости датчика прикосновений.
Метод измерения на основе осциллятора
Первый метод основан на использовании осциллятора. Реализовать этот метод можно на базе MSP430, с использованием его компаратора и емкостного датчика в качестве элемента настройки. Любые изменения емкости датчика приведут к изменению частоты, которая может быть измерена с помощью таймера Timer_A микроконтроллера MSP430. На рисунке 5 показан пример такой системы.

Рис. 5.
Резисторы R создают опору для компаратора, когда на Px.y установлен высокий уровень. Этот сигнал противоположен по полярности сигналу зарядки или разрядки емкости датчика (C sensor), что приводит к длительным осцилляциям. При равных значениях сопротивления R граничные значения составляют 1/3 V cc и 2/3 V cc , частота осцилляций вычисляется по формуле:
f OSC = 1/
Подсчитав число периодов осцилляций в течение заданного промежутка времени, можно вычислить частоту и измерить емкость. В рассматриваемом приложении сопротивление резистора R C составляет 100 кОм. В результате частота осцилляций равна приблизительно 600 кГц при емкости датчика 10 пФ.
В качестве источника тактового сигнала используется интегрированный 12 килогерцовый VLO. Этот сигнал подается на сторожевой таймер WDT. С каждым прерыванием сторожевого таймера ядро анализирует состояние регистра таймера Timer_A, TAR. Вычисляется разница двух последних значений регистра. В реальности абсолютное значение емкости не нужно, интересно только ее изменение.
Возможно построение системы с несколькими емкостными датчиками. Для этого требуется построение мультиплексора на компараторе Comparator_A+ (рисунок 6).

Рис. 6.
Для реализации системы требуется по одному резистору на каждый датчик и три резистора для компаратора.
Метод измерения емкости на основе резистора
Второй метод измерения емкости датчика прикосновений основан на использовании внешнего резистора для зарядки или разрядки емкостного датчика. Для зарядки или разрядки используется один из портов MSP430, время заряда или разряда измеряется с помощью встроенного таймера Timer_A. На рисунке 7 изображен пример системы с использованием микроконтроллера MSP430 для измерения времени разряда конденсатора.

Рис. 7.
При значении емкости C sensor = 10 пФ и R = 5,1 М время разрядки составляет около 250 мкс. Px.y конфигурируется как выход с высоким уровнем для зарядки конденсатора. Он может быть переконфигурирован как вход, для разряда C sensor через R. Максимальный ток через порт MSP430 составляет ±50 нА.
Если порт Px.y поддерживает работу с прерываниями (у MSP430 это порты P1.x и P2.x), внутренний сигнал низкого уровня может использоваться как порог, при достижении которого они генерируются. При получении этого прерывания, ядро анализирует содержимое регистра таймера Timer_A. Таймер может использовать в качестве источника тактового сигнала внутренний DCO. Частота генерируемого сигнала при этом составляет 8 или 16 МГц (в зависимости от семейства MSP430).

Рис. 8.
На рисунке 8 показан один измерительный цикл. Таймер начинает отсчет с нуля и в момент, когда напряжение на датчике достигает порога V IT , значение таймера считывается. Также таймер может работать в режиме постоянного счета, при этом нужно производить считывание его значений в момент начала и конца разряда конденсатора и вычислять их разницу. При увеличении емкости датчика возрастает время разряда конденсатора и увеличивается число циклов таймера за время измерения.
Выше говорилось, что для каждого порта нужен один резистор. Схему можно упростить, если использовать один резистор для двух портов. Во время измерения емкости одного из датчиков порт, подключенный ко второму должен иметь низкий уровень сигнала, т.е. служит заземлением для разрядки емкости. Другое достоинство такой схемы в том, что емкость каждого датчика может быть измерена в двух направлениях: зарядка от нуля до высокого уровня и разрядка от V cc до порога низкого уровня. На рисунке 9 показан этот метод.

Рис. 9.
Подсчет тактов нужно производить два раза: во время заряда и разряда. При этом шум 50/60 МГц оказывает меньше влияния на результат измерения.
Программное обеспечение
После того как результат измерения получен, его нужно программно интерпретировать. Шум источника питания, сдвиг частоты синхронизации, внешние 50/60 МГц шумы могут привести к неправильному принятию решения.
Иногда для эффективности можно отбросить несколько младших битов результата. Это приемлемо, если нужно отслеживать только факт нажатия кнопки. Но если требуется более высокое разрешение, этого себе позволить уже нельзя. Низкочастотная фильтрация и простое усреднение нескольких полученных результатов может помочь сгладить шумы. Но для достижения низкого энергопотребления наличие младших битов результата измерения более критично.
Отслеживание базовой емкости датчика
Без возможности динамически отслеживать изменения емкости датчика, всякого рода нестабильности могут привести к ложному обнаружению нажатия кнопки или ее «залипания». Рассмотрим вариант с простой кнопкой, которая имеет два состояния: включена/выключена. В случае если результат смещается, он может приблизиться к порогу, при достижении которого кнопка считается нажатой, то есть произойдет ложное срабатывание.
Один из методов отслеживания и подстройки базовой емкости показан на рисунке 10.
Нужно обратить внимание на то, что эти действия выполняются для каждого датчика отдельно. Вычисление переменной «Delta» и подстройка «base» производится по-разному в RO- и RC-алгоритмах. В RO измеренное значение уменьшается, когда емкость конденсатора увеличивается; а в RC измеренное значение увеличивается.
После завершения измерения, в первую очередь, нужно определить, произошло ли прикосновение. Это может быть произведено путем сравнения полученного значения с порогом, соответствующим самому легкому прикосновению, которое может быть распознано. Если определено, что прикосновения не было, базовое значение подстраивается. Каким образом происходит подстройка, зависит от того, в какую сторону произошло изменение.
При увеличении результата измерения емкости рекомендуется подстраивать базовое значение более медленно. Увеличение результата может означать не только сдвиг в результате ошибок, но и в результате движения пальца в направлении датчика. И если базовое значение подстраивается быстро, реальное прикосновение пальца может быть не замечено. Для этого рекомендуется подстраивать базовое значение только на единицу каждый цикл измерения (рисунок 10).

Рис. 10.
Реализация функции обычной кнопки
Построение кнопок является самым распространенным вариантом использования емкостных датчиков. На рисунке 11 дан пример построения системы с четырьмя кнопками.

Рис. 11.
Порог, при котором принимается решение, что кнопка нажата, должен быть выше шумов.
Реализация функции слайдера
Более сложная функция, организуемая на емкостных датчиках, слайдер. При этом нужно отслеживать превышение уже нескольких порогов.
Самый простой вариант построения слайдера можно организовать, если для каждого датчика определить несколько позиций. В примере, приведенном ниже (рисунок 12), рассматривается система, в которой для каждого датчика определено 16 позиций. В результате получается 64-позиционная система.

Рис. 12.
В качестве DELTAMAX выбирается максимальное значение емкости, которое может быть достигнуто. Затем производится деление диапазона от 0 до DELTAMAX на определенное число шагов Steps. Ноль соответствует случаю, когда кнопка не нажата. По максимальному значению определяется положение пальца. Более линейная передаточная характеристика системы достигается с помощью интерполяции значений всех датчиков.
Мультиплексирование датчиков для построения слайдера
При построении слайдера расширить число датчиков при ограниченном числе портов ввода/вывода можно посредствам мультиплексирования. При этом к одному выводу подключается несколько датчиков. Дополнительный датчик приводит только к увеличению базовой емкости. Однако, при увеличении базовой емкости, в момент воздействия только на один из датчиков, отклик датчика меньше. Поэтому, обычно вместе не соединяют более двух датчиков.
Для того, чтобы определить, какой из мультиплексированных датчиков подвергается воздействию, их нужно разнести в пространстве. Пример расположения датчиков в такой системе показан на рисунке 13.

Рис. 13.
Заключение
В статье рассмотрены два метода реализации емкостных датчиков прикосновения с использованием MSP430. Каждый из методов имеет свои достоинства и недостатки. Рассмотрим основные из них.
- Метод на основе осциллятора:
— Требуется микроконтроллер с компаратором Comp_A+;
— Число независимых датчиков ограничено количеством входов Comp_A+;
— Требуется один внешний резистор R на каждый датчик, а также цепь из трех R;
— Чувствительность ограничена потреблением мощности (программируемое время измерения);
- Метод на основе резистора:
— Может быть реализован на любом микроконтроллере MSP430;
— До 16 независимых датчиков (16 портов ввода/вывода, работающих с прерываниями);
— Один внешний резистор R на каждые два датчика;
— Чувствительность ограничена максимальной частотой микроконтроллера (фиксированное время измерения);
— Минимальное потребление энергии;
Приложение может быть расширено и оптимизировано пользователем для реализации конечного устройства.
Полное описание различных примеров применений MSP430, исходные тексты программ, дополнительную информацию можно найти на сайте www.сайт
в разделе, посвященном микроконтроллерам.
Получение технической информации, заказ образцов, поставка —
e-mail:
Новое семейство тактовых генераторов
Компания Texas Instruments представила семейство программируемых тактовых генераторов,
имеющих от 1 до 4 схем ФАПЧ. ИС позволяют генерировать до 9 тактовых сигналов, синтезируемых из одной входной частоты. Каждый выход поддерживает внутрисистемное программирование частоты до 230 МГц. Перечисленные особенности предоставляют ряд преимуществ. В их числе — пониженное потребление, более быстрый процесс проектирования и простота изменения тактовых частот без необходимости повторного проектирования системы. Эти преимущества позволят существенно снизить стоимость потребительских приложений, в т.ч. IP ТВ-приставок, IP-телефонов, цифровых медиасистем (цифровые телевизоры, устройства с потоковыми медиаданными, принтеры, навигационные системы и портативные устройства).
Новые тактовые генераторы оптимизированы на работу совместно с процессорами DaVinci TM (TI) для генерации тактовых сигналов цифровых процессоров, аудио АЦП или кодеков, а также контроллеров Ethernet или USB. Встроенный кварцевый генератор, управляемый напряжением (VCXO) позволяет выполнить частотную синхронизацию различных потоков данных.
| Состав нового семейства тактовых генераторов | ||
|---|---|---|
| Наименование | ФАПЧ | Выход, В |
| CDCE949 | 4 | 2,5/3,3 |
| CDCE937 | 3 | 2,5/3,3 |
| CDCE925 | 2 | 2,5/3,3 |
| CDCE913 | 1 | 2,5/3,3 |
| CDCEL949 | 4 | 1,8 |
| CDCEL937 | 3 | 1,8 |
| CDCEL925 | 2 | 1,8 |
| CDCEL913 | 1 | 1,8 |
О компании Texas Instruments
Емкостной датчик – это один из типов бесконтактных датчиков, принцип работы которого основан на изменении диэлектрической проницаемости среды между двух обкладок конденсатора. Одной обкладкой служит сенсорный датчик схемы в виде металлической пластины или провода, а второй – электропроводящее вещество, например, металл, вода или тело человека.
При разработке системы автоматического включения подачи воды в унитаз для биде возникла необходимость применения емкостного датчика присутствия и выключателя, обладающих высокой надежностью, устойчивостью к изменению внешней температуры, влажности, пыли и питающему напряжению. Хотелось также исключить необходимость прикосновения человека с органами управления системы. Предъявляемые требования могли обеспечить только схемы сенсорных датчиков, работающих на принципе изменения емкости. Готовой схемы удовлетворяющей необходимым требованиям не нашел, пришлось разработать самостоятельно.
Получился универсальный емкостной сенсорный датчик, который не требует настройки и реагирует на приближающиеся электропроводящие предметы, в том числе и человека, на расстояние до 5 см. Область применения предлагаемого сенсорного датчика не ограничена. Его можно применять, например, для включения освещения, систем охранной сигнализации, определения уровня воды и в многих других случаях.
Электрические принципиальные схемы
Для управления подачей воды в биде унитаза понадобилось два емкостных сенсорных датчика. Один датчик нужно было установить непосредственно на унитазе, он должен был выдавать сигнал логического нуля при присутствии человека, а при отсутствии сигнал логической единицы. Второй емкостной датчик должен был служить включателем воды и находиться в одном из двух логических состояний.
При поднесении к сенсору руки датчик должен был менять логическое состояние на выходе – из исходного единичного состояния переходить в состояние логического нуля, при повторном прикосновении руки из нулевого состояния переходить в состояние логической единицы. И так до бесконечности, пока на сенсорный включатель поступает разрешающий сигнал логического нуля с сенсорного датчика присутствия.
Схема емкостного сенсорного датчика
Основой схемы емкостного сенсорного датчика присутствия является задающий генератор прямоугольных импульсов, выполненный по классической схеме на двух логических элементах микросхемы D1.1 и D1.2. Частота генератора определяется номиналами элементов R1 и C1 и выбрана около 50 кГц. Значение частоты на работу емкостного датчика практически не влияет. Я менял частоту от 20 до 200 кГц и влияния на работу устройства визуально не заметил.
С 4 вывода микросхемы D1.2 сигнал прямоугольной формы через резистор R2 поступает на входы 8, 9 микросхемы D1.3 и через переменный резистор R3 на входы 12,13 D1.4. На вход микросхемы D1.3 сигнал поступает с небольшим изменением наклона фронта импульсов из-за установленного датчика, представляющего собой кусок провода или металлическую пластину. На входе D1.4, из за конденсатора С2, фронт изменяется на время, необходимое для его перезаряда. Благодаря наличию подстроечного резистора R3, есть возможность фронты импульса на входе D1.4, выставить равным фронту импульса на входе D1.3.
Если приблизить к антенне (сенсорному датчику) руку или металлический предмет, то емкость на входе микросхемы DD1.3 увеличится и фронт поступающего импульса задержатся во времени, относительно фронта импульса, поступающего на вход DD1.4. чтобы «уловить» эту задержку про инвертированные импульсы подаются на микросхему DD2.1, представляющую собой D триггер, работающий следующим образом. По положительному фронту импульса, поступающего на вход микросхемы C, на выход триггера передается сигнал, который в тот момент был на входе D. Следовательно, если сигнал на входе D не изменяется, поступающие импульсы на счетный вход C не оказывают влияния на уровень выходного сигнала. Это свойство D триггера и позволило сделать простой емкостной сенсорный датчик.
Когда емкость антенны, из за приближения к ней тела человека, на входе DD1.3 увеличивается, импульс задерживается и это фиксирует D триггер, изменяя свое выходное состояние. Светодиод HL1 служит для индикации наличия питающего напряжения, а HL2 для индикации приближения к сенсорному датчику.
Схема сенсорного включателя
Схему емкостного сенсорного датчика можно использовать и для работы сенсорного включателя, но с небольшой доработкой, так как ему необходимо не только реагировать на приближение тела человека, но и оставаться в установившемся состоянии после удаления руки. Для решения этой задачи пришлось к выходу сенсорного датчика добавить еще один D триггер, DD2.2, включенный по схеме делителя на два.
Схема емкостного датчика была немного доработана. Для исключения ложных срабатываний, так как человек может подносить и удалять руку медленно, из-за наличия помех датчик может выдавать на счетный вход D триггера несколько импульсов, нарушая необходимый алгоритм работы включателя. Поэтому была добавлена RC цепочка из элементов R4 и C5, которая на небольшое время блокировала возможность переключение D триггера.
Триггер DD2.2 работает так же, как и DD2.1, но сигнал на вход D подается не с других элементов, а с инверсного выхода DD2.2. В результате по положительному фронту импульса, приходящего на вход С сигнал на входе D изменяется на противоположный. Например, если в исходном состоянии на выводе 13 был логический ноль, то поднеся руку к сенсору один раз, триггер переключится и на выводе 13 установится логическая единица. При следующем воздействии на сенсор, на выводе 13 опять установится логический ноль.
Для блокировки включателя при отсутствии человека на унитазе, с сенсора на вход R (установка нуля на выходе триггера вне зависимости от сигналов на всех остальных его входах) микросхемы DD2.2 подается логическая единица. На выходе емкостного выключателя устанавливается логический ноль, который по жгуту подается на базу ключевого транзистора включения электромагнитного клапана в Блоке питания и коммутации.
Резистор R6, при отсутствии блокирующего сигнала с емкостного датчика в случае его отказа или обрыва управляющего провода, блокирует триггер по входу R, тем самым исключает возможность самопроизвольной подачи воды в биде. Конденсатор С6 защищает вход R от помех. Светодиод HL3 служит для индикации подачи воды в биде.
Конструкция и детали емкостных сенсорных датчиков
Когда я начал разрабатывать сенсорную систему подачи воды в биде, то наиболее трудной задачей мне казалась разработка емкостного датчика присутствия. Обусловлено это было рядом ограничений по установке и эксплуатации. Не хотелось, чтобы датчик был механически связан с крышкой унитаза, так как ее периодически надо снимать для мойки, и не мешал при санитарной обработке самого унитаза. Поэтому и выбрал в качестве реагирующего элемента емкость.
Сенсорного датчика присутствия
По выше опубликованной схеме сделал опытный образец. Детали емкостного датчика собраны на печатной плате, плата размещена в пластмассовой коробке и закрывается крышкой. Для подключения антенны в корпусе установлен одноштырьковый разъем, для подачи питающего напряжения и сигнала установлен четырех контактный разъем РШ2Н. Соединена печатная плата с разъемами пайкой медными проводниками в фторопластовой изоляции.
Сенсорный емкостной датчик собран на двух микросхемах КР561 серии, ЛЕ5 и ТМ2. Вместо микросхемы КР561ЛЕ5 можно применить КР561ЛА7. Подойдут и микросхемы 176 серии, импортные аналоги. Резисторы, конденсаторы и светодиоды подойдут любого типа. Конденсатор С2, для стабильной работы емкостного датчика при эксплуатации в условиях больших колебаниях температуры окружающей среды нужно брать с малым ТКЕ.
Установлен датчик под площадкой унитаза, на которой установлен сливной бачек в месте, куда в случае протечки из бачка вода попасть не сможет. К унитазу корпус датчика приклеен с помощью двустороннего скотча.
Антенный датчик емкостного сенсора представляет собой отрезок медного многожильного провода длинной 35 см в изоляции из фторопласта, приклеенного с помощью прозрачного скотча к внешней стенке чаши унитаза на сантиметр ниже плоскости очка. На фотографии сенсор хорошо виден.
Для настойки чувствительности сенсорного датчика необходимо после его установки на унитаз, изменяя сопротивление подстроечного резистора R3 добиться, чтобы светодиод HL2 погас. Далее положить руку на крышку унитаза над местом нахождения сенсора, светодиод HL2 должен загораться, если руку убрать, потухнуть. Так как бедро человека по массе больше руки, то при эксплуатации сенсорный датчик, после такой настройки, будет работать гарантировано.
Конструкция и детали емкостного сенсорного включателя
Схема емкостного сенсорного включателя имеет больше деталей и для их размещения понадобился корпус большего размера, да и по эстетическим соображениям, внешний вид корпуса, в котором был размещен сенсорный датчик присутствия не очень подходил для установки на видном месте. Внимание на себя обратила настенная розетка rj-11 для подключения телефона. По размерам она подходила и имела хороший внешний вид. Удалив из розетки все лишнее, разместил в ней печатную плату емкостного сенсорного выключателя.
Для закрепления печатной платы в основании корпуса была установлена короткая стойка и к ней с помощью винта прикручена печатная плата с деталями сенсорного выключателя.
Датчик емкостного сенсора сделал, приклеив ко дну крышки розетки клеем «Момент» лист латуни, предварительно вырезав в них окошко для светодиодов. При закрывании крышки, пружина (взята от кремневой зажигалки) соприкасается с латунным листом и таким образом обеспечивается электрический контакт между схемой и сенсором.
Крепится емкостной сенсорный включатель на стену с помощью одного самореза. Для этого в корпусе предусмотрено отверстие. Далее устанавливается плата, разъем и закрепляется защелками крышка.
Настройка емкостного выключателя практически не отличается от настройки сенсорного датчика присутствия, описанного выше. Для настойки нужно подать питающее напряжение и резистором отрегулировать, чтобы светодиод HL2 загорался, когда к датчику подносится рука, и гас, при ее удалении. Далее нужно активировать сенсорный датчик и поднести и удалить руку к сенсору выключателя. Должен мигнуть светодиод HL2 и загореться красный светодиод HL3. При удалении руки красный светодиод должен продолжать светиться. При повторном поднесении руки или удалении тела от датчика, светодиод HL3 должен погаснуть, то есть выключить подачу воды в биде.
Универсальная печатная плата
Представленные выше емкостные датчики собраны на печатных платах, несколько отличающихся от печатной платы приведенной ниже на фотографии. Это связано с объединением обеих печатных плат в одну универсальную. Если собирать сенсорный включатель, то необходимо только перерезать дорожку под номером 2. Если собирать сенсорный датчик присутствия, то удаляется дорожка номер 1 и не все элементы устанавливаются.
Не устанавливаются элементы, необходимые для работы сенсорного включателя, но мешающие работе датчика присутствия, R4, С5, R6, С6, HL2 и R4. Вместо R4 и С6 запаиваются проволочные перемычки. Цепочку R4, С5 можно оставить. Она не будет влиять на работу.
Ниже приведен рисунок печатной платы для накатки при использовании термического метода нанесения на фольгу дорожек.
Достаточно распечатать рисунок на глянцевой бумаге или кальке и шаблон готов для изготовления печатной платы.
Безотказная работа емкостных датчиков для сенсорной системы управления подачи воды в биде подтверждена на практике в течении трех лет постоянной эксплуатации. Сбоев в работе не зафиксировано.
Однако хочу заметить, что схема чувствительна к мощным импульсным помехам. Мне приходило письмо о помощи в настройке. Оказалось, что во время отладки схемы рядом находился паяльник с тиристорным регулятором температуры. После выключения паяльника схема заработала.
Еще был такой случай. Емкостной датчик был установлен в светильник, который подключался в одну розетку с холодильником. При его включении свет включался и при повторном выключался. Вопрос был решен подключением светильника в другую розетку.
Приходило письмо об успешном применении описанной схемы емкостного датчика для регулировки уровня воды в накопительном баке из пластика. В нижней и верхней части было приклеено силиконом по датчику, которые управляли включением и выключением электрического насоса.
Тач-сенсоры (датчики касания) бывают разных принципов действия, например резистивный (проводящие пленки), оптический (инфракрасный), акустический (SAW), емкостной и т.д. Данный проект является экспериментом с емкостным датчиком касания. Этот вид датчика хорошо известен как указывающее устройство, используемое в планшетных ПК и смартфонах.
Принцип емкостного датчика касания
Емкостный датчик касания обнаруживает изменение емкости, происходящее на электроде от закрытия проводящим предметом, например пальцем. Есть несколько методов измерения емкости. В этом проекте используется метод интеграции, который используется в измерителе емкости. Изменение емкости Cx довольно небольшое, около 1пФ до 10пФ, но оно будет легко обнаружено, потому что у измерителя емкости разрешение измерения составляет 20пФ. Также, объекты, которые будут обнаруживаться должны быть заземлены, чтобы создать Cx схему согласно с принципом действия. Однако она хорошо работает, даже если человеческое тело изолировано от земли. Это может быть по нижеследующей причине.
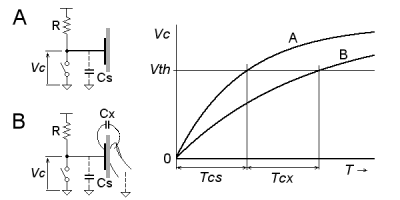
Аппаратная часть

