Ну что друзья хватит читать про и пускать слюни на красивые картинки и потрясное видео снятое дорогущими коптерами. Мы с вами тоже кое что можем, даже если не заработали на летающих монстров. Давайте построим себе продвинутый и маневренный, многофункциональный квадрокоптер. Для этого не заморачиваясь на суперсложности возьмем и соберем из готового китайского набора.
Это будет квадрокоптер на раме 450 с полётным контроллером APM (Arducopter). В комплект кита входит:
В видеоролике вы найдете подробнейшую видео-инструкцию по сборке квадрокоптера и подключению электроники. Советы и рекомендации по выбору источников питания и дополнительного оборудования. Автор подготовил для вас подробное и наглядное пособие по первоначальной прошивке и настройке контроллера управляющего коптером APM.
В частности очень подробно описан весь процесс настройки и калибровки APM, от калибровки самого АРМ до настроект пульта управления коптером. В качестве пульта управления автор предлагает взять надежный и проверенный FlySky i6. Видео полностью охватывает весь процесс сборки и настройки квадрокоптера с камерой, своими руками с нуля от распаковки кита до первого полёта!
Основной набор комплектующих для сборки коптера
Скидки от 10.5% до 30% на покупки с Aliexpress!
- Возврат суммы скидки на карту http://epngo.bz/cashback_index/d366a
- Скидочный плагин для браузера http://epngo.bz/cashback_install_plugin/d366a
- Двойные скидки на АлиЭкспресс
Для того чтобы собрать квадрокоптер с камерой своими руками, нужно разделить сборку на два этапа. Первый этап это сборка самого квадрокоптера. Второй – подключение к нему камеры.
Итак, первый этап.
Рецепт сборки квадрокоптера своими руками
Для сборки квадрокоптера нам понадобятся следующее:
- четыре двигателя для квадрокоптера;
- четыре регулятора оборотов;
- четыре воздушных винта (пропеллера), можно с запасом;
- силовой разветвитель 3,5 мм;
- настраиваемая плата через usb для управления квадрокоптером;
- четыре аккумулятора или более, чтобы получить максимум удовольствия от полета;
- зарядное устройство для подзарядки аккумуляторов;
- устройство радиоуправления квадрокоптером (продается вместе с приемником и передатчиком);
- дополнительные платы для соединения приемника с “мозгами” квадрокоптера;
- провода в силиконовой оболочке для моторов, по две штуки красного и черного;
Это все что касается механизмов и управления.
Рама для квадрокоптера своими руками
Чтобы наш квадрокоптер чувствовал себя уверенно в полете, его нужно снабдить неким скелетом, на котором будут держаться все механизмы управления. Существует два подхода к решению этой задачи:
- готовая рама для квадрокоптера;
- рама собранная своими руками;
Чтобы выбрать наиболее подходящий вариант для Вас, нужно понимать некоторые нюансы. Если приобрести готовую раму, то как правило на нее уже можно все прикрутить и можно запускать в полет. Но если, какая-нибудь деталь будет повреждена при падении или неаккуратном использовании, ожидание этой детали займет некоторое время, пока она будет доставлена курьерскими службами на ваш адрес.
Что касается сборной рамы своими руками из подручных средств, то в этом случае нужно будет повозиться, чтобы все ровно вырезать и прикрепить. В случае каких-либо казусов, поломанную деталь можно будет легко заменить.
Самым распространенным вариантом для изготовления рамы из подручных средств, являются пластиковые трубы, которые применяют при строительстве для проводки проводов. Их свойства идеально подходят для крепления всех необходимых элементов управления, двигателей. Чтобы их прикрутить (двигатели), можно использовать крепления, те что используют для крепления труб к стенам при проводке проводов.
С помощью таких труб получается довольно-таки хорошая конструкция, на которой надежно можно закрепить все детали квадрокоптера и и камеру. Итак, у нас почти готов квадрокоптер с камерой своими руками, осталось все это правильно собрать и отправиться на испытательные полеты.
Квадрокоптер с камерой своими руками: видео процесса сборки
Весь процесс по сборке квадрокоптера своими руками представлен в этом видео. Смотрим.
Ниже представлены фото, которые я нашел в интернете. На них представлены квадрокоптеры с камерой, которые были собраны своими руками из подручных средств.
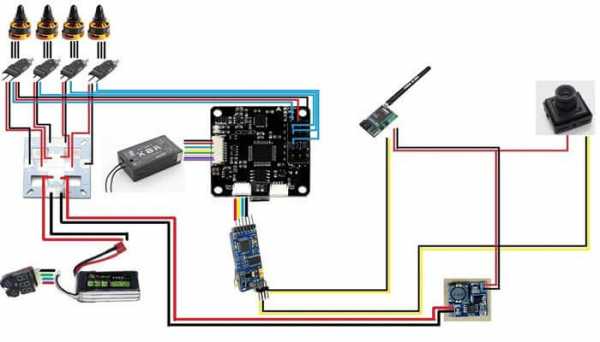
Как подключить электронику всего квадрокоптера
Русифицированную инструкцию мне найти не удалось, спасибо моему другу который перевел с английского на русский эту инструкцию для вас.

При подключении моторов, придется продлить провода, методом наращивания. Можно использовать любые подходящие провода, но желательно “силиконовые”. Это позволит им не трескаться при низкой температуре, если вы вдруг захотите запечатлеть на видео новогодний салют зимой.
Настроить и “обучить” квадрокоптер с помощью ПО
Итак мы собрали квадрокоптер с камерой своими руками, осталось обучить нашу машину правильно вести себя в полете. Для этого нужно ее “обучить”. Как это делается? Очень просто! Нужно загрузить прошивку на плату через usb. Найти эту прошивку можно на специализированном форуме или на нашем сайте. Когда выйдет статья с прошивкой, тут появится кликабельная ссылка на прошивку.