Программное обеспечение
Во-первых, откалибруйте каждую точку (получите эталонное время связи с Cs), а затем запустите сканирование в постоянном периоде. Когда время интеграции увеличился и превысит порог, он решит “обнаружено”. Гистерезису требуется порог, или выход не будет стабильным при полу прикосновении. Время измерения для каждой точки равно времени интегрирования, так что это может быть сделано очень быстро.
Измеритель емкости измеряет время интеграции с разрешением один такт (100 нс) с аналоговым компаратором и функцией входной фиксации. Однако эта функция не доступна на всех портах ввода/вывода. Для реализации датчика касания на любом порту ввода/вывода, время интеграции измеряется опросом программным обеспечением, и разрешение становится 3 такта (375ns). В нормальном состоянии число отчета времени около 80, и это достаточно для сенсорных кнопок.
Заключение
В результате, я могу подтвердить, что емкостный сенсор может быть с легкостью реализован на обычном микроконтроллере. Пластиковая накладка может быть до 1 мм в толщину (в зависимости от диэлектрической проницаемости) для хорошей работы. Когда ATtiny2313 используется для модуля датчиков касания, она может иметь 15 точек прикосновения. Программа управления, используемая в этом проекте экспериментальна, и не проверялась в грязных условиях, таких как шумы и помехи, так что для реального использования может потребоваться любой анти-шумовой алгоритм.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| U? | МК AVR 8-бит | ATtiny2313-20PU | 1 | В блокнот | ||
| R1-R8 | Резистор | 1 МОм | 8 | В блокнот | ||
| R9-R16 | Резистор | R9-R16 | 8 | В блокнот | ||
| C1 | Электролитический конденсатор | 100 мкФ | 1 | В блокнот | ||
| C2 | Конденсатор | 100 нФ | 1 | В блокнот | ||
| D1-D8 | Светодиод | 8 |
Емкостной датчик прикосновений
Основным элементом, необходимым для реализации системы емкостных датчиков является конденсатор переменной емкости. Он должен иметь простую конструкцию и чувствительность к прикосновениям. Так как чувствительный элемент построен как «открытый» конденсатор, электрическое поле может взаимодействовать с внешним емкостным объектом, в нашем случае — пальцем. На рисунке 1 показан вид сверху и сбоку емкостного датчика, реализованного непосредственно на плате.
Рис. 1.
Как показано на рисунке 1, конденсатор образуется между проводящим слоем и заземлением. Взаимодействие проводящего слоя и окружающих его проводников создают базовую емкость, величина которой может быть измерена. Базовая емкость такого датчика составляет около 10 пФ. Когда проводник, т.е. палец, приближается к открытому конденсатору, в результате интерференции электрического поля, изменяется емкость конденсатора. Из-за емкости пальца, емкость датчика увеличивается даже без прикосновения. С помощью измерения емкости датчика и сравнивания каждого результата с базовой емкостью, микроконтроллер может определить не только факт нажатия кнопки, но и последовательность включений, что используется для реализации более сложных интерфейсов, таких как слайдеры.
Чувствительность датчика зависит от расстояния между проводящим и заземляющим слоем. Рекомендованное расстояние — 0,5 мм. Кроме этого, общая чувствительность системы зависит от толщины платы: при уменьшении толщины платы уменьшается чувствительность. Рекомендованная толщина платы 1…1,5 мм.
Емкость датчика без емкости пальца составляет около 5…10 пФ.
Заземляющий слой под датчиком экранирует его от других электронных компонентов системы. Он также способствует поддержанию постоянной базовой емкости, которая требуется как опорная при каждом измерении.
Конструкция датчика и интерфейса с пользователем
Полный интерфейс состоит из самого емкостного датчика (реализованного на плате), а также из диэлектрика между датчиком и пальцем при его прикосновении.
Реализация емкостного датчика на печатной плате
Зависимости емкостного датчика могут быть отображены на примере обычного плоского конденсатора. Рисунок 2 отображает его ключевые элементы.

Рис. 2.
Под термином «базовая емкость» понимается результат измерения емкости датчика, который не был подвержен никакому воздействию. Для простоты в качестве базовой емкости возьмем емкость конденсатора, образованного проводящим слоем в верхней части печатной платы и заземляющим — в нижней (нижняя и верхняя пластины на рисунке 2).
Расстояние d определяется самой печатной платой. Как сказано ранее, при уменьшении d, увеличивается базовая емкость и уменьшается чувствительность. Удельные емкости пространства (e 0) и материала (e r) определяют диэлектрическую постоянную платы.
Площадь датчика A обычно ограничена размерами пальца, рассчитывается как среднее между пальцем ребенка и взрослого. Нужно обратить внимание, что площадь датчика, которую не перекрывает палец, является бесполезной.
Таким образом, в процессе разработки нужно минимизировать базовую емкость датчика. Условием хорошей чувствительности и надежности системы является максимизация изменения емкости при приближении пальца к датчику. Конечно, эти две цели взаимоисключающие: при увеличении площади датчика до размеров пальца увеличивается базовая емкость, так как она пропорциональна А.

Рис. 3.
На рисунке 3 показано расположение кнопок и слайдера, используемое в качестве примера в этом документе.

Рис. 4. Построение слоев (красный — верхний сигнальный слой, синий — нижний заземляющий слой)
На рисунке 4 показаны четыре варианта размещения датчика на печатной плате, отличающиеся по построению заземляющего слоя.
Вверху слева отображен только верхний сигнальный слой: четыре прокладки датчика, окруженные верхним заземляющим слоем; нижний слой не используется. В верхней правой части рисунка показан такой же дизайн платы с заполнением заземляющего слоя 25%. Внизу слева — версия с 50% и справа — 100% заполнением.
Рекомендуется использовать несколько заземляющих слоев под каждым датчиком для изоляции элементов датчика от шума и других внешних изменений, способных вызвать изменение базовой емкости. Очевидно, что 100% заполнение, как показано в левом нижнем углу рисунка 4, обеспечивает максимальную шумовую изоляцию, а также увеличивает базовую емкость. Для получения оптимального соотношения шумовой изоляции и базовой емкости, принято использовать заполнение от 50% до 75%.
Изоляционный слой датчика
В этом типе приложения изоляционный слой датчика выполняется из пластика. Благодаря этому слою, пальцы не контактируют непосредственно с датчиком. Модель, представленная на рисунке 2, может быть использована для визуализации интерфейса взаимодействия пальца и конденсатора. При этом нижняя обкладка выступает в роли датчика, а верхняя — палец пользователя. Становится ясным, что при увеличении площади взаимодействия до размеров пальца, увеличивается А, максимизируется изменение емкости. При увеличении слоя изоляции d, изменение емкости уменьшается обратнопропорционально. Ключевой момент, который нельзя игнорировать, это материал из которого выполняется изоляция. Диэлектрическая постоянная изоляционного материала, а так же его толщина очень сильно влияют на чувствительность и простоту использования емкостного датчика прикосновений. В таблице 1 представлены диэлектрические постоянные некоторых материалов.
Таблица 1. Диэлектрические постоянные материалов
Кроме самого изолятора, важным моментом является соединение датчика и изолятора. Если соединение не плотное и имеются промежутки, емкость датчика изменится. Поэтому часто используются клейкие изоляторы.
Использование MSP430 для измерения емкости датчика прикосновений
Теперь рассмотрим два метода измерения емкости датчика прикосновений.
Метод измерения на основе осциллятора
Первый метод основан на использовании осциллятора. Реализовать этот метод можно на базе MSP430, с использованием его компаратора и емкостного датчика в качестве элемента настройки. Любые изменения емкости датчика приведут к изменению частоты, которая может быть измерена с помощью таймера Timer_A микроконтроллера MSP430. На рисунке 5 показан пример такой системы.

Рис. 5.
Резисторы R создают опору для компаратора, когда на Px.y установлен высокий уровень. Этот сигнал противоположен по полярности сигналу зарядки или разрядки емкости датчика (C sensor), что приводит к длительным осцилляциям. При равных значениях сопротивления R граничные значения составляют 1/3 V cc и 2/3 V cc , частота осцилляций вычисляется по формуле:
f OSC = 1/
Подсчитав число периодов осцилляций в течение заданного промежутка времени, можно вычислить частоту и измерить емкость. В рассматриваемом приложении сопротивление резистора R C составляет 100 кОм. В результате частота осцилляций равна приблизительно 600 кГц при емкости датчика 10 пФ.
В качестве источника тактового сигнала используется интегрированный 12 килогерцовый VLO. Этот сигнал подается на сторожевой таймер WDT. С каждым прерыванием сторожевого таймера ядро анализирует состояние регистра таймера Timer_A, TAR. Вычисляется разница двух последних значений регистра. В реальности абсолютное значение емкости не нужно, интересно только ее изменение.
Возможно построение системы с несколькими емкостными датчиками. Для этого требуется построение мультиплексора на компараторе Comparator_A+ (рисунок 6).
Рис. 6.
Для реализации системы требуется по одному резистору на каждый датчик и три резистора для компаратора.
Метод измерения емкости на основе резистора
Второй метод измерения емкости датчика прикосновений основан на использовании внешнего резистора для зарядки или разрядки емкостного датчика. Для зарядки или разрядки используется один из портов MSP430, время заряда или разряда измеряется с помощью встроенного таймера Timer_A. На рисунке 7 изображен пример системы с использованием микроконтроллера MSP430 для измерения времени разряда конденсатора.
Рис. 7.
При значении емкости C sensor = 10 пФ и R = 5,1 М время разрядки составляет около 250 мкс. Px.y конфигурируется как выход с высоким уровнем для зарядки конденсатора. Он может быть переконфигурирован как вход, для разряда C sensor через R. Максимальный ток через порт MSP430 составляет ±50 нА.
Если порт Px.y поддерживает работу с прерываниями (у MSP430 это порты P1.x и P2.x), внутренний сигнал низкого уровня может использоваться как порог, при достижении которого они генерируются. При получении этого прерывания, ядро анализирует содержимое регистра таймера Timer_A. Таймер может использовать в качестве источника тактового сигнала внутренний DCO. Частота генерируемого сигнала при этом составляет 8 или 16 МГц (в зависимости от семейства MSP430).

Рис. 8.
На рисунке 8 показан один измерительный цикл. Таймер начинает отсчет с нуля и в момент, когда напряжение на датчике достигает порога V IT , значение таймера считывается. Также таймер может работать в режиме постоянного счета, при этом нужно производить считывание его значений в момент начала и конца разряда конденсатора и вычислять их разницу. При увеличении емкости датчика возрастает время разряда конденсатора и увеличивается число циклов таймера за время измерения.
Выше говорилось, что для каждого порта нужен один резистор. Схему можно упростить, если использовать один резистор для двух портов. Во время измерения емкости одного из датчиков порт, подключенный ко второму должен иметь низкий уровень сигнала, т.е. служит заземлением для разрядки емкости. Другое достоинство такой схемы в том, что емкость каждого датчика может быть измерена в двух направлениях: зарядка от нуля до высокого уровня и разрядка от V cc до порога низкого уровня. На рисунке 9 показан этот метод.
Рис. 9.
Подсчет тактов нужно производить два раза: во время заряда и разряда. При этом шум 50/60 МГц оказывает меньше влияния на результат измерения.
Программное обеспечение
После того как результат измерения получен, его нужно программно интерпретировать. Шум источника питания, сдвиг частоты синхронизации, внешние 50/60 МГц шумы могут привести к неправильному принятию решения.
Иногда для эффективности можно отбросить несколько младших битов результата. Это приемлемо, если нужно отслеживать только факт нажатия кнопки. Но если требуется более высокое разрешение, этого себе позволить уже нельзя. Низкочастотная фильтрация и простое усреднение нескольких полученных результатов может помочь сгладить шумы. Но для достижения низкого энергопотребления наличие младших битов результата измерения более критично.
Отслеживание базовой емкости датчика
Без возможности динамически отслеживать изменения емкости датчика, всякого рода нестабильности могут привести к ложному обнаружению нажатия кнопки или ее «залипания». Рассмотрим вариант с простой кнопкой, которая имеет два состояния: включена/выключена. В случае если результат смещается, он может приблизиться к порогу, при достижении которого кнопка считается нажатой, то есть произойдет ложное срабатывание.
Один из методов отслеживания и подстройки базовой емкости показан на рисунке 10.
Нужно обратить внимание на то, что эти действия выполняются для каждого датчика отдельно. Вычисление переменной «Delta» и подстройка «base» производится по-разному в RO- и RC-алгоритмах. В RO измеренное значение уменьшается, когда емкость конденсатора увеличивается; а в RC измеренное значение увеличивается.
После завершения измерения, в первую очередь, нужно определить, произошло ли прикосновение. Это может быть произведено путем сравнения полученного значения с порогом, соответствующим самому легкому прикосновению, которое может быть распознано. Если определено, что прикосновения не было, базовое значение подстраивается. Каким образом происходит подстройка, зависит от того, в какую сторону произошло изменение.
При увеличении результата измерения емкости рекомендуется подстраивать базовое значение более медленно. Увеличение результата может означать не только сдвиг в результате ошибок, но и в результате движения пальца в направлении датчика. И если базовое значение подстраивается быстро, реальное прикосновение пальца может быть не замечено. Для этого рекомендуется подстраивать базовое значение только на единицу каждый цикл измерения (рисунок 10).

Рис. 10.
Реализация функции обычной кнопки
Построение кнопок является самым распространенным вариантом использования емкостных датчиков. На рисунке 11 дан пример построения системы с четырьмя кнопками.

Рис. 11.
Порог, при котором принимается решение, что кнопка нажата, должен быть выше шумов.
Реализация функции слайдера
Более сложная функция, организуемая на емкостных датчиках, слайдер. При этом нужно отслеживать превышение уже нескольких порогов.
Самый простой вариант построения слайдера можно организовать, если для каждого датчика определить несколько позиций. В примере, приведенном ниже (рисунок 12), рассматривается система, в которой для каждого датчика определено 16 позиций. В результате получается 64-позиционная система.
Рис. 12.
В качестве DELTAMAX выбирается максимальное значение емкости, которое может быть достигнуто. Затем производится деление диапазона от 0 до DELTAMAX на определенное число шагов Steps. Ноль соответствует случаю, когда кнопка не нажата. По максимальному значению определяется положение пальца. Более линейная передаточная характеристика системы достигается с помощью интерполяции значений всех датчиков.
Мультиплексирование датчиков для построения слайдера
При построении слайдера расширить число датчиков при ограниченном числе портов ввода/вывода можно посредствам мультиплексирования. При этом к одному выводу подключается несколько датчиков. Дополнительный датчик приводит только к увеличению базовой емкости. Однако, при увеличении базовой емкости, в момент воздействия только на один из датчиков, отклик датчика меньше. Поэтому, обычно вместе не соединяют более двух датчиков.
Для того, чтобы определить, какой из мультиплексированных датчиков подвергается воздействию, их нужно разнести в пространстве. Пример расположения датчиков в такой системе показан на рисунке 13.

Рис. 13.
Заключение
В статье рассмотрены два метода реализации емкостных датчиков прикосновения с использованием MSP430. Каждый из методов имеет свои достоинства и недостатки. Рассмотрим основные из них.
- Метод на основе осциллятора:
— Требуется микроконтроллер с компаратором Comp_A+;
— Число независимых датчиков ограничено количеством входов Comp_A+;
— Требуется один внешний резистор R на каждый датчик, а также цепь из трех R;
— Чувствительность ограничена потреблением мощности (программируемое время измерения);
- Метод на основе резистора:
— Может быть реализован на любом микроконтроллере MSP430;
— До 16 независимых датчиков (16 портов ввода/вывода, работающих с прерываниями);
— Один внешний резистор R на каждые два датчика;
— Чувствительность ограничена максимальной частотой микроконтроллера (фиксированное время измерения);
— Минимальное потребление энергии;
Приложение может быть расширено и оптимизировано пользователем для реализации конечного устройства.
Полное описание различных примеров применений MSP430, исходные тексты программ, дополнительную информацию можно найти на сайте www.сайт
в разделе, посвященном микроконтроллерам.
Получение технической информации, заказ образцов, поставка —
e-mail:
Новое семейство тактовых генераторов
Компания Texas Instruments представила семейство программируемых тактовых генераторов,
имеющих от 1 до 4 схем ФАПЧ. ИС позволяют генерировать до 9 тактовых сигналов, синтезируемых из одной входной частоты. Каждый выход поддерживает внутрисистемное программирование частоты до 230 МГц. Перечисленные особенности предоставляют ряд преимуществ. В их числе — пониженное потребление, более быстрый процесс проектирования и простота изменения тактовых частот без необходимости повторного проектирования системы. Эти преимущества позволят существенно снизить стоимость потребительских приложений, в т.ч. IP ТВ-приставок, IP-телефонов, цифровых медиасистем (цифровые телевизоры, устройства с потоковыми медиаданными, принтеры, навигационные системы и портативные устройства).
Новые тактовые генераторы оптимизированы на работу совместно с процессорами DaVinci TM (TI) для генерации тактовых сигналов цифровых процессоров, аудио АЦП или кодеков, а также контроллеров Ethernet или USB. Встроенный кварцевый генератор, управляемый напряжением (VCXO) позволяет выполнить частотную синхронизацию различных потоков данных.
| Состав нового семейства тактовых генераторов | ||
|---|---|---|
| Наименование | ФАПЧ | Выход, В |
| CDCE949 | 4 | 2,5/3,3 |
| CDCE937 | 3 | 2,5/3,3 |
| CDCE925 | 2 | 2,5/3,3 |
| CDCE913 | 1 | 2,5/3,3 |
| CDCEL949 | 4 | 1,8 |
| CDCEL937 | 3 | 1,8 |
| CDCEL925 | 2 | 1,8 |
| CDCEL913 | 1 | 1,8 |
О компании Texas Instruments
Емкостной датчик – это один из типов бесконтактных датчиков, принцип работы которого основан на изменении диэлектрической проницаемости среды между двух обкладок конденсатора. Одной обкладкой служит сенсорный датчик схемы в виде металлической пластины или провода, а второй – электропроводящее вещество, например, металл, вода или тело человека.
При разработке системы автоматического включения подачи воды в унитаз для биде возникла необходимость применения емкостного датчика присутствия и выключателя, обладающих высокой надежностью, устойчивостью к изменению внешней температуры, влажности, пыли и питающему напряжению. Хотелось также исключить необходимость прикосновения человека с органами управления системы. Предъявляемые требования могли обеспечить только схемы сенсорных датчиков, работающих на принципе изменения емкости. Готовой схемы удовлетворяющей необходимым требованиям не нашел, пришлось разработать самостоятельно.
Получился универсальный емкостной сенсорный датчик, который не требует настройки и реагирует на приближающиеся электропроводящие предметы, в том числе и человека, на расстояние до 5 см. Область применения предлагаемого сенсорного датчика не ограничена. Его можно применять, например, для включения освещения, систем охранной сигнализации, определения уровня воды и в многих других случаях.
Электрические принципиальные схемы
Для управления подачей воды в биде унитаза понадобилось два емкостных сенсорных датчика. Один датчик нужно было установить непосредственно на унитазе, он должен был выдавать сигнал логического нуля при присутствии человека, а при отсутствии сигнал логической единицы. Второй емкостной датчик должен был служить включателем воды и находиться в одном из двух логических состояний.
При поднесении к сенсору руки датчик должен был менять логическое состояние на выходе – из исходного единичного состояния переходить в состояние логического нуля, при повторном прикосновении руки из нулевого состояния переходить в состояние логической единицы. И так до бесконечности, пока на сенсорный включатель поступает разрешающий сигнал логического нуля с сенсорного датчика присутствия.
Схема емкостного сенсорного датчика
Основой схемы емкостного сенсорного датчика присутствия является задающий генератор прямоугольных импульсов, выполненный по классической схеме на двух логических элементах микросхемы D1.1 и D1.2. Частота генератора определяется номиналами элементов R1 и C1 и выбрана около 50 кГц. Значение частоты на работу емкостного датчика практически не влияет. Я менял частоту от 20 до 200 кГц и влияния на работу устройства визуально не заметил.
С 4 вывода микросхемы D1.2 сигнал прямоугольной формы через резистор R2 поступает на входы 8, 9 микросхемы D1.3 и через переменный резистор R3 на входы 12,13 D1.4. На вход микросхемы D1.3 сигнал поступает с небольшим изменением наклона фронта импульсов из-за установленного датчика, представляющего собой кусок провода или металлическую пластину. На входе D1.4, из за конденсатора С2, фронт изменяется на время, необходимое для его перезаряда. Благодаря наличию подстроечного резистора R3, есть возможность фронты импульса на входе D1.4, выставить равным фронту импульса на входе D1.3.
Если приблизить к антенне (сенсорному датчику) руку или металлический предмет, то емкость на входе микросхемы DD1.3 увеличится и фронт поступающего импульса задержатся во времени, относительно фронта импульса, поступающего на вход DD1.4. чтобы «уловить» эту задержку про инвертированные импульсы подаются на микросхему DD2.1, представляющую собой D триггер, работающий следующим образом. По положительному фронту импульса, поступающего на вход микросхемы C, на выход триггера передается сигнал, который в тот момент был на входе D. Следовательно, если сигнал на входе D не изменяется, поступающие импульсы на счетный вход C не оказывают влияния на уровень выходного сигнала. Это свойство D триггера и позволило сделать простой емкостной сенсорный датчик.
Когда емкость антенны, из за приближения к ней тела человека, на входе DD1.3 увеличивается, импульс задерживается и это фиксирует D триггер, изменяя свое выходное состояние. Светодиод HL1 служит для индикации наличия питающего напряжения, а HL2 для индикации приближения к сенсорному датчику.
Схема сенсорного включателя
Схему емкостного сенсорного датчика можно использовать и для работы сенсорного включателя, но с небольшой доработкой, так как ему необходимо не только реагировать на приближение тела человека, но и оставаться в установившемся состоянии после удаления руки. Для решения этой задачи пришлось к выходу сенсорного датчика добавить еще один D триггер, DD2.2, включенный по схеме делителя на два.
Схема емкостного датчика была немного доработана. Для исключения ложных срабатываний, так как человек может подносить и удалять руку медленно, из-за наличия помех датчик может выдавать на счетный вход D триггера несколько импульсов, нарушая необходимый алгоритм работы включателя. Поэтому была добавлена RC цепочка из элементов R4 и C5, которая на небольшое время блокировала возможность переключение D триггера.
Триггер DD2.2 работает так же, как и DD2.1, но сигнал на вход D подается не с других элементов, а с инверсного выхода DD2.2. В результате по положительному фронту импульса, приходящего на вход С сигнал на входе D изменяется на противоположный. Например, если в исходном состоянии на выводе 13 был логический ноль, то поднеся руку к сенсору один раз, триггер переключится и на выводе 13 установится логическая единица. При следующем воздействии на сенсор, на выводе 13 опять установится логический ноль.
Для блокировки включателя при отсутствии человека на унитазе, с сенсора на вход R (установка нуля на выходе триггера вне зависимости от сигналов на всех остальных его входах) микросхемы DD2.2 подается логическая единица. На выходе емкостного выключателя устанавливается логический ноль, который по жгуту подается на базу ключевого транзистора включения электромагнитного клапана в Блоке питания и коммутации.
Резистор R6, при отсутствии блокирующего сигнала с емкостного датчика в случае его отказа или обрыва управляющего провода, блокирует триггер по входу R, тем самым исключает возможность самопроизвольной подачи воды в биде. Конденсатор С6 защищает вход R от помех. Светодиод HL3 служит для индикации подачи воды в биде.
Конструкция и детали емкостных сенсорных датчиков
Когда я начал разрабатывать сенсорную систему подачи воды в биде, то наиболее трудной задачей мне казалась разработка емкостного датчика присутствия. Обусловлено это было рядом ограничений по установке и эксплуатации. Не хотелось, чтобы датчик был механически связан с крышкой унитаза, так как ее периодически надо снимать для мойки, и не мешал при санитарной обработке самого унитаза. Поэтому и выбрал в качестве реагирующего элемента емкость.
Сенсорного датчика присутствия
По выше опубликованной схеме сделал опытный образец. Детали емкостного датчика собраны на печатной плате, плата размещена в пластмассовой коробке и закрывается крышкой. Для подключения антенны в корпусе установлен одноштырьковый разъем, для подачи питающего напряжения и сигнала установлен четырех контактный разъем РШ2Н. Соединена печатная плата с разъемами пайкой медными проводниками в фторопластовой изоляции.
Сенсорный емкостной датчик собран на двух микросхемах КР561 серии, ЛЕ5 и ТМ2. Вместо микросхемы КР561ЛЕ5 можно применить КР561ЛА7. Подойдут и микросхемы 176 серии, импортные аналоги. Резисторы, конденсаторы и светодиоды подойдут любого типа. Конденсатор С2, для стабильной работы емкостного датчика при эксплуатации в условиях больших колебаниях температуры окружающей среды нужно брать с малым ТКЕ.
Установлен датчик под площадкой унитаза, на которой установлен сливной бачек в месте, куда в случае протечки из бачка вода попасть не сможет. К унитазу корпус датчика приклеен с помощью двустороннего скотча.

Антенный датчик емкостного сенсора представляет собой отрезок медного многожильного провода длинной 35 см в изоляции из фторопласта, приклеенного с помощью прозрачного скотча к внешней стенке чаши унитаза на сантиметр ниже плоскости очка. На фотографии сенсор хорошо виден.
Для настойки чувствительности сенсорного датчика необходимо после его установки на унитаз, изменяя сопротивление подстроечного резистора R3 добиться, чтобы светодиод HL2 погас. Далее положить руку на крышку унитаза над местом нахождения сенсора, светодиод HL2 должен загораться, если руку убрать, потухнуть. Так как бедро человека по массе больше руки, то при эксплуатации сенсорный датчик, после такой настройки, будет работать гарантировано.
Конструкция и детали емкостного сенсорного включателя
Схема емкостного сенсорного включателя имеет больше деталей и для их размещения понадобился корпус большего размера, да и по эстетическим соображениям, внешний вид корпуса, в котором был размещен сенсорный датчик присутствия не очень подходил для установки на видном месте. Внимание на себя обратила настенная розетка rj-11 для подключения телефона. По размерам она подходила и имела хороший внешний вид. Удалив из розетки все лишнее, разместил в ней печатную плату емкостного сенсорного выключателя.
Для закрепления печатной платы в основании корпуса была установлена короткая стойка и к ней с помощью винта прикручена печатная плата с деталями сенсорного выключателя.

Датчик емкостного сенсора сделал, приклеив ко дну крышки розетки клеем «Момент» лист латуни, предварительно вырезав в них окошко для светодиодов. При закрывании крышки, пружина (взята от кремневой зажигалки) соприкасается с латунным листом и таким образом обеспечивается электрический контакт между схемой и сенсором.
Крепится емкостной сенсорный включатель на стену с помощью одного самореза. Для этого в корпусе предусмотрено отверстие. Далее устанавливается плата, разъем и закрепляется защелками крышка.

Настройка емкостного выключателя практически не отличается от настройки сенсорного датчика присутствия, описанного выше. Для настойки нужно подать питающее напряжение и резистором отрегулировать, чтобы светодиод HL2 загорался, когда к датчику подносится рука, и гас, при ее удалении. Далее нужно активировать сенсорный датчик и поднести и удалить руку к сенсору выключателя. Должен мигнуть светодиод HL2 и загореться красный светодиод HL3. При удалении руки красный светодиод должен продолжать светиться. При повторном поднесении руки или удалении тела от датчика, светодиод HL3 должен погаснуть, то есть выключить подачу воды в биде.
Универсальная печатная плата
Представленные выше емкостные датчики собраны на печатных платах, несколько отличающихся от печатной платы приведенной ниже на фотографии. Это связано с объединением обеих печатных плат в одну универсальную. Если собирать сенсорный включатель, то необходимо только перерезать дорожку под номером 2. Если собирать сенсорный датчик присутствия, то удаляется дорожка номер 1 и не все элементы устанавливаются.