Если вы еще не умеете летать на квадрокоптере и хотите научиться, то специально для вас я напишу статью на эту тему. Ссылка появится здесь. Там я расскажу об особенностях управления квадрокоптером и на каком быстрее всего научиться летать как профессионал.
Что же касается второго этапа, то тут все просто нужно прикрепить камеру, которую вы сочтете подходящей для себя по цене и по качеству. В видео обзорах вы найдете подходящую камеру, если нет, то пишите в чат, что располагается в левом нижнем углу, другие пользователи вам подскажут.
В завершение этой статьи предлагаю вам посмотреть еще одно видео по сборке квадрокоптера с камерой своими руками.
Квадрокоптер представляет собой летающую платформу на радиоуправлении с четырьмя оснащенными пропеллерами. В состав таких аппаратов включается летающая многороторная платформа. В полете квадрокоптер занимает относительно поверхности земли горизонтальное положение, способен зависнуть над выбранным местом, перемещается в стороны, вверх и вниз. Наличие специального дополнительного оборудования позволяет квадрокоптеру осуществлять практически автономные полеты.
Этот прибор оснащен четырьмя роторами, которые осуществляют вращение диагонально в противоположных направлениях. Роторами управляет процессор, который сообщает данные с трех гироскопов, предназначенных для определения и фиксации положения в пространстве во всех трех плоскостях. Благодаря акселерометру удается занять абсолютно горизонтальное положение. Фиксация квадрокоптера на нужной высоте осуществляется благодаря оснащению бародатчиком. Прибор смещается в пространстве за счет того, что изменяется скорость вращения той или иной двойки моторов. Происходит крен квадрокоптера с его дальнейшим перемещением.
Первые приборы
Это направление начало развиваться в 2006 году. Разработчики из Германии Инго Бускер и Хольген Бусс создали квадрокоптер своими руками. Вокруг него собралось огромное сообщество увлеченных людей — RC-моделистов, программистов, конструкторов. В середине 2007 года квадрокоптеры стали парить и вполне устойчиво перемещаться в воздухе. Такие приборы отличаются от радиоуправляемых вертолетов в положительную сторону благодаря гибкости конструкции и дешевизне. Необходимое для квадрокоптера оборудование можно приобрести, а дальше есть огромный простор для творчества. Помимо этого, в случае падения обычно ремонт такого прибора обходится гораздо дешевле, чем радиоуправляемого вертолета.

Как собрать квадрокоптер своими руками: инструкция
Раму для устройства вполне можно сделать самостоятельно. Для этого потребуется не так уж много материалов. Среди них кусок фанеры 150 х 150 мм, квадратный алюминиевый профиль 14 х 14 мм. Лучи можно прикрутить посредством винтов по диагоналям квадрата. Тонкую алюминиевую ленту можно использовать для создания посадочных лыж и держателя для Каждый луч от центра имеет длину 300 мм, а каждая балка — 250 мм. Отверстия для двигателей на концах лучей можно сделать уже после сборки, разметив все по двигателям.
Радиоуправляемый квадрокоптер: список необходимых запчастей
- Аппаратура Turnigy 9x.
- Управляющая плата.
- Аккумулятор для аппаратуры.
- Силовой аккумулятор на сам квадрокоптер.
- Пропеллеры.
- Зарядные устройства.
Сборка квадрокоптера
Сначала требуется установить управляющую плату, и постараться поместить ее максимально близко к центру платформы. То есть тут лучше все заранее вымерять, чтобы потом не получилось каких-то проблем с балансом и прочих моментов. Отверстия сверлятся сквозь установленную ранее фанеру, прямо в концы алюминиевых лучей. Длинные саморезы по металлу используются для того, чтобы прикрутить плату непосредственно к лучам. Говоря о том, как собрать квадрокоптер своими руками, следует отметить, что лучи не стоит сверлить насквозь, так как тут аккумулятор прилегает к ним максимально плотно.
В непосредственной близости с платой требуется установить приемник. Его можно закрепить посредством суперклея. Если назначение каналов у приемника в точности совпадает с таковыми у управляющей платы, то можно сделать для них упрощенное соединение посредством двух трехжильных шлейфов.
Размещение двигателя
Если рассуждать о том, как сделать квадрокоптер своими руками, то необходимо разметить лучи и просверлить отверстия под двигатель. Расстояние от краев до оси вращения во всех случаях должно быть в точности одинаковым. Отверстие, предназначенное для хвоста вала, который торчит из дна двигателя, необходимо сверлить насквозь на всю ширину квадрата, что позволит видеть, не цепляется ли вал за его края.
Разборки с проводкой
На данном этапе пришло время произвести следующие операции. Сначала делается «паук» из четырех регуляторов скорости, а их провода питания необходимо соединить параллельно посредством специальных переходников. Использовать стоит только в одном месте — где осуществляется подключение батареи к «пауку». Все остальное необходимо спаять, а потом затянуть в термоусадку, так как в полете от вибрации могут случиться разные неожиданности. Теперь нужно подключить сигнальные провода драйверов в соответствии с на управляющей плате.
Когда все будет собрано, можно переходить к тестированию и решению возникающих проблем.
Альтернативный вариант
Первое, что стоит сказать тем, кого интересует, как собрать квадрокоптер своими руками: не стоит экономить на деталях. Существует большое число прошивок, вариантов датчиков, готовых контроллеров, но в нашей статье будет описан вариант использования Arduino Mega, прошивки MegaPirate, а также относительно дешевых датчиков.