Не устанавливаются элементы, необходимые для работы сенсорного включателя, но мешающие работе датчика присутствия, R4, С5, R6, С6, HL2 и R4. Вместо R4 и С6 запаиваются проволочные перемычки. Цепочку R4, С5 можно оставить. Она не будет влиять на работу.
Ниже приведен рисунок печатной платы для накатки при использовании термического метода нанесения на фольгу дорожек.
Достаточно распечатать рисунок на глянцевой бумаге или кальке и шаблон готов для изготовления печатной платы.
Безотказная работа емкостных датчиков для сенсорной системы управления подачи воды в биде подтверждена на практике в течении трех лет постоянной эксплуатации. Сбоев в работе не зафиксировано.
Однако хочу заметить, что схема чувствительна к мощным импульсным помехам. Мне приходило письмо о помощи в настройке. Оказалось, что во время отладки схемы рядом находился паяльник с тиристорным регулятором температуры. После выключения паяльника схема заработала.
Еще был такой случай. Емкостной датчик был установлен в светильник, который подключался в одну розетку с холодильником. При его включении свет включался и при повторном выключался. Вопрос был решен подключением светильника в другую розетку.
Приходило письмо об успешном применении описанной схемы емкостного датчика для регулировки уровня воды в накопительном баке из пластика. В нижней и верхней части было приклеено силиконом по датчику, которые управляли включением и выключением электрического насоса.
Ультразвуковой датчик
Ультразвуковой сенсор — один из двух сенсоров, заменяющих роботу зрение. Ультразвуковой сенсор позволяет роботу видеть и обнаруживать объекты. Его также можно использовать для того, чтобы робот мог обойти препятствия, оценить и измерить расстояние, а также зафиксировать движение объекта.
Показания ультразвукового датчика измеряется в сантиметрах и дюймах. Он может измерять расстояние от 0 до 255 сантиметров с точностью +/-3 см. Ультразвуковой сенсор работает по тому же принципу, что и локатор летучей мыши: он измеряет расстояние путем расчета времени, которое потребовалось звуковой волне для возвращения после отражения от объекта, подобно эху.
Крупные объекты с твердыми поверхностями определяются лучше всего. Объекты из мягких материалов (тканей) или округлые (мяч), а также слишком тонкие, маленькие и т.п., могут создавать для сенсора определенные затруднения при работе.
Следует помнить, что два и более ультразвуковых датчика, работающих в одном помещении, могут интерферировать и снижать точность результатов
К примерам применения ультразвуковых датчиков расстояния можно отнести использования в машинах для предупреждающих сигналов водителю или автоматический контроль по сигналам от датчиков, идентифицирующих опасные ситуации, объединяемых в сетевые связи, с человеко-машинным интерфейсом human — machine interface (HMI).
Рис.1
В основе ультразвукового принципа обнаружения препятствий лежит принцип эха. В состав датчика входят два преобразователя: один преобразователь излучает ультразвуковые волны, а отраженные волны обнаруживаются другим, одним или более, преобразователем. Тот же самый преобразователь, который передает ультразвуковые волны, может быть использован и для обнаружения отраженной волны. Основное назначение датчиков — обнаруживать присутствие или отсутствие препятствия, но данный принцип (time of flight) позволяет также по времени возвращения эха при известной скорости распространения звука рассчитывать расстояние до объекта.
Ультразвук представляет собой не что иное, как вибрацию на частоте > 20 кГц. Большинство коммерчески доступных преобразователей работает на частотах в диапазоне 40-250 кГц.
Вариации акустических параметров датчиков, окружающая среда и различные цели значительно влияют на работу устройств .
В ультразвуковом датчике преобразователь генерирует короткий импульс, направляемый на цель и возвращающийся обратно
Важно, что скорость звука является функцией состава и температуры среды (воздуха) и влияет на точность и разрешение датчика. Точность измерений расстояния прямо пропорциональна точности значения скорости звука, используемого в вычислениях, и варьируется в реальных условиях от 345 м/c при комнатной температуре до более чем 380 м/c при температуре порядка 70 °C. Длина звуковой волны
является функцией скорости ультразвука c и взаимосвязана с его частотой ѓ, поэтому эти параметры (длина волны и частота) также влияют на разрешение и точность, а также минимальный размер целей и диапазон расстояний, измеряемых датчиком.
Затухание звука является функцией частоты и влажности, что влияет на максимальное расстояние, детектируемое датчиком. Длинные волны (с меньшей частотой) характеризуются меньшим затуханием. На частотах свыше 125 кГц максимальное затухание случается при относительной влажности 100%, на частотах 40 кГц — уже при влажности в 50%. Так как датчик должен работать при любых значениях влажности, в расчетах используется максимальное затухание для каждой частоты.
Фоновые шумы являются функцией частоты и уменьшаются с ее увеличением, также оказывая влияние на максимально детектируемое расстояние и минимальный размер цели. Разрешение и точность на высоких частотах выше, тогда как диапазон выше с более длинными волнами.
Датчик касания
Датчик касания это кнопка, у которой возможно два состояния — нажато и отжато. Программно датчик распознает еще одно состояние Касание.
Увидеть на экране дисплея реакцию датчика касания можно в режиме Просмотра. При не нажатой кнопке датчика на дисплее появляется 0, а при нажатой — 1.
Добавив в конструкцию робота датчик касания (например в виде бампера) вы можете сделать так, чтобы робот изменил поведение при активации датчика.
Датчик касания является одним из органов осязания для роботов, что делает его необходимым там где требуется реакция робота на объекты.
Датчик касания позволяет роботу осуществлять прикосновения.
Сенсор нажатия может определить момент нажатия на него чего-либо, а так же момент освобождения.
Датчик касания представлен на рис.2.
Рис.2 Датчик касания
Микрометр
Для замера холостого хода у датчика касания необходим микрометр (или Индикатор часового типа) ИЧ-25 который будет измерять расстояние прошедшее датчиком до момента срабатывания.
ИЧ-25 предназначен для измерения линейных размеров абсолютным и относительным методами, определения величины отклонений от заданной геометрической формы и взаимного расположения поверхностей.
На рис.3 представлены несколько видов индикаторов.

Рис.3.
Параметры микрометра ИЧ 25:
Диапазон измерений 0-25 мм.
Цена деления 0.01 мм.
Габариты 159х85х51 мм.
В данной статье мы подробно (но не слишком) рассмотрим принципы электричества, которые позволяют нам обнаруживать прикосновение человеческого пальца, используя немного больше, чем просто конденсатор.
Конденсаторы могут быть сенсорными
В течение последнего десятилетия или около того стало действительно трудно представить себе мир с электроникой без сенсорных датчиков прикосновений. Смартфоны являются тому наиболее заметным и распространенным примером, но, конечно, существуют и другие многочисленные устройства и системы, которые обладают датчиками прикосновений. Для построения сенсорных датчиков прикосновений могут использоваться и емкость, и сопротивление; в данной статье мы будем обсуждать только емкостные датчики, которые более предпочтительны в реализации.
Хотя применения, основанные на емкостных датчиках, могут быть довольно сложными, фундаментальные принципы, лежащие в основе данной технологии, достаточно просты. На самом деле, если вы понимаете суть емкости и факторы, которые определяют емкость конкретного конденсатора, вы стоите на правильном пути в понимании работы емкостных сенсорных датчиков прикосновения.
Емкостные сенсорные датчики касания делятся на две основные категории: на основе взаимной емкости и на основе собственной емкости. Первый из них, в котором конденсатор датчика состоит из двух выводов, которые действуют как излучающий и приемный электроды, является более предпочтительным для сенсорных дисплеев. Последний, в котором один вывод конденсатора датчика подключен к земле, является прямым подходом, который подходит для сенсорной кнопки, слайдера или колеса. В данной статье мы рассмотрим датчики на основе собственной емкости.
Конденсатор на базе печатной платы
Конденсаторы могут быть различных типов. Мы все привыкли видеть емкость в виде компонентов с выводами или корпусов поверхностного монтажа, но на самом деле, всё, что вам действительно необходимо, это два проводника, разделенных изолирующим материалом (т.е. диэлектриком). Таким образом, довольно просто создать конденсатор, используя лишь электропроводные слои, разделенные печатной платой. Например, рассмотрим следующие вид сверху и вид сбоку печатного конденсатора, используемого в качестве сенсорной кнопки прикосновения (обратите внимание на переход на другой слой печатной платы на рисунке вида сбоку).
Изолирующее разделение между сенсорной кнопкой и окружающей медью создает конденсатор. В этом случае, окружающая медь подключена к земле, и, следовательно, наша сенсорная кнопка может быть смоделирована, как конденсатор между сенсорной сигнальной площадкой и землей.
Возможно, сейчас вы захотите узнать, какую емкость реально обеспечивает такая разводка печатной платы. Кроме того, как мы рассчитаем ее точно? Ответ на первый вопрос: емкость очень мала, может составлять около 10 пФ. Что касается второго вопроса: не беспокойтесь, если забыли электростатику, потому что точное значение емкости конденсатора не имеет никакого значения
. Мы ищем только изменения в емкости, и мы можем обнаружить эти изменения без знания номинального значения емкости печатного конденсатора.
Влияние пальца
Так что же вызывает эти изменения емкости, которые контроллер датчика прикосновений собирается обнаружить? Ну, конечно же, человеческий палец.
Прежде, чем мы обсудим, почему палец изменяет емкость, важно понимать, что здесь нет прямого электрического контакта; палец изолирован от конденсатора лаком на печатной плате и, как правило, слоем пластика, который отделяет электронику устройства от внешней среды. Так что палец не разряжает конденсатор
, и, кроме того, количество заряда, хранимое в конденсаторе в определенный момент, не представляет интереса — скорее интерес представляет емкость в определенный момент.
Итак, почему же присутствие пальца изменяет емкость? Есть две причины: первая включает в себя диэлектрические свойства пальца, а вторая включает в себя его проводящие свойства.
Палец как диэлектрик
Обычно мы думаем о конденсаторе, как имеющем фиксированную величину, определяемую площадью двух проводящих пластин, расстоянием между ними и диэлектрической проницаемостью материала между пластинами. Мы, конечно, не можем изменить физические размеры конденсатора, просто прикоснувшись к нему, но мы можем
изменить диэлектрическую проницаемость, так как палец человека обладает диэлектрическими характеристиками, отличающимися от материала (предположительно воздуха), который он вытесняет. Это правда, что палец не будет находиться в настоящей области диэлектрика, т.е. в изолирующем пространстве непосредственно между проводниками, но такое «вторжение» в конденсатор необязательно:
Как показано на рисунке, чтобы изменить диэлектрические характеристики, нет необходимости помещать палец между пластинами, поскольку электрическое поле конденсатора распространяется в окружающую среду.
Оказывается, что человеческая плоть является довольно хорошим диэлектриком, потому что наши тела состоят в основном из воды. Относительная диэлектрическая проницаемость вакуума равна 1, а относительная диэлектрическая проницаемость воздуха лишь немного выше (около 1,0006 на уровне моря при комнатной температуре). Относительная диэлектрическая проницаемость воды намного выше, около 80. Таким образом, взаимодействие пальца с электрическим полем конденсатора представляет собой увеличение относительной диэлектрической проницаемости, и, следовательно, приводит к увеличению емкости.
Палец как проводник
Любой, кто испытал на себе удар электрического тока, знает, что кожа человека проводит ток. Я уже упоминал выше, что прямого контакта между пальцем и сенсорной кнопкой (то есть ситуации, когда палец разряжает печатный конденсатор) нет. Тем не менее, это не означает, что проводимость пальца не имеет значения. Она на самом деле весьма важна, так как палец становится второй проводящей пластиной в дополнительном конденсаторе:
На практике мы можем предположить, что этот новый конденсатор, созданный пальцем, подключен параллельно существующему печатному конденсатору. Эта ситуация немного сложнее, потому что человек, использующий сенсорное устройство, электрически не соединен с землей на печатной плате, и, таким образом, эти два конденсатора не включены параллельно в обычном для анализа цепей смысле.
Тем не менее, мы можем думать о человеческом теле, как об обеспечивающем виртуальную
землю, поскольку оно имеет относительно большую емкость, чтобы поглощать электрический заряд. В любом случае, нам не нужно беспокоиться о точной электрической связи между конденсатором с пальцем и печатным конденсатором; важным моментом является то, что псевдопараллельное соединение этих двух конденсаторов означает, что палец будет увеличивать общую емкость, так как конденсатор добавляется параллельно.
Таким образом, мы можем увидеть, что оба механизма влияния при взаимодействии пальца и емкостного датчика касания способствуют увеличению емкости.
Близкое расстояние или контакт
Предыдущее обсуждение приводит нас к интересной особенности емкостных датчиков касаний: измеряемое изменение емкости может быть вызвано не только контактом
между пальцем и датчиком, но и близким расстоянием
между ними. Я обычно думаю о сенсорном устройстве, как о замене механического переключателя или кнопки, но емкостная технология датчиков касаний на самом деле представляет собой новый уровень функциональности, позволяя системе определять расстояние между датчиком и пальцем.
Оба механизма изменения емкости, описанные выше, оказывают влияние, которое зависит от расстояния. Для механизма на базе диэлектрической проницаемости количество «мясного» диэлектрика взаимодействие с электрическим полем конденсатора увеличивается при приближении пальца к проводящим частям печатного конденсатора. Для механизма на базе проводящих свойств емкость конденсатора с пальцем (как и любого другого конденсатора) обратно пропорциональна расстоянию между проводящими пластинами.
Имейте в виду, что этот метода не подходит для измерения абсолютного
расстояния между датчиком и пальцем; емкостные датчики не предоставляют тех данных, которые необходимы для выполнения точных вычислений абсолютных расстояний. Я полагаю, что можно было бы откалибровать емкостную сенсорную систему для грубых измерений расстояний, но так как схема емкостных датчиков была разработана для обнаружения изменения
емкостей, то отсюда следует, что эта технология особенно подходит для обнаружения изменения
в расстояниях, т.е. когда палец приближается или удаляется от датчика.
Заключение
Теперь вы должны точно понимать фундаментальные основы, на базе которых строятся емкостные сенсорные системы. В следующей статье мы рассмотрим методы реализации этих основ, которые помогут вам перейти от теории к практике.
Надеюсь, статья оказалась полезной. Оставляйте комментарии!
Датчик системы распознавания прикосновения является составной частью ассистента движения в пробке. С помощью емкостного чувствительного элемента система определяет, находятся ли руки водителя на рулевом колесе.
Если руки водителя не обнаружены на ободе рулевого колеса, загорается соответствующий световой индикатор сигнала тревоги ассистента движения в пробке. Если затем в течение определенного промежутка времени руки водителя так и не обнаружены на рулевом колесе, дополнительно включается звуковой сигнал тревоги. Кроме того, деактивируется ассистент движения в пробке.
Описание функционирования
Датчик распознавания прикосновения состоит из мата с емкостным чувствительным элементом. Встроенный в обод рулевого колеса емкостной мат с электронным блоком обработки подключен к электронике распознавания прикосновения. Наличие рук на ободе рулевого колеса система распознает по изменению емкости. Электронная схема регистрирует это изменение и вычисляет соответствующий статус.
Электроника системы распознавания прикосновения циклически передает информацию о состоянии по шине LIN на соответствующий блок управления.
На следующем рисунке в качестве примера показаны датчик и электронный блок распознавания прикосновения.
| Обозначение | Пояснение | Обозначение | Пояснение |
|---|---|---|---|
| 1 | Датчик распознавания прикосновения состоит из мата с емкостным чувствительным элементом (схематическое изображение) | 2 | Электроника распознавания прикосновения |
| 3 | Место присоединения (мат с емкостным чувствительным элементом и электронный блок распознавания прикосновения) | 4 | 3-контактный штекерный разъем (подключение жгута проводов и шины LIN) |
| 5 | 2-контактный штекерный разъем (подключение датчика распознавания прикосновения) |
Структура и внутренние соединения
Датчик прикосновения подключается к электронике системы распознавания прикосновения через 2-контактный штекерный разъем.
Заданные значения
Соблюдать следующие заданные значения для датчика прикосновения:
Указания по диагностике
Проверка функционирования детали
При отказе датчика прикосновения возможно следующее:
- Запись кода ошибки в соответствующем блоке управления (зависит от серии)
- Коммутационный центр в рулевой колонке (SZL), например F01, F10
- Body Domain Controller (BDC), например F15, G11, G12
- Система помощи при движении в пробке автоматически отключается
Проверка работы датчика прикосновения выполняется диагностической системой.
Оставляем за собой право на опечатки, смысловые ошибки и технические изменения.
Только для ознакомительных целей. Информация на данном сейте предоставляется «как есть», без каких-либо гарантий точности, полноты и актуальности. Ни при каких обстоятельствах Администрация Сайта не будет нести ответственности ни перед какой стороной за какой-либо прямой, непрямой, особый или иной косвенный ущерб в результате любого использования информации на этом Сайте. Администрация оставляет за собой право вносить изменения без уведомления о них пользователей.
Здесь будут рассмотрены датчики звука и касания, чаще всего использующиеся в составе сигнализаций.
Модуль датчика касания KY-036
Модуль, по сути, представляет собой сенсорную кнопку. Как понимает автор, принцип действия устройства основан на том, что, прикасаясь к контакту датчика человек, становится антенной для приема наводок на частоте бытовой сети переменного тока . Эти сигналы поступают на компаратор LM393YD
Габариты модуля 42 х 15 х 13 мм, масса 2,8 г., в плате модуля имеется крепежное отверстие диаметром 3 мм. Индикация питания осуществляется светодиодом L1.

При срабатывании датчика загорается (мигает) светодиод L2. Потребляемый ток 3,9 мА в ждущем режиме и 4,9 мА при срабатывании.

Не совсем ясно, какой порог чувствительности датчика должен регулироваться переменным резистором. Данные модули с компаратором LM393YD являются стандартными и к ним припаивают различные датчики, получая, таким образом, модули различного назначения. Выводы питания «G» — общий провод, «+» – питание +5В. На цифровом входе «D0» присутствует низкий логический уровень, при срабатывании датчика на выходе появляется импульсы с частотой 50 Гц. На контакте «A0» присутствует инвертированный относительно «D0» сигнал . В целом модуль срабатывает дискретно, как кнопка, в чем можно убедиться с помощью программы LED_with_button .

Датчик касания позволяет использовать в качестве кнопки управления любую металлическую поверхность, отсутствие движущихся частей должно положительно сказаться на долговечности и надежности.
Модуль датчика звука KY-037
Модуль должен срабатывать от звуков, громкость которых превышает заданный предел. Чувствительным элементом модуля является микрофон, работающий вместе с компаратором на микросхеме LM393YD .


Габариты модуля 42 х 15 х 13 мм, масса 3,4 г., аналогично предыдущему случаю в плате модуля имеется крепежное отверстие диаметром 3 мм. Индикация питания осуществляется светодиодом L1. Выводы питания «G» — общий провод, «+»– питание +5В.

Потребляемый ток 4,1 мА в ждущем режиме и 5 мА при срабатывании.

На выводе «A0» напряжение изменяется в соответствии уровнем громкости сигналов, принимаемых микрофоном, с повышением громкости показания уменьшаются, в этом можно убедиться с помощью программы AnalogInput2.

На цифровом входе «D0» присутствует низкий логический уровень, при превышении заданного порога низкий уровень меняется на высокий. Порог срабатывания можно регулировать переменным резистором. При этом загорается светодиод L2. При резком громком звуке наблюдается задержка в 1-2 с при обратном переключении.

В целом полезный датчик для организации системы умного дома или сигнализации.
Модуль датчика звука KY-038
С первого взгляда модуль кажется аналогичным предыдущему. Чувствительным элементом модуля является микрофон, следует отметить, что по данному модулю в сети не так уж много информации .


Габариты модуля 40 х 15 х 13 мм, масса 2,8 г., аналогично предыдущему случаю в плате модуля имеется крепежное отверстие диаметром 3 мм. Индикация питания осуществляется светодиодом L1. Выводы питания «G» — общий провод, «+»– питание +5В.

При срабатывании геркона загорается светодиод L2. Потребляемый ток 4,2 мА в ждущем режиме и до 6 мА при срабатывании.

На выводе «A0» при повышении уровня громкости происходит увеличение показаний (использована программа AnalogInput2).

На контакте «D0» присутствует низкий логический уровень, при срабатывании датчика он меняется на высокий. Порог срабатывания настраивается подстроечным резистором (использована программа LED_with_button).

Этот датчик действительно практически не отличается от предыдущего, но взаимозаменяемость их возможна не всегда, т.к. при изменении уровня громкости характер изменения уровня напряжение на аналоговом выходе различается.
Выводы
На этом автор заканчивает обзор большого набора из различных датчиков для аппаратной платформы Arduino. В целом данный набор произвел на автора смешанное впечатление. В набор входят как достаточно сложные датчики, так и совсем простые конструкции. И если в случае наличия на плате модуля токоограничительных резисторов, светодиодных индикаторов и т.п. автор готов признать полезность подобных модулей, то небольшая часть модулей представляет собой одиночный радиоэлемент на плате. Зачем нужны такие модули, остается непонятным (видимо крепление на стандартных платах служит целям унификации). В целом набор является неплохим способом познакомиться с большинством широко распространенных датчиков, применяемых в Arduino проектах.
Полезные ссылки
- http://arduino-kit.ru/catalog/id/modul-datchika-kasaniya
- http://www.zi-zi.ru/module/module-ky036
- http://robocraft.ru/blog/arduino/57.html
- http://arduino-kit.ru/catalog/id/modul-datchika-zvuka
- http://www.zi-zi.ru/module/module-ky037
- http://arduino-kit.ru/catalog/id/modul-datchika-zvuka_
- http://smart-boards.ml/module-audiovideo-4.php
Для некоторых электротехнических устройств имеется необходимость в сенсорном включении, то есть начало или конец работы должно происходить при простом касании пальца руки к сенсорному контакту. Применить это можно в схемах электронных замков, сигнализаций, обычной техники, что упрощает её включение и выключение (всего лишь нужно прикоснуться).
В этой статье предлагаю достаточно простую электронную схему сенсорного включателя, которую может собрать практически любой человек. Состоит эта схема всего из нескольких электронных компонентов, главными из которых являются биполярные транзисторы, выполняющие роль усилителей сигнала. Ко входу (базе) первого транзистора подсоединяется сам провод сенсора (к которому нужно прикасаться). С выхода транзистора выходит усиленный в сотни раз сигнал, что подаётся на следующий элемент. Второй транзистор усиливает ещё больше уже до этого усиленный сигнал, ну и то же самое делает третий каскад схемы. В итоге мы из крайне малого сигнала, идущего от сенсора, получаем ток, что может зажечь светодиод (либо включить реле, что будет управлять тем или иным устройством).
Напомню, что биполярный транзистор представляет собой полупроводниковый элемент, имеющий три вывода (эмиттер, коллектор и база). Он способен усиливать электрический сигнал в 10-1000 раз. При подаче на управляющий вывод небольшого сигнала (где-то от 0,6 до 0,7 вольт) на выходе мы можем получить уже электрический ток и/или напряжение гораздо большей величины.
База является управляющим электродом, относительно эмиттера. То есть, от источника питания подается на базу (через ограничивающий резистор, создающий некое смещение) и коллектор определенная величина напряжения. При напряжении между базой и эмиттером до 0,6 вольт транзистор ещё будет закрыт (не будет пропускать через себя ток относительно эмиттера и коллектора). Повышая напряжение между базой и эмиттером уже от 0,6 и где-то до 0,7 вольт мы постепенно открывает транзистор от полностью закрытого состояния в полностью открытое. Следовательно, транзистор выполняет роль переменного резистора, который управляется небольшими токами и может изменять своё сопротивления от бесконечно большого до практически нулевого (всё же оно есть, хоть и весьма малое).
Резисторы в схеме простого сенсорного включателя, стоящие в цепи коллекторов, выполняют роль ограничителей тока. Их номиналы 1 мегаом, 1 килоом и 220 ом. Можно ставить маленькой мощности, небольшие по размеру (токи в схеме достаточно малые). В данной электрической схеме применены биполярные транзисторы типа КТ315 (подойдут с любым буквенным индексом). Эти транзисторы старотипные, найти их можно где угодно, и стоят они копейки (если их покупать). Заменить их можно на КТ3102 или любые другие, с похожими характеристиками. Эти транзисторы имеют проводимость n-p-n (новичкам стоит это учесть). Можно поставить в схему транзисторы и обратной проводимости (p-n-p) серии КТ361 или КТ3107, но тогда нужно будет поменять полярность на питании (на плюс подключать минус и наоборот).
Хочу заметить, что данная электрическая схема сенсора является не фиксированной, то есть выходное устройство будет срабатывать и работать только тогда, когда вы касаетесь входного сенсора. Как только вы перестанете касаться сенсора, то и выходное устройство также выключится.
Изначально в схему простого сенсорного включателя я поставил на выход обычный светодиод, который просто зажигался при касании сенсора. Если вместо светодиода поставить небольшое реле, то можно уже на выходе схемы иметь переключатель, что можно подключить к различным электрическим устройствам (звонку, лампочки, двигателю и т.д.). Параллельно катушки реле нужно будет припаять электролитический конденсатор небольшой ёмкости (где-то от 100 до 1000 микрофарад, и напряжением не менее чем у источника питания). А также подключить диод (обратное включение), что позволит исключить влияние на саму схему напряжения самоиндукции, возникающей на катушки реле. Диод подойдет любой!
P.S. Учтите, что светодиод имеет полярность! Если вы поставите его неправильно, то светиться он не будет. В случае использования реле учитывайте выходной ток транзистора. То есть, КТ315 может иметь на своём выходе силу тока не более 100 миллиампер. Следовательно, если поставить большую релюшку, у которой катушка потребляет большие токи, то транзистор может выйти из строя. Нужно ставить реле с соответствующим током на катушке или ставить более мощный биполярный транзистор на выходе схемы.
Датчик прикосновения TTP223B
(Сенсорная кнопка) используется для коммутации электрических цепей (включатель/выключатель), является отличной заменой традиционным механическим кнопкам (ключам). Отличается повышенной надежностью по причине отсутствия движущихся частей и низким энергопотреблением.
Для использования сенсорной кнопки TTP223B необходимо подключить питание и Arduino контроллер, либо другое микропроцессорное управляющее устройство. На плате находится светодиод, обозначенный «D», который загорается, когда на модуль подается питание. На плате модуля предусмотрено четыре отверстия для закрепления на плоской поверхности.
Сенсорная площадка работает по емкостной технологии. Срабатывание модуля на коммутацию происходит от прикосновения пальцем к сенсорному датчику. В состоянии покоя — на выходе модуля низкий уровень напряжения, при касании сенсора — появляется высокий уровень напряжения. После 12 секунд бездействия модуль переходит в режим пониженного энергопотребления.
Датчик прикосновения TTP223B имеет один 3-х контактный разъем.
Обозначение контактов
SIG
(выходной цифровой сигнал);
VCC
(напряжение питания);
GND
(общий контакт).
Питание модуля осуществляется либо от Arduino, а также другого микропроцессорного управляющего устройства, либо от внешнего источника питания (блока питания). Напряжение питания модуля 2 – 5,5 В.
Характеристики
модуль собран на микросхеме TTP223B;
сенсор работает по емкостной технологии;
светодиодная индикация питания;
напряжение питания модуля: 2 – 5,5 В;
чувствительность: 0 – 50 пФ;
время отклика (режим пониженного энергопотребления): 220 мс;
время отклика (активный режим): 60 мс;
размеры (Д х Ш х В): 24 х 24 7,5 мм;
вес: 3 г.