Детали
Для начала вам потребуется 4 мотора плюс 1 запасной. Пропеллеры тоже стоит взять с запасом, должно быть минимум 2 стандартных и 2 — обратного вращения. 4 регулятора скорости, плюс несколько запасных. В качестве источника питания не стоит брать один суперёмкий аккумулятор, так как он будет только придавать лишний вес устройству. Правильнее всего предпочесть несколько мелких, чтобы менять их по очереди. Рама должна быть максимально прочной и легкой. Вариант, описанный выше, можно назвать вполне подходящим. В качестве мозгов и датчиков устройства можно использовать программируемый микроконтроллер, плата — AllInOne, акселерометр, гироскоп, управляющая арматура, аккумуляторы, зарядное устройство, а также многое другое. Под последним следует понимать необходимое количество болтиков, винтиков, проводочков, стяжек. Вам потребуются также инструменты для работы, такие как паяльник и принадлежности для работы с ним, дрель, а также умелые руки.
Сборка железа и его настройка
Если все, описанное выше, у вас имеется, то вполне можно начинать процессы сверления, паяния и скручивания. Раму можно делать так же, как было описано ранее, а можно проявить фантазию. Но тут важен лишь один момент: следите, чтобы расстояние от центра до концов лучей было абсолютно одинаковым, при этом пропеллеры во время вращения не должны задевать друг друга и центральную часть из фанеры, так как на ней размещаются все датчики, мозги, а также камера, если вы пожелаете. Установку датчиков следует производить на толстый скотч, резину или силикон, чтобы уменьшить вибрацию. В середине или на концах лучей можно закрепить пенопласт, плотный поролон или резиновые маячки, которые возьмут на себя функции шасси в момент приземления.
Датчики и способы их добыть
Наиболее простым из вариантов можно назвать покупку готовой платы с четырьмя основными датчиками: гироскопом, предназначенным для измерения углового ускорения; акселерометром для измерения гравитации и ускорения; барометром, который определяет высоту и удерживает квадрокоптер на ней; магнитометром, который фиксирует направление движения.
На данный момент в продаже можно найти и такие платы, на которых кроме четырех указанных датчиков есть еще и GPS-приемник, активно используемый для автономных полетов.
Сборка мозгов
Чтобы процесс монтажа стал максимально удобным, стоит все разместить на какой-то плате, выполняющей функции прототипа. Распиновка подключения зависит от типа прошивки, актуальной на момент сбора устройства, поэтому в каждом отдельном случае все следует подключать в соответствии с инструкциями.
Настройка прошивки и загрузка
Найти нужную прошивку на данный момент не представляет сложности, поэтому следует скачать подходящий архив и распаковать его. После того как прошивка в Arduino будет успешно загружена, можно осуществлять закачивание программы настройки, а потом замыкать контакт A5 с GND. Когда программа будет запущена, в меню Option следует выбрать COM-порт Arduino, а в меню Action — AC2 Setup. Важно, чтобы настройка квадрокоптера прошла успешно, а для этого вам необходимо четко следовать инструкциям, которые появятся перед вами после нажатия на огромную кнопку. В одном окошке от вас потребуется двигать ручки на пульте до максимальных и минимальных значений, а в другом окне появится просьба убедиться, что прибор стоит ровно, чтобы верно откалибровать датчики.
Дальнейшие работы

Управление квадрокоптером настраивается после калибровки. После того как вы завершите настройку, A5 с GND можно разомкнуть, а потом в меню найти пункт AC2 Sensor, где вы сможете проверить, правильно ли работают датчики, во вкладке Raw Sensor. Каждый поворот платы с датчиками должен отрабатываться максимально четко, то есть как повернули, так стрелка и становится, если она не дотягивает или переходит нужное значение, то у вас проблемы либо с датчиком, либо с коэффициентами в коде.
Нужно проверить и работу приемника. Делается это в соседней вкладке. Если движение уровней правильное, то при отклонении джойстика газа на 2 секунды вниз вправо должен светиться красный светодиод. При медленном движении того же манипулятора вверх в левом столбце должно происходить примерно одинаковое отклонение уровней.
Результат
Когда все прошло проверку, можно крепить пропеллеры, а потом попробовать взлететь. Для этого квадрокоптер стоит разместить подальше от себя, наклонить вниз и вправо левую ручку, а потом медленно добавить газа. Если прибор взлетел, это очень хорошо, а если он трясется, то придется настраивать PID. Это осуществляется в пункте PID Config. Делается это все в каждой ситуации индивидуально, то есть нет какого-то универсального решения. Теперь вам известно, как собрать квадрокоптер своими руками.
Желание иметь собственный квадрокоптер, вполне понятно, ведь сегодня время, когда мир переживает настоящий бум. Стоимость «хорошего» дрона, оборудованного камерой большого разрешения для ведения видеосъемки, «по карману» не всем.
{ ArticleToC: enabled=yes }
Но, выход есть – квадрокоптер своими руками. Пошаговая сборка кажется сложной только на первый взгляд.
Весь этап изготовления своими руками состоит из:
- сборки рамы;
- закупки необходимых запчастей;
- сборки;
- проведению проводки.
- Изготовление рамы
Ее можно сделать своими руками из фанеры размером 150х150 мм или алюминиевого профиля размером 14х14 мм. Винтами прикручивают по диагонали лучи, длина которых равна 300 мм. Отверстия для моторов можно просверлить уже после того, как квадрокоптер будет собран.
Для посадочных «лыж» подойдет тонкая лента из алюминия. Ее можно выбрать и для изготовления держателя аккумуляторной батареи.

Необходимые запчасти
- аккумулятор для дрона – 8 шт.;
- батарея для аппаратуры;
- зарядка – 1;
- пропеллеры на 10 дюймов;
- плата управления (HK multi-rotor control board 2.1);
- аппаратура Turnigy 9x.
Все вместе обойдет вам примерно в 120 долларов. Но, ждать посылку из Гонконга придется около 20 дней. Плюс к этому 5 дней, пока можно получить импорт. К указанной сумме добавить нужно 3-15 баксов за доставку.
Нужно максимально точно по центру платформы разместить плату управления. Отверстия для нее просверливают через лучи и фанеру. Плата к лучам крепится с помощью саморезов по металлу.
С платой рядом приклеивают приемник, применив сумермегаклей. Им же можно клеить к лучам антенну. Если назначение каналов у него и платы совпадают, их допускается трехжильными шлейфами.
Следующий шаг сборки квадрокоптера своими руками – сверление отверстий для мотора. На лучи нужно на одинаковом расстоянии, взятом в «на глаз», нанести отметку. Двигатель подойдет с расстоянием между центрами отверстий равным 19 мм и внутренней обычной резьбой М3.
Для вала мотора, нужно просверлить отверстие. Рекомендуется его делать сквозным и на всю ширину квадрата, чтобы за края подставки не цепляться:
Прикручиваем выводами моторы к платформе, пользуясь винтами М3 длиной не больше 4 мм, поскольку такой размер имеет профиль. Делают это, чтобы не испортить обмотку, не способствовать межвитковому замыканию в случае повреждения лака на проводе.
Проводка
Теперь пришло время перейти к проводке. Из четырех регуляторов скорости нужно спаять «паука», припаяв провода прямо в гнезда переходников.
Используются разъемные соединения в единственном месте – при соединении «паука» с батареей. Все остальные соединения паяют и затягивают в шнур термоусадочный, чтобы во время вибрации провода не выпали.
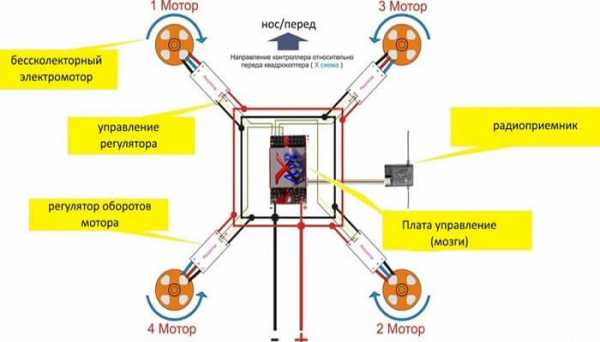
Согласно номерам моторов на плате, подключаем сигнальные провода драйверов. Если используется «плюсовая» схема полета, подключать их нужно к штырям М1-М4 (когда научитесь управлять, прошивку можно изменить).
Схема подключения приводится ниже:
В результате получится такой квадрокоптер, сделанный своими руками, весом один килограмм. Можно проводить тестовый полет.

Но, прежде, необходимо зарядить батарею, подключить ее и передатчик. Теперь время нажать вправо и вниз ручку газа. На плате должен загореться красным цветом СИД. Следующий момент – ручка газа передвинута вперед. Двигатели должны заработать, а квадрокопрет «отправиться» в полет.
Это был простой квадрокоптер своими руками. Если же нужно квадрокоптер собрать самому, да еще с камерой, отличался бы который неплохой производительностью и хорошими летными качествами, есть другой вариант. Сборка зависит от конкретной модели, особенностей электроники и числом элементов конструкции.
Детали для дрона своими руками с камерой
К ним относятся:
- двигатель D2822/14 – 4 шт.;
- регулятор оборота – столько же;
- роторы вращения – левые и правые;
- силовой разветвитель, или разъем на 3,5 мм для подключения регуляторов оборотов.
Не обойтись без платы для регулировки квадрокоптера своими руками, подключаемой к компьютеру через USB — MultiWii ATmega32U4. Чтобы запуск состоялся нужны аккумуляторы Nano Tech 2200 30C – 4 штуки, поскольку при использовании одного накопителя время полета будет небольшим.
Для восстановления энергии в них необходима зарядка. Также потребуется для сборки своими руками контроллер, с помощью которого осуществляется регулировка полетом. Для пульта подойдет устройство Turnigy 9x. Улавливать сигналы с его помощью можно на расстоянии 800-900 метров. Передатчик сигнала идет в комплекте с пультом.
Сборка
Как и в первом случае, она начинается с изготовления рамы, для которой взять можно пластиковые трубы. Поскольку вес их небольшой, квадрокоптер будет мобильным, а развиваемая им скорость высокой. К тому же, такой каркас легко починить в случае «аварии».
К углам прямоугольного каркаса крепятся роторы. Конструкцию необходимо оснастить «ногами», к которым прикрепить камеру.
Силиконовые провода помогут подсоединить двигатели к каждому пропеллеру. Аккумулятор с электроникой неплохо закрепить на платформе, установленной в центре рамы. Прежде, чем приступить к монтажу электронной начинки, следует скачать схему подключения, найти которую несложно на форумах. Если нужно, ДУ можно перепрошить с учетом последних обновлений. Там же, на форумах, рассказывают, как перепрошить пульт.

Собрать квадрокоптер своими руками по силам не каждому, поскольку он требует инженерных навыков. Но, если имеется инструкция и схема, процесс по созданию летающего девайся упрощается.
Пошаговая сборка
Люди, желающие собрать своими руками квадрокоптер, стремятся сэкономить, что вполне понятно. Но причина эта не единственная: многих вопрос интересует потому, что их хобби по управлению беспилотником переросло в желание участвовать в гонках и по возможности стать в них победителем. А для этого необходима доработка конструкции.