Ваш регион:
Самовывоз из офиса
Самовывоз из офиса в Москве
- При оформлении до 15:00 в будний день заказ можно забрать после 17:00 в тот же день, иначе — на следующий будний день после 17:00. Мы позвоним и подтвердим готовность заказа.
- Получить заказ можно с 10:00 до 21:00 без выходных после его готовности. Заказ будет ждать вас 3 рабочих дня. Если хотите продлить срок хранения, просто напишите или позвоните.
- Запишите номер своего заказа перед визитом. Он необходим при получении.
- Чтобы к нам пройти, предъявите на проходной паспорт, скажите, что вы в Амперку, и поднимитесь на лифте на 3-й этаж.
- бесплатно
Доставка курьером по Москве
Доставка курьером по Москве
- Доставляем на следующий день при заказе до 20:00, иначе — через день.
- Курьеры работают с понедельника по субботу, с 10:00 до 22:00.
- Оплатить заказ можно наличными при получении или же онлайн при оформлении заказа.
- 250 ₽
Доставка в пункт самовывоза
Доставка в пункт PickPoint
- PickPoint .
- Оплатить заказ можно наличными при получении или же онлайн при оформлении заказа.
- 240 ₽
Доставка курьером по Питеру
Доставка курьером по Санкт-Петербургу
- Доставляем через день при заказе до 20:00, иначе — через два дня.
- Курьеры работают с понедельника по субботу, с 11:00 до 22:00.
- При согласовании заказа можно выбрать трёхчасовой интервал доставки (самое раннее — с 12:00 до 15:00).
- Оплатить заказ можно наличными при получении или же онлайн при оформлении заказа.
- 350 ₽
Доставка в пункт самовывоза
Доставка в пункт PickPoint
- Доставка в пункт самовывоза — современный, удобный и быстрый способ получить свой заказ без звонков и ловли курьеров.
- Пункт самовывоза — это киоск с человеком или массив железных ящичков. Их ставят в супермаркетах, офисных центрах и других популярных местах. Ваш заказ окажется в том пункте, который выберите.
- Ближайший к себе пункт вы можете найти на карте PickPoint .
- Срок доставки — от 1 до 8 дней в зависимости от города. Например, в Москве это 1-2 дня; в Петербурге — 2—3 дня.
- Когда заказ прибудет в пункт выдачи, вы получите SMS с кодом для его получения.
- В любое удобное время в течение трёх дней вы можете прийти в пункт и с помощью кода из SMS получить заказ.
- Оплатить заказ можно наличными при получении или же онлайн при оформлении заказа.
- Стоимость доставки — от 240 руб в зависимости от города и габаритов заказа. Она рассчитывается автоматически во время оформления заказа.
- 240 ₽
Доставка в пункт самовывоза
Доставка в пункт PickPoint
- Доставка в пункт самовывоза — современный, удобный и быстрый способ получить свой заказ без звонков и ловли курьеров.
- Пункт самовывоза — это киоск с человеком или массив железных ящичков. Их ставят в супермаркетах, офисных центрах и других популярных местах. Ваш заказ окажется в том пункте, который выберите.
- Ближайший к себе пункт вы можете найти на карте PickPoint .
- Срок доставки — от 1 до 8 дней в зависимости от города. Например, в Москве это 1-2 дня; в Петербурге — 2—3 дня.
- Когда заказ прибудет в пункт выдачи, вы получите SMS с кодом для его получения.
- В любое удобное время в течение трёх дней вы можете прийти в пункт и с помощью кода из SMS получить заказ.
- Оплатить заказ можно наличными при получении или же онлайн при оформлении заказа.
- Стоимость доставки — от 240 руб в зависимости от города и габаритов заказа. Она рассчитывается автоматически во время оформления заказа.
Посылка Почтой России
Почта России
- Доставка осуществляется до ближайшего почтового отделения
в любом населённом пункте России
. - Тариф и сроки доставки диктует «Почта России». В среднем, время ожидания составляет 2 недели.
- Мы передаём заказ Почте России в течение двух рабочих дней.
- Оплатить заказ можно наличными при получении (наложенный платёж) или же онлайн при оформлении заказа.
- Стоимость рассчитывается автоматически во время заказа и в среднем должна составить около 400 рублей.
Доставка службой EMS
Доставка службой EMS
- Служба «EMS Почта России» работает быстрее и надёжнее обычной почты и доставляет до двери
покупателя. - Тариф и сроки доставки диктует служба EMS. В среднем по России время ожидания составляет 4-5 дней.
- Мы передаём заказ в EMS в течение двух рабочих дней.
- Оплатить заказ можно только онлайн при оформлении заказа.
- Стоимость рассчитывается автоматически во время оформления заказа и в среднем должна составить 400-800 рублей для России и 1500-2000 рублей для стран СНГ.
Помимо онлайн-магазина, товар также представлен:
Офис-магазин, м. Таганская
Офис-магазин, м. Таганская
Товары из офиса нельзя заказать через интернет или забронировать. Можно только прийти, схватить и бежать. Доступное количество актуально на момент загрузки страницы.
Офис находится в 5 минутах ходьбы от м. Таганская, по адресу Большой Дровяной переулок, дом 6 .
Скоро
Магазин-мастерская, м. Лиговский пр-т
Магазин-мастерская, м. Лиговский пр-т
Товары из магазина-мастерской нельзя заказать через интернет или забронировать. Можно только прийти, схватить и бежать. Доступное количество актуально на момент загрузки страницы.
Магазин-мастерская находится в трёх минутах пешком от метро Лиговский Проспект, на территории пространства «Лофт Проект Этажи», по адресу Лиговский проспект 74Д .
Ёмкостный датчик прикосновения работает как обычная кнопка, но в нём нет подвижных частей. Кнопка почувствует «нажатие» сквозь корпус устройства и сработает как бесконтактный концевик в проектах домашней автоматизации.
Сенсор работает через неметаллические материалы — пластмассу, картон, фанеру или стекло. Эту особенность можно использовать для создания скрытых или защищённых элементов управления.
Поместите модуль в герметичный корпус или спрячьте под лицевую панель устройства — кнопка почуствует приближение пальца даже через четырёхмиллиметровый слой диэлектрика.
Использование в качестве «кнопки» — не единственный вариант использования ёмкостных датчиков. Они отлично подойдут для контроля уровня воды в пластиковой бочке или стеклянном аквариуме.
Что на борту
Система определения прикосновения состоит из чувствительного элемента, блока измерения ёмкости датчика и логической схемы, реагирующей на изменение ёмкости при приближении объекта.
В качестве чувствительного элемента используется токопроводящий контур на лицевой части модуля.
Логика построена на базе микросхемы AT42QT1010 . Она отвечает за автоматическую калибровку датчика. Калибровка занимает примерно полсекунды и выполняется сразу после появления питания на модуле. Кроме того, микросхема фильтрует значения, компенсирует дрейф ёмкостного датчика и корректирует работу устройства при изменении температуры и влажности окружающей среды.
При каждом срабатывании сенсора загорается яркий красный светодиод. Это поможет при отладке проекта и пригодится для создания интерактивных панелей управления.
Подключение
Сенсорный модуль по своей сути аналогичен цифровой кнопке . Пока кнопка нажата, датчик отдаёт логическую единицу; когда кнопка не нажата — логический ноль.
В простом варианте модуль подключается к управляющей электронике как простая кнопка — одним .
Для этого используется левая группа контактов:
- Контакт S — сигнальный пин, подключаемый к цифровому входу контроллера.
- Контакт V — питание. Подключается к линии питания 3,3-5 В.
- Контакт G — подключается к земле.
В правой группе контактов используется только один пин — M. Он переключает режимы работы модуля. Две оставшиеся ноги используются для надёжной фиксации модуля на Troyka Slot Shield .
Переключение режима работы
По умолчанию модуль работает в режиме пониженного энергопотребления. Опрос датчика проводится раз в 80 миллисекунд. Это существенно экономит энергию аккумуляторов.
Если вам требуется увеличить отзывчивость интерфейса, подключите пин М к контроллеру и подайте на него логическую единицу. Модуль переключится в режим высокоскоростной обработки данных, интервал опроса сенсора уменьшится до 10 миллисекунд.
Комплектация
- 1× Плата-модуль
Характеристики
- Напряжение питания: 3,3-5 В
- Контроллер сенсора: AT42QT1010
- Интерфейс кнопки: цифровой, бинарный
- Габариты: 25×25 мм
Для некоторых электротехнических устройств имеется необходимость в сенсорном включении, то есть начало или конец работы должно происходить при простом касании пальца руки к сенсорному контакту. Применить это можно в схемах электронных замков, сигнализаций, обычной техники, что упрощает её включение и выключение (всего лишь нужно прикоснуться).
В этой статье предлагаю достаточно простую электронную схему сенсорного включателя, которую может собрать практически любой человек. Состоит эта схема всего из нескольких электронных компонентов, главными из которых являются биполярные транзисторы, выполняющие роль усилителей сигнала. Ко входу (базе) первого транзистора подсоединяется сам провод сенсора (к которому нужно прикасаться). С выхода транзистора выходит усиленный в сотни раз сигнал, что подаётся на следующий элемент. Второй транзистор усиливает ещё больше уже до этого усиленный сигнал, ну и то же самое делает третий каскад схемы. В итоге мы из крайне малого сигнала, идущего от сенсора, получаем ток, что может зажечь светодиод (либо включить реле, что будет управлять тем или иным устройством).
Напомню, что биполярный транзистор представляет собой полупроводниковый элемент, имеющий три вывода (эмиттер, коллектор и база). Он способен усиливать электрический сигнал в 10-1000 раз. При подаче на управляющий вывод небольшого сигнала (где-то от 0,6 до 0,7 вольт) на выходе мы можем получить уже электрический ток и/или напряжение гораздо большей величины.
База является управляющим электродом, относительно эмиттера. То есть, от источника питания подается на базу (через ограничивающий резистор, создающий некое смещение) и коллектор определенная величина напряжения. При напряжении между базой и эмиттером до 0,6 вольт транзистор ещё будет закрыт (не будет пропускать через себя ток относительно эмиттера и коллектора). Повышая напряжение между базой и эмиттером уже от 0,6 и где-то до 0,7 вольт мы постепенно открывает транзистор от полностью закрытого состояния в полностью открытое. Следовательно, транзистор выполняет роль переменного резистора, который управляется небольшими токами и может изменять своё сопротивления от бесконечно большого до практически нулевого (всё же оно есть, хоть и весьма малое).
Резисторы в схеме простого сенсорного включателя, стоящие в цепи коллекторов, выполняют роль ограничителей тока. Их номиналы 1 мегаом, 1 килоом и 220 ом. Можно ставить маленькой мощности, небольшие по размеру (токи в схеме достаточно малые). В данной электрической схеме применены биполярные транзисторы типа КТ315 (подойдут с любым буквенным индексом). Эти транзисторы старотипные, найти их можно где угодно, и стоят они копейки (если их покупать). Заменить их можно на КТ3102 или любые другие, с похожими характеристиками. Эти транзисторы имеют проводимость n-p-n (новичкам стоит это учесть). Можно поставить в схему транзисторы и обратной проводимости (p-n-p) серии КТ361 или КТ3107, но тогда нужно будет поменять полярность на питании (на плюс подключать минус и наоборот).
Хочу заметить, что данная электрическая схема сенсора является не фиксированной, то есть выходное устройство будет срабатывать и работать только тогда, когда вы касаетесь входного сенсора. Как только вы перестанете касаться сенсора, то и выходное устройство также выключится.
Изначально в схему простого сенсорного включателя я поставил на выход обычный светодиод, который просто зажигался при касании сенсора. Если вместо светодиода поставить небольшое реле, то можно уже на выходе схемы иметь переключатель, что можно подключить к различным электрическим устройствам (звонку, лампочки, двигателю и т.д.). Параллельно катушки реле нужно будет припаять электролитический конденсатор небольшой ёмкости (где-то от 100 до 1000 микрофарад, и напряжением не менее чем у источника питания). А также подключить диод (обратное включение), что позволит исключить влияние на саму схему напряжения самоиндукции, возникающей на катушки реле. Диод подойдет любой!
P.S. Учтите, что светодиод имеет полярность! Если вы поставите его неправильно, то светиться он не будет. В случае использования реле учитывайте выходной ток транзистора. То есть, КТ315 может иметь на своём выходе силу тока не более 100 миллиампер. Следовательно, если поставить большую релюшку, у которой катушка потребляет большие токи, то транзистор может выйти из строя. Нужно ставить реле с соответствующим током на катушке или ставить более мощный биполярный транзистор на выходе схемы.
В данной статье представлены некоторые основные схемы построения емкостных датчиков прикосновений и обсуждения, как бороться с низкочастотным и высокочастотным шумом.
Предыдущая статья
Измерение изменений
Если вы читали предыдущую статью, то вы знаете, что суть емкостных датчиков прикосновений заключается в изменении емкости, которое происходит, когда объект (обычно палец человека) приближается к конденсатору. Присутствие пальца увеличивает емкость, так как:
- вводит вещество (т.е. человеческую плоть) с относительно высокой диэлектрической проницаемостью;
- обеспечивает проводящую поверхность, которая создает дополнительную емкость параллельно существующему конденсатору.
Конечно, сам факт того, что емкость изменяется, не особенно полезен. Для того, чтобы на самом деле реализовать емкостной датчик касаний, нам необходима схема, которая может измерять емкость с точностью, достаточной, чтобы идентифицировать увеличение емкости, вызванное наличием пальца. Существуют различные способы сделать это, некоторые довольно просты, другие более сложные. В данной статье мы рассмотрим два основных подхода для реализации емкостного сенсорного функционала: первый основан на постоянной времени RC (резистор-конденсатор) цепи, а второй основан на сдвигах частоты.
Постоянная времени RC цепи
Возможно, вы также испытываете чувства ностальгии по университету, когда видите экспоненциальную кривую, представляющую график напряжения во время заряда или разряда конденсатора. Возможно, кто-то при взгляде на эту кривую впервые понял, что высшая математика всё-таки имеет какое-то отношение к реальному миру, да и в век роботов, работающих на виноградниках , есть что-то привлекательное в простоте разряда конденсатора. В любом случае, мы знаем, что эта экспоненциальная кривая изменяется, когда изменяется либо резистор, либо конденсатор. Скажем, у нас есть RC цепь, состоящая из резистора 1 МОм и емкостного датчика касаний с типовой емкостью (без пальца) 10 пФ.
Мы можем использовать вывод входа/выхода общего назначения (настроенный, как выход) для заряда конденсатора до напряжения, соответствующего высокому логическому уровню. Затем нам необходимо разрядить конденсатор через большой резистор. Важно понимать, что вы не можете просто переключить состояние выхода на низкий логический уровень. Вывод I/O, сконфигурированный на выход, будет управлять сигналом низкого логического уровня, то есть, он создаст низкоомное соединение выхода с землей. Таким образом, конденсатор быстро разрядится через это низкое сопротивление — так быстро, что микроконтроллер не сможет обнаружить едва заметные временные изменения, созданные небольшими изменениями емкости. Что нам здесь нужно, так это вывод с большим входным сопротивлением, что заставит почти весь ток разряда течь через резистор, а это может быть достигнуто настройкой вывода для работы, как вход. Итак, сначала вы установите вывод, как выход, выдающий высокий логический уровень, а затем этап разряда, вызывается изменением режима работы вывода на вход. Результирующее напряжение будет выглядеть примерно следующим образом:
Если кто-то прикасается к датчику и тем самым создает дополнительную емкость 3 пФ, постоянная времени будет увеличиваться следующим образом:
По человеческим меркам время разряда не сильно отличается, но современный микроконтроллер, безусловно, может обнаружить это изменение. Скажем, у нас есть таймер с тактовой частотой 25 МГц; мы запускаем таймер, когда переключаем вывод в режим входа. Мы можем использовать таймер для отслеживания времени разряда, настроив этот же вывод действовать, как триггер, который инициирует событие захвата («захват» означает хранение значения таймера в отдельном регистре). Событие захвата произойдет, когда напряжение разряда пересечет порог низкого логического уровня вывода, например, 0,6 В. Как показано на следующем графике, разница во времени разряда с порогом 0,6 В составляет ΔT = 5.2 мкс.
С периодом тактовой частоты таймера 1/(25 МГц) = 40 нс, это ΔT соответствует 130 тактам. Даже если изменение емкости будет уменьшено в 10 раз, у нас всё равно будет разница в 13 тактов между нетронутым датчиком и датчиком, к которому прикоснулись.
Таким образом, идея заключается в многократном заряде и разряде конденсатора, контролируя время разряда; если время разряда превышает заданный порок, микроконтроллер предполагает, что палец вошел в «контакт» с конденсатором датчика касаний (я написал «контакт» в кавычках потому, что палец на самом деле никогда не касается конденсатора — как упоминалось в предыдущей статье, конденсатор отделен от внешней среды лаком на плате и корпусом устройства). Тем не менее, реальная жизнь немного сложнее, чем идеализированное обсуждение, представленное здесь; источники ошибок обсуждаются ниже, в разделе «Работа в реальности».
Переменный конденсатор, переменная частота
В реализации на базе изменения частоты емкостной датчик используется в качестве «С»-части в RC генераторе таким образом, что изменение емкости вызывает изменение частоты. Выходной сигнал используется в качестве входного для модуля счетчика, который подсчитывает количество фронтов или спадов, возникающих во время периода измерения. Когда приближающийся палец приводит к увеличению емкости датчика, частота выходного сигнала генератора уменьшается, и, таким образом, количество фронтов/спадов также уменьшается.
Так называемый релаксационный генератор (генератор колебаний, пассивные и активные нелинейные элементы которого не обладают резонансными свойствами) представляет собой основную схему, которая может использоваться для этой цели. Для этого в дополнение к конденсатору датчика касаний требуются несколько резисторов и компаратор. Кажется, это вызывает больше проблем по сравнению с методом заряда/разряда, который обсуждался выше, но если ваш микроконтроллер обладает встроенным модулем компаратора, это не так уж и плохо. Я не буду вдаваться в подробности схемы этого генератора, потому что, во-первых, он обсуждается во многих других местах, и, во-вторых, маловероятно, что вы захотите использовать этот метод генератора, когда есть много микроконтроллеров и отдельных микросхем, которые предлагают высокопроизводительную емкостную сенсорную функциональность. Если у вас нет другого выбора, кроме как создать свою собственную схему емкостного сенсора касаний, я думаю, что метода заряда/разряда, описанный выше более прост. В противном случае, сделайте свою жизнь немного проще, выбирая микроконтроллер со специальным аппаратным обеспечением для емкостного датчика касаний.
Примером встроенного модуля, основанного на релаксационном генераторе, является периферия емкостного датчика в микроконтроллерах EFM32 от Silicon Labs:
Мультиплексор позволяет частоте колебаний управляться восьмью различными конденсаторами датчиков касаний. С помощью быстрого переключения между каналами, контроллер может эффективно контролировать одновременно восемь сенсорных кнопок, так как рабочая частота микроконтроллера очень высока по сравнению со скоростью движения пальца.
Работа в реальности
Емкостная сенсорная система будет зависеть и от высокочастотного, и от низкочастотного шума.
Высокочастотный шум вызывает в измерениях времени разряда или количества фронтов незначительные изменения от отсчета к отсчету. Например, схема заряда/разряда без пальца, о которой говорилось выше, может иметь время разряда 675 тактов, затем 685 тактов, затем 665 тактов, затем 670 тактов и так далее. Значимость этого шума зависит от ожидаемого изменения времени разряда при поднесении пальца. Если емкость увеличивается на 30%, то ΔT будет составлять 130 тактов. Если наши высокочастотные изменения составляют только ±10 тактов, то мы можем легко отличить сигнал от шума.
Однако, увеличение емкости на 30% находится вблизи максимального значения изменения емкости, на которое мы можем рассчитывать. Если мы получим изменение только на 3%, ΔT составит 13 тактов, что слишком близко к уровню шума. Одним из способов уменьшения влияния шума является увеличение амплитуды сигнала, и вы можете сделать это за счет уменьшения физического расстояния, разделяющего печатный конденсатор и палец. Однако, часто механическая конструкция ограничена другими факторами, и вы уже больше не можете увеличить уровень сигнала. В этом случае вам необходимо понизить уровень шума, что может быть достигнуто путем усреднения. Например, каждое новое время разряда может сравниваться не с предыдущим временем разряда, а со средним значением последних 4 или 8 или 32 результатов измерений времени разряда. Метод, основанный на сдвиге частоты и описанный выше, автоматически включает усреднение, потому что небольшие изменения около средней частоты не будут существенно влиять на количество подсчитанных циклов в течение периода измерений, который более длительный по сравнению с периодом колебаний.
Низкочастотный шум относится к долговременным изменениям емкости датчика без прикосновения пальца; эти изменения могут быть вызваны условиями окружающей среды. Этот тип помехи не может быть усреднен, потому что изменения могут сохраняться в течение очель долгого периода времени. Таким образом, единственный способ эффективно бороться с низкочастотным шумом должен быть адаптивным: порог, используемы для обнаружения присутствия пальца, не может быть фиксированным значением. Вместо этого, он должен регулярно корректироваться на основе измеренных значений, которые не показывают значительные кратковременные изменения, такие как те, что вызваны приближением пальца.
Заключение
Методы реализации, обсуждаемые в данной статье, показывают, что емкостное определение касания не требует сложного аппаратного и программного обеспечения. Тем не менее, это универсальная, надежная технология, которая предоставить значительное улучшение производительности по сравнению с механическими альтернативами.