Сборка из комплекта
Обзаводясь соответствующим комплектом, можно значительно упростить процесс сборки своими руками ЛА.
Стоит он дешевле готового квадрокоптера в разы, поскольку заниматься сборкой, прошивкой, калибровкой и точной настройкой будет пользователь. Основным достоинством комплектов является отсутствие необходимости подбирать чипы, мощность двигателей, вес корпуса.
О сбалансированности, влияющей на поведение квадрокоптера в полете, тоже не стоит беспокоиться – всеми необходимыми параметрами, в том числе запланированной скоростью и временем нахождения в полете он обладать будет.
Комплекты позволяют собирать разборные и монолитные дроны своими руками. Тут решать пилоту, какую он желает иметь конструкцию. Разборными интересуются те, кто предпочитает модели габаритные, но и одновременно легко переносимые.
Но, для заметки:
такие модели не отличаются привлекательным дизайном, поскольку внешнего корпуса, выполняющего декоративную и защитную функцию, в комплекте нет.
Как собрать подобную конструкцию своими руками, подробно описано в прилагаемой инструкции.
Как правило, начинается все с установки на пластиковый, карбоновый или металлический экзоскелет моторов. Затем размещаются PIN-кабели, регулирующие мощность моторов. Позже крепят на корпус приемник сигналов и управляющий модуль – мозговой центр.
На завершающей стадии устанавливают светодиоды, фиксаторы, аккумуляторы.
Сборка на этом заканчивается, но начинается самое интересное – прошивка, калибровка устройства и тонкая настройка, занимающая от 30 минут до 3 часов (в зависимости от производителя входящих в комплект деталей). К этому моменту аккумулятор должен быть полностью заряженным.
Сборка квадрокоптера из подручных материалов
Хотя она и популярна среди любителей «полетать» на беспилотниках, стоит признаться, что получить полноценный коптер она не позволяет. Покупать детали придется однозначно, только брать не весь комплект, а самые необходимые: винты, двигатели, аккумулятор, управляющую плату и приемник, управляющую аппаратуру, без которой невозможно управлять устройством.
Чтобы комплектующие в воздухе не развалились, их необходимо закрепить на легком, но прочном каркасе. Для изготовления такого подойти может все: палочки от мороженного, пластиковые бутылки и крышки.
Создавая корпус, нельзя забывать об устойчивости конструкции, собранной своими руками, равновесии, полетных качествах, легкости.
Если знания позволяют, схему можно придумать свою, если нет – найти в Интернет.
Первая сборка, как правило, лишь начало. В дальнейшем она будет многократно дорабатываться.

Есть одна хитрость, помогающая избежать сложных расчетов по балансировке – нужно выбрать конкретную модель, а под нее уже заказывать из базового списка комплектующие.
Главное, указывать правильно детали. К примеру, обязательно должно быть в списке по два мотора левого и правого вращения и соответствующие им винты. Иначе функционировать устройство не будет.
Если есть возможность, стоит заказать деталей больше – на случай замены бракованных (такое бывает). В отличие от продающихся наборов, своими руками (голыми) не получится собрать квадрокоптер.
Потребуются:
- клеевой пистолет;
- отвертка;
- паяльник;
- двухсторонний скотч;
- изолента.
Когда рабочая модель будет готова, настанет время модернизации, в результате которой у квадрокоптера могут появиться светодиоды, антенна, пищалки (биперы) и др., увеличивающие функциональность.
Видео: Квадрокоптер своими руками
Квадрик может висеть в одном месте и вести фото и видеосъемку, именно по этому, многие фотографы идут в ногу с прогрессом и покупают квадрокоптеры для видео съемки.
Квадрокоптеры ворвались в нашу жизнь вместе с техническим прогрессом. Сегодня заказать электронику для квадрокоптера из китая стоит очень дешево. Собрать раму квадрокоптера своими руками из подручных материалов и вовсе не сложно. Научиться управлять можно с помощью авиасимуляторов. Так что главное – это наличие желания сделать квадрокоптер своими руками.
Электронику для квадрокоптера лучше всего купить готовую.
Детали самодельного квадрокоптера
Двигатели для квадрокоптера, 4 шт — D2822/14 1450kv
Конечно, дополнительная покупка мелкого квадрокоптера немного накладна, но, летая на таком вы научитесь управлять и сможете летать на большом квадрокоптере с камерой без падений! А мелкую игрушку всегда можно будет подарить ребенку.
Ну и на последок, небольшое видео полета на квадрокоптере, запись с камеры.
В этой статье мы рассмтрели основные прнципы изготовления самодельных квадрокоптеров. Если вы хотите узнать больше — смотрите раздел
iskra комментирует:
как сделать квадракоптер чтобы он летал в радиусе 500 метров с камерой реального времени которая выводит изображение на экран
chelovek комментирует:
Ребят помогите!
хочу собрать квардрик на платформе ардуино мега с использованием вот этох компонентов:
Как сделать Дрон своими руками
Мини дрон — квадрокоптер на дистанционном управлении можно очень просто сделать дома. Использовать его можно для игр и как макет для изучения работы дрона. Конструкция содержит минимальное количество деталей, а на постройку уйдет 15 минут времени или чуть более.Наша простая модель не имеет ни регулировку скорости вращения двигателей, ни изменения направления полета. Она не умеет практически ничего, кроме того как подниматься в воздух вверх и опускаться по нажатию кнопки. Но если вы хотите, то вы можете в дальнейшем собрать более серьезный вариант и доработать всеми возможностями какими хотите.
Понадобится для сборки Дрона
А также: палочки от мороженного, пистолет с горячим клеем, паяльник с припоем и флюсом.
Подробнее о деталях для сборки квадрокоптера
Пульт с приемником для дистанционного управления можно позаимствовать из игрушки, к примеру из сломанной машинки или купить — Али Экспресс. Главным условием должно быть то, чтобы вся электроника исправно работала от напряжения 3,7 В.
Аккумуляторная батарея 3,7 В взята от старого мобильного телефона, ее так же можно приобрести — Али Экспресс. Там можно выбрать еще гораздо меньшие варианты. Мини двигатели для летающих моделей можно купить — Али Экспресс.
Мини двигатели для летающих моделей можно купить — Али Экспресс.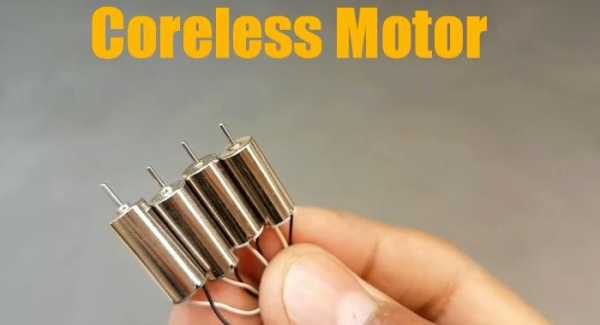 Пропеллеры так же придется приобрести — Али Экспресс. Они должны подходить к двигателям. Так что лучше их взять вообще комплектом — тут на Али.
Пропеллеры так же придется приобрести — Али Экспресс. Они должны подходить к двигателям. Так что лучше их взять вообще комплектом — тут на Али.
Изготовление Дрона — квадрокоптера
Итак, первым делом соберем такую решетку из четырех палочек для мороженного. Фиксируем все горячий клей. Это будет основная рама нашего мини квадрокоптера.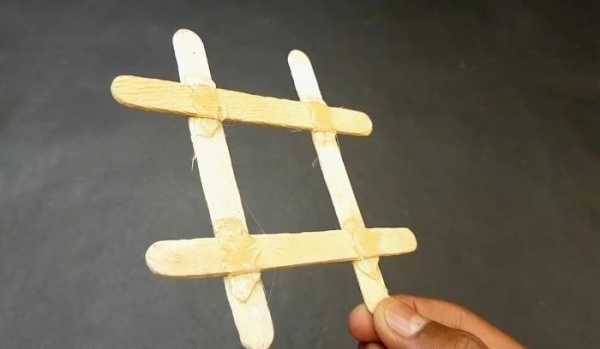 Аккумулятор приклеиваем таким же способом к раме.
Аккумулятор приклеиваем таким же способом к раме.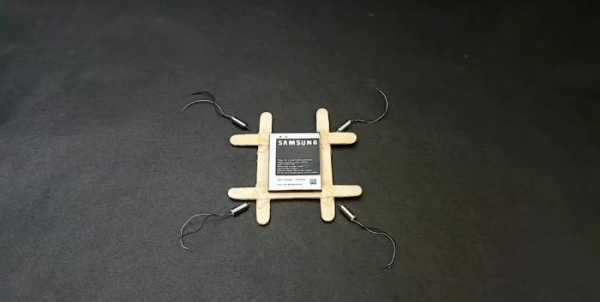 Приклеиваем четыре двигателя с пропеллерами в углы решетки.
Приклеиваем четыре двигателя с пропеллерами в углы решетки. Теперь нужно сделать ножки, на которых будет стоять дрон. Разрежем две палочки от мороженного пополам.
Теперь нужно сделать ножки, на которых будет стоять дрон. Разрежем две палочки от мороженного пополам.
Прикрепим к основанию.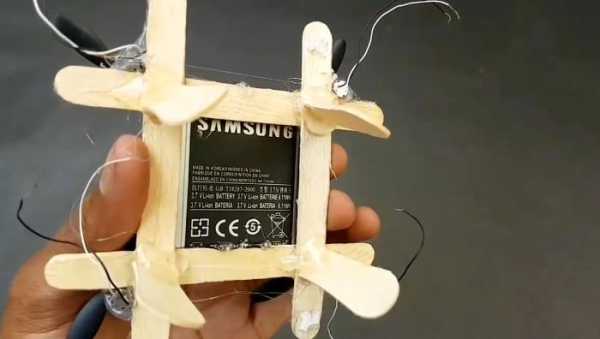 Добавляем приемную плату ДУ. Вывода всех двигателей соединим параллельно.
Добавляем приемную плату ДУ. Вывода всех двигателей соединим параллельно.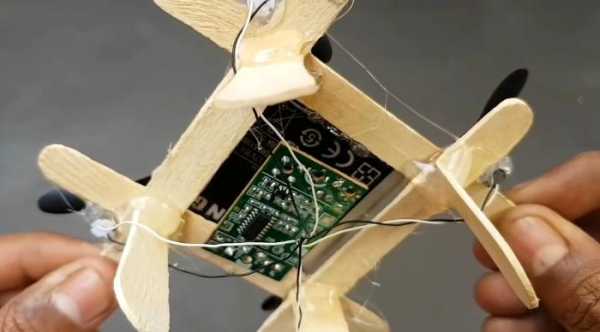 Подключаем провода двигателей к выходу платы ДУ.
Подключаем провода двигателей к выходу платы ДУ.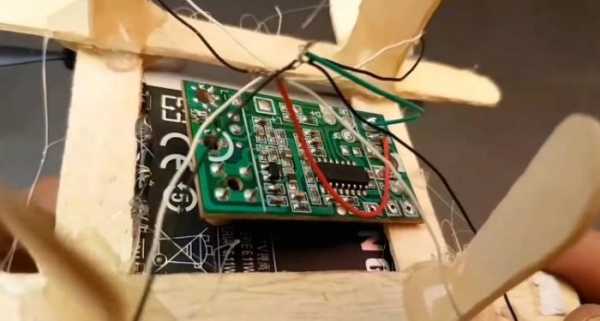 Подключаемся к аккумуляторной батареи.