Ваш регион:
Самовывоз из офиса
Самовывоз из офиса в Москве
- При оформлении до 15:00 в будний день заказ можно забрать после 17:00 в тот же день, иначе — на следующий будний день после 17:00. Мы позвоним и подтвердим готовность заказа.
- Получить заказ можно с 10:00 до 21:00 без выходных после его готовности. Заказ будет ждать вас 3 рабочих дня. Если хотите продлить срок хранения, просто напишите или позвоните.
- Запишите номер своего заказа перед визитом. Он необходим при получении.
- Чтобы к нам пройти, предъявите на проходной паспорт, скажите, что вы в Амперку, и поднимитесь на лифте на 3-й этаж.
- бесплатно
Доставка курьером по Москве
Доставка курьером по Москве
- Доставляем на следующий день при заказе до 20:00, иначе — через день.
- Курьеры работают с понедельника по субботу, с 10:00 до 22:00.
- Оплатить заказ можно наличными при получении или же онлайн при оформлении заказа.
- 250 ₽
Доставка в пункт самовывоза
Доставка в пункт PickPoint
- PickPoint .
- Оплатить заказ можно наличными при получении или же онлайн при оформлении заказа.
- 240 ₽
Доставка курьером по Питеру
Доставка курьером по Санкт-Петербургу
- Доставляем через день при заказе до 20:00, иначе — через два дня.
- Курьеры работают с понедельника по субботу, с 11:00 до 22:00.
- При согласовании заказа можно выбрать трёхчасовой интервал доставки (самое раннее — с 12:00 до 15:00).
- Оплатить заказ можно наличными при получении или же онлайн при оформлении заказа.
- 350 ₽
Доставка в пункт самовывоза
Доставка в пункт PickPoint
- Доставка в пункт самовывоза — современный, удобный и быстрый способ получить свой заказ без звонков и ловли курьеров.
- Пункт самовывоза — это киоск с человеком или массив железных ящичков. Их ставят в супермаркетах, офисных центрах и других популярных местах. Ваш заказ окажется в том пункте, который выберите.
- Ближайший к себе пункт вы можете найти на карте PickPoint .
- Срок доставки — от 1 до 8 дней в зависимости от города. Например, в Москве это 1-2 дня; в Петербурге — 2—3 дня.
- Когда заказ прибудет в пункт выдачи, вы получите SMS с кодом для его получения.
- В любое удобное время в течение трёх дней вы можете прийти в пункт и с помощью кода из SMS получить заказ.
- Оплатить заказ можно наличными при получении или же онлайн при оформлении заказа.
- Стоимость доставки — от 240 руб в зависимости от города и габаритов заказа. Она рассчитывается автоматически во время оформления заказа.
- 240 ₽
Доставка в пункт самовывоза
Доставка в пункт PickPoint
- Доставка в пункт самовывоза — современный, удобный и быстрый способ получить свой заказ без звонков и ловли курьеров.
- Пункт самовывоза — это киоск с человеком или массив железных ящичков. Их ставят в супермаркетах, офисных центрах и других популярных местах. Ваш заказ окажется в том пункте, который выберите.
- Ближайший к себе пункт вы можете найти на карте PickPoint .
- Срок доставки — от 1 до 8 дней в зависимости от города. Например, в Москве это 1-2 дня; в Петербурге — 2—3 дня.
- Когда заказ прибудет в пункт выдачи, вы получите SMS с кодом для его получения.
- В любое удобное время в течение трёх дней вы можете прийти в пункт и с помощью кода из SMS получить заказ.
- Оплатить заказ можно наличными при получении или же онлайн при оформлении заказа.
- Стоимость доставки — от 240 руб в зависимости от города и габаритов заказа. Она рассчитывается автоматически во время оформления заказа.
Посылка Почтой России
Почта России
- Доставка осуществляется до ближайшего почтового отделения
в любом населённом пункте России
. - Тариф и сроки доставки диктует «Почта России». В среднем, время ожидания составляет 2 недели.
- Мы передаём заказ Почте России в течение двух рабочих дней.
- Оплатить заказ можно наличными при получении (наложенный платёж) или же онлайн при оформлении заказа.
- Стоимость рассчитывается автоматически во время заказа и в среднем должна составить около 400 рублей.
Доставка службой EMS
Доставка службой EMS
- Служба «EMS Почта России» работает быстрее и надёжнее обычной почты и доставляет до двери
покупателя. - Тариф и сроки доставки диктует служба EMS. В среднем по России время ожидания составляет 4-5 дней.
- Мы передаём заказ в EMS в течение двух рабочих дней.
- Оплатить заказ можно только онлайн при оформлении заказа.
- Стоимость рассчитывается автоматически во время оформления заказа и в среднем должна составить 400-800 рублей для России и 1500-2000 рублей для стран СНГ.
Помимо онлайн-магазина, товар также представлен:
Офис-магазин, м. Таганская
Офис-магазин, м. Таганская
Товары из офиса нельзя заказать через интернет или забронировать. Можно только прийти, схватить и бежать. Доступное количество актуально на момент загрузки страницы.
Офис находится в 5 минутах ходьбы от м. Таганская, по адресу Большой Дровяной переулок, дом 6 .
Скоро
Магазин-мастерская, м. Лиговский пр-т
Магазин-мастерская, м. Лиговский пр-т
Товары из магазина-мастерской нельзя заказать через интернет или забронировать. Можно только прийти, схватить и бежать. Доступное количество актуально на момент загрузки страницы.
Магазин-мастерская находится в трёх минутах пешком от метро Лиговский Проспект, на территории пространства «Лофт Проект Этажи», по адресу Лиговский проспект 74Д .
Ёмкостный датчик прикосновения работает как обычная кнопка, но в нём нет подвижных частей. Кнопка почувствует «нажатие» сквозь корпус устройства и сработает как бесконтактный концевик в проектах домашней автоматизации.
Сенсор работает через неметаллические материалы — пластмассу, картон, фанеру или стекло. Эту особенность можно использовать для создания скрытых или защищённых элементов управления.
Поместите модуль в герметичный корпус или спрячьте под лицевую панель устройства — кнопка почуствует приближение пальца даже через четырёхмиллиметровый слой диэлектрика.
Использование в качестве «кнопки» — не единственный вариант использования ёмкостных датчиков. Они отлично подойдут для контроля уровня воды в пластиковой бочке или стеклянном аквариуме.
Что на борту
Система определения прикосновения состоит из чувствительного элемента, блока измерения ёмкости датчика и логической схемы, реагирующей на изменение ёмкости при приближении объекта.
В качестве чувствительного элемента используется токопроводящий контур на лицевой части модуля.
Логика построена на базе микросхемы AT42QT1010 . Она отвечает за автоматическую калибровку датчика. Калибровка занимает примерно полсекунды и выполняется сразу после появления питания на модуле. Кроме того, микросхема фильтрует значения, компенсирует дрейф ёмкостного датчика и корректирует работу устройства при изменении температуры и влажности окружающей среды.
При каждом срабатывании сенсора загорается яркий красный светодиод. Это поможет при отладке проекта и пригодится для создания интерактивных панелей управления.
Подключение
Сенсорный модуль по своей сути аналогичен цифровой кнопке . Пока кнопка нажата, датчик отдаёт логическую единицу; когда кнопка не нажата — логический ноль.
В простом варианте модуль подключается к управляющей электронике как простая кнопка — одним .
Для этого используется левая группа контактов:
- Контакт S — сигнальный пин, подключаемый к цифровому входу контроллера.
- Контакт V — питание. Подключается к линии питания 3,3-5 В.
- Контакт G — подключается к земле.
В правой группе контактов используется только один пин — M. Он переключает режимы работы модуля. Две оставшиеся ноги используются для надёжной фиксации модуля на Troyka Slot Shield .
Переключение режима работы
По умолчанию модуль работает в режиме пониженного энергопотребления. Опрос датчика проводится раз в 80 миллисекунд. Это существенно экономит энергию аккумуляторов.
Если вам требуется увеличить отзывчивость интерфейса, подключите пин М к контроллеру и подайте на него логическую единицу. Модуль переключится в режим высокоскоростной обработки данных, интервал опроса сенсора уменьшится до 10 миллисекунд.
Комплектация
- 1× Плата-модуль
Характеристики
- Напряжение питания: 3,3-5 В
- Контроллер сенсора: AT42QT1010
- Интерфейс кнопки: цифровой, бинарный
- Габариты: 25×25 мм
Здесь будут рассмотрены датчики звука и касания, чаще всего использующиеся в составе сигнализаций.
Модуль датчика касания KY-036
Модуль, по сути, представляет собой сенсорную кнопку. Как понимает автор, принцип действия устройства основан на том, что, прикасаясь к контакту датчика человек, становится антенной для приема наводок на частоте бытовой сети переменного тока . Эти сигналы поступают на компаратор LM393YD
Габариты модуля 42 х 15 х 13 мм, масса 2,8 г., в плате модуля имеется крепежное отверстие диаметром 3 мм. Индикация питания осуществляется светодиодом L1.
При срабатывании датчика загорается (мигает) светодиод L2. Потребляемый ток 3,9 мА в ждущем режиме и 4,9 мА при срабатывании.

Не совсем ясно, какой порог чувствительности датчика должен регулироваться переменным резистором. Данные модули с компаратором LM393YD являются стандартными и к ним припаивают различные датчики, получая, таким образом, модули различного назначения. Выводы питания «G» — общий провод, «+» – питание +5В. На цифровом входе «D0» присутствует низкий логический уровень, при срабатывании датчика на выходе появляется импульсы с частотой 50 Гц. На контакте «A0» присутствует инвертированный относительно «D0» сигнал . В целом модуль срабатывает дискретно, как кнопка, в чем можно убедиться с помощью программы LED_with_button .
Датчик касания позволяет использовать в качестве кнопки управления любую металлическую поверхность, отсутствие движущихся частей должно положительно сказаться на долговечности и надежности.
Модуль датчика звука KY-037
Модуль должен срабатывать от звуков, громкость которых превышает заданный предел. Чувствительным элементом модуля является микрофон, работающий вместе с компаратором на микросхеме LM393YD .

Габариты модуля 42 х 15 х 13 мм, масса 3,4 г., аналогично предыдущему случаю в плате модуля имеется крепежное отверстие диаметром 3 мм. Индикация питания осуществляется светодиодом L1. Выводы питания «G» — общий провод, «+»– питание +5В.

Потребляемый ток 4,1 мА в ждущем режиме и 5 мА при срабатывании.

На выводе «A0» напряжение изменяется в соответствии уровнем громкости сигналов, принимаемых микрофоном, с повышением громкости показания уменьшаются, в этом можно убедиться с помощью программы AnalogInput2.

На цифровом входе «D0» присутствует низкий логический уровень, при превышении заданного порога низкий уровень меняется на высокий. Порог срабатывания можно регулировать переменным резистором. При этом загорается светодиод L2. При резком громком звуке наблюдается задержка в 1-2 с при обратном переключении.
В целом полезный датчик для организации системы умного дома или сигнализации.
Модуль датчика звука KY-038
С первого взгляда модуль кажется аналогичным предыдущему. Чувствительным элементом модуля является микрофон, следует отметить, что по данному модулю в сети не так уж много информации .
Габариты модуля 40 х 15 х 13 мм, масса 2,8 г., аналогично предыдущему случаю в плате модуля имеется крепежное отверстие диаметром 3 мм. Индикация питания осуществляется светодиодом L1. Выводы питания «G» — общий провод, «+»– питание +5В.

При срабатывании геркона загорается светодиод L2. Потребляемый ток 4,2 мА в ждущем режиме и до 6 мА при срабатывании.

На выводе «A0» при повышении уровня громкости происходит увеличение показаний (использована программа AnalogInput2).

На контакте «D0» присутствует низкий логический уровень, при срабатывании датчика он меняется на высокий. Порог срабатывания настраивается подстроечным резистором (использована программа LED_with_button).
Этот датчик действительно практически не отличается от предыдущего, но взаимозаменяемость их возможна не всегда, т.к. при изменении уровня громкости характер изменения уровня напряжение на аналоговом выходе различается.
Выводы
На этом автор заканчивает обзор большого набора из различных датчиков для аппаратной платформы Arduino. В целом данный набор произвел на автора смешанное впечатление. В набор входят как достаточно сложные датчики, так и совсем простые конструкции. И если в случае наличия на плате модуля токоограничительных резисторов, светодиодных индикаторов и т.п. автор готов признать полезность подобных модулей, то небольшая часть модулей представляет собой одиночный радиоэлемент на плате. Зачем нужны такие модули, остается непонятным (видимо крепление на стандартных платах служит целям унификации). В целом набор является неплохим способом познакомиться с большинством широко распространенных датчиков, применяемых в Arduino проектах.
Полезные ссылки
- http://arduino-kit.ru/catalog/id/modul-datchika-kasaniya
- http://www.zi-zi.ru/module/module-ky036
- http://robocraft.ru/blog/arduino/57.html
- http://arduino-kit.ru/catalog/id/modul-datchika-zvuka
- http://www.zi-zi.ru/module/module-ky037
- http://arduino-kit.ru/catalog/id/modul-datchika-zvuka_
- http://smart-boards.ml/module-audiovideo-4.php
Электор 2008 №7-8
Работа ёмкостных датчиков прикосновения основана на электрической ёмкости человеческого тела. Например, когда близко к датчику подносят палец, то это создаёт ёмкость между датчиком и землёй, лежащую в диапазоне 30…100 пФ. Этот эффект может быть использован в датчиках приближения и переключателях, управляемых прикосновением.
Сенсорные ёмкостные датчики имеют очевидные преимущества по сравнению с другими датчиками (например, срабатывающими от наводок частотой 50/60 Гц или измеряющими сопротивление), но они более трудоёмки в реализации. Производители микросхем, такие как Microchip в прошлом создали специальные ИС для этих целей. Однако и сейчас можно создать надёжный ёмкостный детектор и/или переключатель, используя только небольшое число стандартных компонентов.
В этой схеме мы детектируем изменения ширины импульсов сигнала, возникающие при касании контакта. На рисунке 1 можно рассмотреть следующие узлы (слева направо):
Рис. 1. IC1 — 561ТЛ1
Генератор прямоугольных импульсов, выполненный на триггере Шмитта (ИС CD4093);
RC цепь с гасящим диодом, за которыми идёт триггер Шмитта/контактная пластина с изолирующим конденсатором ёмкостью 470 пФ;
— Интегрирующая RC цепь, преобразующая изменения ширины импульсов в напряжение. Это напряжение лежит в районе 2,9…3,2 вольт, когда до пластины дотрагиваются, и 2,6 вольт в другом случае.
— Компаратор LM 339 используется для сравнения напряжения в точке C с образцовым напряжением в точке D. Последнее составляет около 2,8 В и устанавливается делителем напряжения.
Как только произойдёт касание сенсорной пластины, выход схемы станет активным. Для пояснения работы схемы на рисунке 2 приведены осциллограммы сигналов в разных точках. Пунктирная линия показывает состояние при касании пластины датчика, сплошная линия — при отсутствии касания.
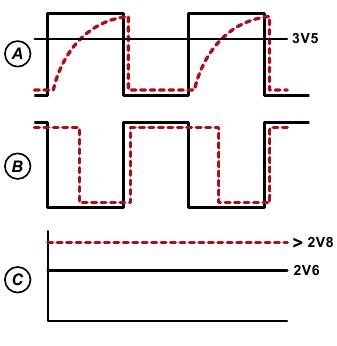
Рис. 2. Осциллограммы сигналов а разных точках.
Образцовое напряжение в точке D настраивается один раз с помощью делителя R4/R5 (изменяя значение R4). Величина этого напряжения сильно зависит от площади поверхности пластины-датчика (обычно несколько квадратных сантиметров). Большая площадь поверхности пластины увеличивает ёмкость и напряжение в точке C тем не менее будет больше, по сравнению с тем напряжением, когда пластины не касались. Образцовое напряжение в точке D должно быть установлено ближе к значению 3,4 В. Датчик прикосновения может так же работать с пластинами большой площади (например, можно использовать в качестве сенсора весь корпус).
Выходной сигнал может быть использован для включения различных нагрузок. Во многих случаях рекомендуется добавить на выход один триггер Шмитта, особенно если выход соединён с цифровым входом.
Вим Абуйс
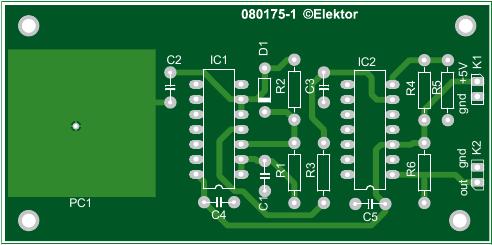
Рис. 4. Расположение компонентов на печатной плате.


Рис. 5. Печатная плата.