Подключаемся к аккумуляторной батареи.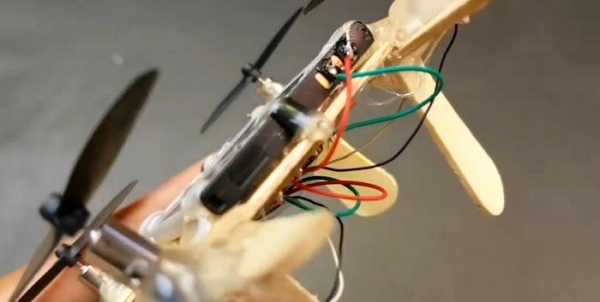 Проверка. Удерживаем дрон от подъема и нажимаем на кнопку пульта ДУ. Если пропеллеры всех четырех двигателей закрутились — все работает исправно.
Проверка. Удерживаем дрон от подъема и нажимаем на кнопку пульта ДУ. Если пропеллеры всех четырех двигателей закрутились — все работает исправно.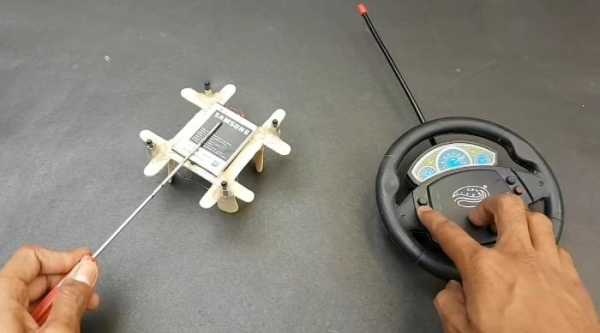 Выходим на открытую местность, ставим наш квадрокоптер и проверяем работу. Дрон должен взлететь в верх без особых проблем.
Выходим на открытую местность, ставим наш квадрокоптер и проверяем работу. Дрон должен взлететь в верх без особых проблем. Если пропеллеры закрутились, а конструкция не взлетела, проверьте уровень заряда аккумулятора. Если все в норме, нужно облегчить конструкцию. В принципе, мощности таких четырех мотором должно хватить с запасом.Во время постройки рекомендую как можно больше экономить общий вес, чтобы дрон был максимально легок. Так что лейте меньше клея, отрезайте максимально короткие провода и т.п.
Если пропеллеры закрутились, а конструкция не взлетела, проверьте уровень заряда аккумулятора. Если все в норме, нужно облегчить конструкцию. В принципе, мощности таких четырех мотором должно хватить с запасом.Во время постройки рекомендую как можно больше экономить общий вес, чтобы дрон был максимально легок. Так что лейте меньше клея, отрезайте максимально короткие провода и т.п.
Смотрите видео
Более подробную инструкцию по сборке игрушки смотрите в видео.
sdelaysam-svoimirukami.ru
Дрон своими руками — АвиаДрон
Как построить дрон? Как сделать квадрокоптер своими руками? Часть 1
Ну что друзья хватит читать про дроны и пускать слюни на красивые картинки и потрясное видео снятое дорогущими коптерами. Мы с вами тоже кое что можем, даже если не заработали на летающих монстров. Давайте построим себе продвинутый и маневренный, многофункциональный квадрокоптер. Для этого не заморачиваясь на суперсложности возьмем и соберем авиа дрон из готового китайского набора.
Это будет квадрокоптер на раме 450 с полётным контроллером APM (Arducopter). В комплект кита входит:
 рама рама коптера из двух площадок
рама рама коптера из двух площадок- четыре несущих луча для двигателей
- четыре двигателя,
- четыре контроллера управления двигателями,
- комплект пропеллеров,
- GPS контроллер
- GPS антенна
- Полетный контроллер
- Крепеж для сборки
 рама рама коптера из двух площадок
рама рама коптера из двух площадокВ видеоролике вы найдете подробнейшую видео-инструкцию по сборке квадрокоптера и подключению электроники. Советы и рекомендации по выбору источников питания и дополнительного оборудования. Автор подготовил для вас подробное и наглядное пособие по первоначальной прошивке и настройке контроллера управляющего коптером APM.В частности очень подробно описан весь процесс настройки и калибровки APM, от калибровки самого АРМ до настроект пульта управления коптером. В качестве пульта управления автор предлагает взять надежный и проверенный FlySky i6. Видео полностью охватывает весь процесс сборки и настройки квадрокоптера с камерой, своими руками с нуля от распаковки кита до первого полёта!
Для удобства ниже вы найдете все ссылки для покупки КИТа и всех необходимых комплектующих
Основной набор комплектующих для сборки коптера
Скидки от 10.5% до 30% на покупки с Aliexpress!