Рис. 6. Печатная плата (зеркальный вид).
Для некоторых электротехнических устройств имеется необходимость в сенсорном включении, то есть начало или конец работы должно происходить при простом касании пальца руки к сенсорному контакту. Применить это можно в схемах электронных замков, сигнализаций, обычной техники, что упрощает её включение и выключение (всего лишь нужно прикоснуться).
В этой статье предлагаю достаточно простую электронную схему сенсорного включателя, которую может собрать практически любой человек. Состоит эта схема всего из нескольких электронных компонентов, главными из которых являются биполярные транзисторы, выполняющие роль усилителей сигнала. Ко входу (базе) первого транзистора подсоединяется сам провод сенсора (к которому нужно прикасаться). С выхода транзистора выходит усиленный в сотни раз сигнал, что подаётся на следующий элемент. Второй транзистор усиливает ещё больше уже до этого усиленный сигнал, ну и то же самое делает третий каскад схемы. В итоге мы из крайне малого сигнала, идущего от сенсора, получаем ток, что может зажечь светодиод (либо включить реле, что будет управлять тем или иным устройством).
Напомню, что биполярный транзистор представляет собой полупроводниковый элемент, имеющий три вывода (эмиттер, коллектор и база). Он способен усиливать электрический сигнал в 10-1000 раз. При подаче на управляющий вывод небольшого сигнала (где-то от 0,6 до 0,7 вольт) на выходе мы можем получить уже электрический ток и/или напряжение гораздо большей величины.
База является управляющим электродом, относительно эмиттера. То есть, от источника питания подается на базу (через ограничивающий резистор, создающий некое смещение) и коллектор определенная величина напряжения. При напряжении между базой и эмиттером до 0,6 вольт транзистор ещё будет закрыт (не будет пропускать через себя ток относительно эмиттера и коллектора). Повышая напряжение между базой и эмиттером уже от 0,6 и где-то до 0,7 вольт мы постепенно открывает транзистор от полностью закрытого состояния в полностью открытое. Следовательно, транзистор выполняет роль переменного резистора, который управляется небольшими токами и может изменять своё сопротивления от бесконечно большого до практически нулевого (всё же оно есть, хоть и весьма малое).
Резисторы в схеме простого сенсорного включателя, стоящие в цепи коллекторов, выполняют роль ограничителей тока. Их номиналы 1 мегаом, 1 килоом и 220 ом. Можно ставить маленькой мощности, небольшие по размеру (токи в схеме достаточно малые). В данной электрической схеме применены биполярные транзисторы типа КТ315 (подойдут с любым буквенным индексом). Эти транзисторы старотипные, найти их можно где угодно, и стоят они копейки (если их покупать). Заменить их можно на КТ3102 или любые другие, с похожими характеристиками. Эти транзисторы имеют проводимость n-p-n (новичкам стоит это учесть). Можно поставить в схему транзисторы и обратной проводимости (p-n-p) серии КТ361 или КТ3107, но тогда нужно будет поменять полярность на питании (на плюс подключать минус и наоборот).
Хочу заметить, что данная электрическая схема сенсора является не фиксированной, то есть выходное устройство будет срабатывать и работать только тогда, когда вы касаетесь входного сенсора. Как только вы перестанете касаться сенсора, то и выходное устройство также выключится.
Изначально в схему простого сенсорного включателя я поставил на выход обычный светодиод, который просто зажигался при касании сенсора. Если вместо светодиода поставить небольшое реле, то можно уже на выходе схемы иметь переключатель, что можно подключить к различным электрическим устройствам (звонку, лампочки, двигателю и т.д.). Параллельно катушки реле нужно будет припаять электролитический конденсатор небольшой ёмкости (где-то от 100 до 1000 микрофарад, и напряжением не менее чем у источника питания). А также подключить диод (обратное включение), что позволит исключить влияние на саму схему напряжения самоиндукции, возникающей на катушки реле. Диод подойдет любой!
P.S. Учтите, что светодиод имеет полярность! Если вы поставите его неправильно, то светиться он не будет. В случае использования реле учитывайте выходной ток транзистора. То есть, КТ315 может иметь на своём выходе силу тока не более 100 миллиампер. Следовательно, если поставить большую релюшку, у которой катушка потребляет большие токи, то транзистор может выйти из строя. Нужно ставить реле с соответствующим током на катушке или ставить более мощный биполярный транзистор на выходе схемы.
В системе СИ основными
единицами считаются масса, длина и время, в то время как сила и ускорение – производными
единицами. В Британской и американской системах единиц основными единицами считаются сила, длина и время. Единица измерения силы является одной из фундаментальных физических величин. Измерение сил проводится и при проведении механических исследований, и в гражданском строительстве, и при взвешивании объектов, и при изготовлении протезов и т.д. При определении давления также требуется измерение силы. Считается, что при работе с твердыми объектами измеряется сила, а при работе с жидкостями и газами определяется давление. Это значит, что сила рассматривается тогда, когда действие приложено к конкретной точке, а давление определяется тогда, когда сила распределена по сравнительно большой площади.
Датчики силы можно разделить на два класса: количественные и качественные. Количественные датчики измеряют силу и представляют ее значение в электрических единицах. Примерами таких датчиков являются динамометрические элементы и тензодатчики. Качественные датчики — это пороговые устройства, чья функция заключается не в количественном определении значения силы, а в детектировании превышения заданного уровня приложенной силы. Примером таких устройств является клавиатура компьютера, каждая клавиша которой замыкает соответствующий контакт только при нажатии на нее с определенной силой. Качественные датчики часто используются для детектирования движения и положения объектов. Коврик у двери, реагирующий на давление, приложенное к нему, и пьезоэлектрический кабель также являются примерами качественных датчиков давления.
Методы измерения силы можно разделить на следующие группы:
1. Уравновешивание неизвестной силы силой тяжести тела известной массы
2. Измерение ускорения тела известной массы, к которому приложена неизвестная сила
3. Уравновешивание неизвестной силы электромагнитной силой
4. Преобразование силы в давление жидкости и измерение этого давления
5. Измерение деформации упругого элемента системы, вызванной неизвестной силой
В современных датчиках наиболее часто применяется 5 метод, а методы 3 и 4 используются сравнительно редко.
В большинстве датчиков не происходит прямого преобразования силы в электрический сигнал. Для этого обычно требуется несколько промежуточных этапов. Поэтому, как правило, датчики силы являются составными устройствами. Например, датчик силы часто представляет собой комбинацию преобразователя сила-перемещение и детектора положения (перемещения). Это может быть простая спиральная пружина, уменьшение длины которой, вызванное приложенной силой сжатия, будет пропорционально ее коэффициенту упругости.
На рис.1А показан датчик, состоящий из пружины и детектора перемещений, реализованного на основе линейно регулируемого дифференциального трансформатора (ЛРДТ). В линейном диапазоне изменения длины пружины напряжение на выходе ЛРДТ пропорционально приложенной силе. На рис. 1Б представлен еще один вариант датчика силы, состоящий из гофрированной мембраны, заполненной жидкостью, непосредственно на которую и действует сила, и датчика давления. Гофрированная мембрана, распределяя силу на входе по поверхности чувствительного элемента датчика давления, играет роль преобразователя сила-давление.
 Тензодатчик
Тензодатчик
— это гибкий резистивный чувствительный элемент, сопротивление которого пропорционально приложенному механическому напряжению (величине деформации). Все тензодатчики построены на основе ранее упоминавшегося пьезорезистивного эффекта. Проволочный тензодатчик представляет собой резистор, наклеенный на гибкую подложку, которая в свою очередь прикрепляется на объект, где измеряется сила или напряжение. При этом должна обеспечиваться надежная механическая связь между объектом и тензочувствительным элементом, в то время как провод резистора должен быть электрически изолирован от объекта. Коэффициенты теплового расширения подложки и провода должны быть согласованы. Для получения хорошей чувствительности датчик должен иметь длинные продольные участки и короткие поперечные (рис. 2). Это делается для того, чтобы чувствительность в поперечном направлении не превышала 2% от продольной чувствительности. Для измерения напряжeний в разных направлениях меняется конфигурация датчиков. Следует отметить, что полупроводниковые тензочувствительные элементы обладают довольно сильной чувствительностью к изменениям температуры, поэтому в интерфейсных схемах или в самих датчиках необходимо предусматривать цепи температурной компенсации.
Тактильные датчики
— это специальный класс преобразователей силы или давления, которые характеризуются небольшой толщиной. Эти датчики полезны в случаях, когда сила или давление измеряются между двумя поверхностями, расположенными близко друг к другу. Такие датчики часто используются в робототехнике, например, их устанавливают на «пальцы» механических приводов для обеспечения обратной связи при контакте с объектом — это напоминает то, как работают тактильные сенсоры кожи человека. Датчики касания используются в сенсорных дисплеях, клавиатурах и других устройствах, где необходимо реагировать на физическое прикосновение. Тактильные датчики широко применяются в биомедицине, для определения прикуса зубов и правильности установки коронок в стоматологической практике, а также при исследовании давления на ноги человека при ходьбе. Иногда при проведении операций протезирования их устанавливают в искусственные суставы для корректировки положения и т.д. В строительстве и на механических производствах тактильные датчики используются для определения сил, действующих на закрепленные устройства.
Для изготовления тактильных чувствительных элементов используются несколько методов. В некоторых из них на поверхности объекта формируется специальный тонкий слой из материала, чувствительного к механическим напряжениям. На рис. 3 показан простой тактильный датчик, обеспечивающий функции включения-выключения, состоящий из двух листов фольги и прокладки. Внутри прокладки сделаны круглые (или любой другой необходимой формы) отверстия. Один из листов фольги заземлен, а второй подсоединен к нагрузочному резистору. Если требуется контролировать несколько чувствительных зон, используется мультиплексор. Когда к верхнему проводнику прикладывается внешняя сила над отверстием в прокладке, он прогибается и соприкасается с нижним проводником, тем самым устанавливая с ним электрический контакт, заземляющий нагрузочный резистор. При этом выходной сигнал становится равным нулю, что свидетельствует о приложенной силе. Верхний и нижний проводники могут изготавливаться методом трафаретной печати проводящими чернилами на подложке. Чувствительные зоны таких датчиков определяются рядами и колонками проводников, нанесенных чернилами. Прикосновение в определенному участку чувствительной поверхности приводит к замыканию соответствующих ряда и колонки, что показывает локализацию приложенной силы. Хорошие тактильные датчики получаются на основе пьезоэлектрических пленок, которые используются как в пассивном, так и в активном режимах. Многие тактильные датчики выполняют функции сенсорных переключателей. В отличие от традиционных переключателей, надежность контактов которых сильно снижается при попадании на них влаги и пыли, пьезоэлектрические ключи, благодаря своему монолитному исполнению, могут работать в неблагоприятных условиях окружающей среды.
Другой разновидностью тактильных датчиков является пьезорезистивный
чувствительный элемент. Он изготавливается из материалов, чье электрическое сопротивление зависит от приложенного механического напряжения или давления. К таким материалам относятся проводящие эластомеры или пасты, чувствительные изменению давления. Проводящие эластомеры изготавливаются из силиконовой резины, полиуретана и других материалов, в состав которых входят проводящие частицы или волокна. Например, проводящая резина получается при введении в обычную резину угольного порошка. Принцип действия эластомерных датчиков основан либо на изменении площади контактов при сдавливании эластомера между двумя проводящими пластинами, либо на изменении толщины эластомерного слоя. В зависимости от величины внешней силы, действующей на датчик, меняется площадь контактной зоны между прижимным устройством и эластомером, в результате чего изменяется электрическое сопротивление.
Более тонкие пьезорезистивные тактильные датчики получаются из полупроводниковых полимеров, сопротивление которых также зависит от давления. Конструкция таких датчиков напоминает мембранный переключатель. По сравнению с тензодатчиками пьезорезистивные чувствительные элементы обладают более широким динамическим диапазоном.
Пьезоэлектрические датчики силы
Рассмотренные пьезоэлектрические тактильные датчики не предназначены для проведения точных измерений силы. Однако на основе того же пьезоэлектрического эффекта можно реализовать и прецизионные датчики силы, как активные, так и пассивные. При разработке таких датчиков всегда следует помнить, что пьезоэлектрические устройства не могут измерять стационарные процессы. Это означает, что пьезоэлектрические датчики силы преобразуют изменения силы в переменный электрический сигнал, но при этом они никак не реагируют на постоянное значение внешней силы. Поскольку приложенные силы могут изменять некоторые свойства материалов, при разработке активных датчиков необходимо учитывать всестороннее влияние сигналов возбуждения. На рис. 4 показан вариант активного датчика силы. При проведении количественных измерений при помощи таких датчиков следует помнить, что его диапазон измерения зависит от частоты механического резонанса применяемого пьезоэлектрического кристалла. Принцип действия таких датчиков основан на том, что при механической нагрузке кварцевых кристаллов определенных срезов, используемых в качестве резонаторов в электронных генераторах, происходит сдвиг их резонансной частоты.
Электор 2008 №7-8
Работа ёмкостных датчиков прикосновения основана на электрической ёмкости человеческого тела. Например, когда близко к датчику подносят палец, то это создаёт ёмкость между датчиком и землёй, лежащую в диапазоне 30…100 пФ. Этот эффект может быть использован в датчиках приближения и переключателях, управляемых прикосновением.
Сенсорные ёмкостные датчики имеют очевидные преимущества по сравнению с другими датчиками (например, срабатывающими от наводок частотой 50/60 Гц или измеряющими сопротивление), но они более трудоёмки в реализации. Производители микросхем, такие как Microchip в прошлом создали специальные ИС для этих целей. Однако и сейчас можно создать надёжный ёмкостный детектор и/или переключатель, используя только небольшое число стандартных компонентов.
В этой схеме мы детектируем изменения ширины импульсов сигнала, возникающие при касании контакта. На рисунке 1 можно рассмотреть следующие узлы (слева направо):
Рис. 1. IC1 — 561ТЛ1
Генератор прямоугольных импульсов, выполненный на триггере Шмитта (ИС CD4093);
RC цепь с гасящим диодом, за которыми идёт триггер Шмитта/контактная пластина с изолирующим конденсатором ёмкостью 470 пФ;
— Интегрирующая RC цепь, преобразующая изменения ширины импульсов в напряжение. Это напряжение лежит в районе 2,9…3,2 вольт, когда до пластины дотрагиваются, и 2,6 вольт в другом случае.
— Компаратор LM 339 используется для сравнения напряжения в точке C с образцовым напряжением в точке D. Последнее составляет около 2,8 В и устанавливается делителем напряжения.
Как только произойдёт касание сенсорной пластины, выход схемы станет активным. Для пояснения работы схемы на рисунке 2 приведены осциллограммы сигналов в разных точках. Пунктирная линия показывает состояние при касании пластины датчика, сплошная линия — при отсутствии касания.

Рис. 2. Осциллограммы сигналов а разных точках.
Образцовое напряжение в точке D настраивается один раз с помощью делителя R4/R5 (изменяя значение R4). Величина этого напряжения сильно зависит от площади поверхности пластины-датчика (обычно несколько квадратных сантиметров). Большая площадь поверхности пластины увеличивает ёмкость и напряжение в точке C тем не менее будет больше, по сравнению с тем напряжением, когда пластины не касались. Образцовое напряжение в точке D должно быть установлено ближе к значению 3,4 В. Датчик прикосновения может так же работать с пластинами большой площади (например, можно использовать в качестве сенсора весь корпус).
Выходной сигнал может быть использован для включения различных нагрузок. Во многих случаях рекомендуется добавить на выход один триггер Шмитта, особенно если выход соединён с цифровым входом.
Вим Абуйс

Рис. 4. Расположение компонентов на печатной плате.

Рис. 5. Печатная плата.
Рис. 6. Печатная плата (зеркальный вид).
Наверное уже никому в наше время не нужно объяснять, что такое тачпад? Этим удобным манипулятором снабжены все современные ноутбуки. Вместо джойстика или мышки, для перемещения курсора и кликов мы используем тачпад, или, по-научному, сенсорную панель.
В этом уроке мы будем работать с простым ёмкостным датчиком, который позволяет отследить всего одно касание (вот он, на рисунке справа). Наша задача, связать касание датчика пальцем с каким-нибудь действием, скажем, с излучением звука зуммером. Трогаем датчик — зуммер пищит. Не трогаем — молчит.
Для решения этой задачи нам понадобится соединить вместе контроллер Ардуино Уно, зуммер, и, собственно, сам датчик. В качестве последнего будем использовать небольшую платку на базе сенсорного чипа TTP223. Для питания устройства годится напряжение в диапазоне от 2 до 5.5 Вольт.
Данный датчик является цифровым, а значит он выдает только одно из двух возможных значений: истина или ложь. В электронике это соответствует высокому и низкому уровню напряжения, соответственно.
1. Подключение
Использованный нами в уроке ёмкостный датчик имеет три контакта:
- VCC — питание +5В;
- GND — земля;
- OUT — сигнал.
Как и все прочие цифровые датчики, линию OUT
мы подключаем к любому свободному цифровому входу Ардуино Уно. Традиционно, используем для работы с датчиком вход №2. Получившаяся схема будет иметь вид:
Внешний вид макета

2. Программа
Теперь попробуем оживить всё это. Все что нам потребуется — это считывать состояние вывода №2 на каждом такте программы, и в зависимости от полученного значения, включать или выключать зуммер. Вот что у нас получается:
Int capPin = 2;
int buzzPin = 11;
void setup() {
pinMode(capPin, INPUT);
pinMode(buzzPin, OUTPUT);
}
void loop() {
if(digitalRead(capPin))
digitalWrite(buzzPin, HIGH);
else
digitalWrite(buzzPin, LOW);
}
Наконец, записываем программу на Ардуино Уно, и смотрим что получилось!
Cтраница 1
Датчики касания используются просто для обнаружения факта контакта с объектом. Датчиком касания может служить простейший микровыключатель. Датчики механических напряжений используются для измерения величины силы, возникающей в месте контакта. Обычно в качестве сенсоров, измеряющих усилия, применяют тензодатчики.
В токарных станках датчики касания применяются для контроля размеров заготовки, обработанной детали и режущей кромки инструмента. Вопросы диагностирования роботов (применяются антропоморфные и портальные роботы, встроенные в токарный станок, и внешние, работающие в цилиндрической системе координат) рассмотрены в гл.
Для измерения износа прямыми методами применяют датчики касания, которые регистрируют либо размерный износ, либо, при их перемещении, износ по задней поверхности. Конструкция датчика приведена на рис. 4.8, а. Корпус 4 закрепляется на подвижном узле / станка. В обмотке электромагнита создается переменное магнитное поле, вызывающее колебания наконечника. При касании наконечником блока его колебания нарушаются, что регистрируется электронной системой 8 с усилителем 7, а координаты соответствуют измеряемому размеру. Датчик защищают от стружки. Его применяют на станках с ЧПУ и в ГПС не только для измерения износа, но и для определения фактических координат вершины лезвия инструмента с целью автоматической корректировки управляющих программ.
Принцип работы проволочного тактильного датчика (датчика касания) показан на рис. 5.26. Робот автоматически по координатам двух базовых точек А и В, определяемых тактильным датчиком на угловом соединении, по скорректированной программе отыскивает требуемое место начала сварки (точку С), если отклонение стыкового соединения от исходного положения вызвано его параллельным смещением. В случае, если смещение стыкового соединения от исходного положения вызвано его параллельным смещением с разворотом относительно точки сварки, то для корректировки программы позиционирования роботом горелки в начальную точку сварки необходимо определить датчиком координаты как минимум трех базовых точек на элементах соединения.
Нулевые головки обычно конструируются на базе датчиков касания, в качестве которых широко используются электро -, радио — и виброконтактные датчики. Эти головки, называемые еще головками касания, делятся на два класса: с изменяющимся и фиксированным нулевым положением измерительного наконечника.
Рассмотрим особенности укзззнных выше устройств при использовании их в качестве датчика касания в специфических условиях цеха ртутного электролиза.
Очувствление схватов и других исполнительных органов манипулятора выполняют датчики захватного усилия 6 и датчики касания 7 при взаимодействии ПР с внешней средой.
Сварочная часть ПР включает: сварочный выпрямитель; сварочную горелку; кронштейны крепления; механизм подачи сварочной проволоки; датчик касания заготовки для сварки; устройство управлением датчика касания; необходимое количество кабелей; баллон с инертным газом, редуктор с расходомером и подогревателем газа; шланги и рукава.