Продолжение…
450sobratдронкиткоптернедорогорамарукамисвоими
Похожие сообщения
aviadron.ru
Квадрокоптер своими руками из подручных материалов. — Паркфлаер
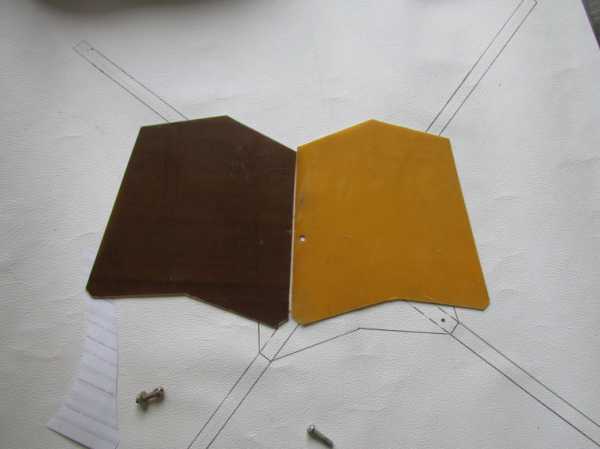
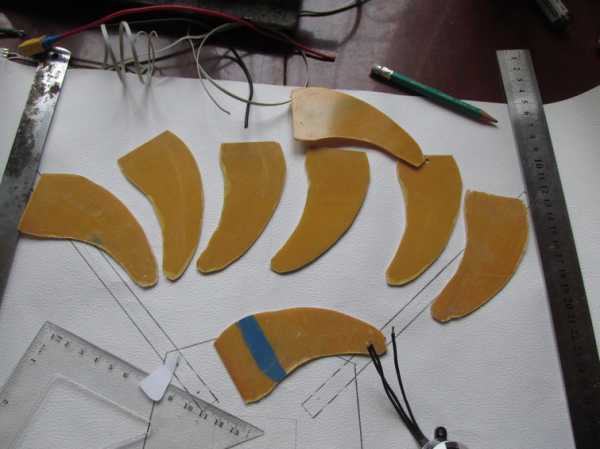
Всем доброго времени суток! Хочу вам рассказать о том, как я строил свой первый квадрокоптер, в каком он сейчас состоянии и мои дальнейшие планы на него.  Сначала, подобрав размер квадра, приступил к зарисовке чертежа на куске обоев. Кстати, размер выбрал 45 — универсальный, так как это мой первый дрон, и в каком направлении буду развиваться пока не знаю.
Сначала, подобрав размер квадра, приступил к зарисовке чертежа на куске обоев. Кстати, размер выбрал 45 — универсальный, так как это мой первый дрон, и в каком направлении буду развиваться пока не знаю.
Собрав дома весь стеклотекстолит, приступил к выпиливанию двух одинаковых основ, между которыми будут зажаты лучи.
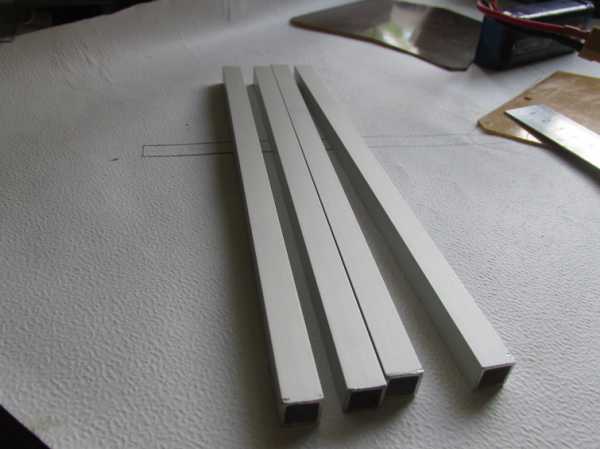
 Материалом для изготовления лучей послужил алюминиевий квадратный профиль 10*10мм
Материалом для изготовления лучей послужил алюминиевий квадратный профиль 10*10мм
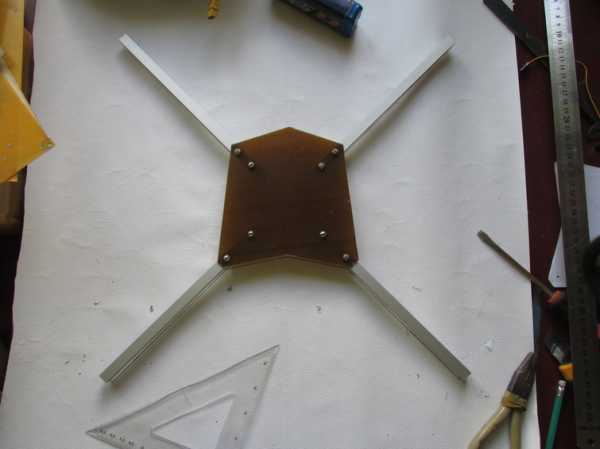
 Предварительная версия…
Предварительная версия… Крепил лучи между основами с помощью винтов и гаек, ничего другого не придумал)
Крепил лучи между основами с помощью винтов и гаек, ничего другого не придумал)
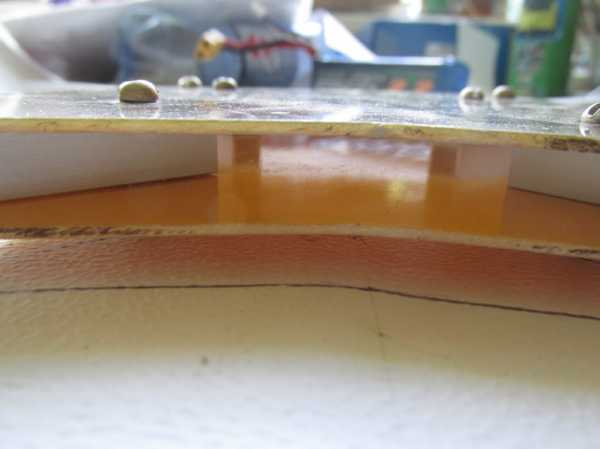 Идём далее…Ноги, шасси делал также из стеклотекстолита. Нарисовав эскиз, приступил к нарезке заготовок
Идём далее…Ноги, шасси делал также из стеклотекстолита. Нарисовав эскиз, приступил к нарезке заготовок
 После чего приступил к мучению шуруповёрта
После чего приступил к мучению шуруповёрта Несмотря ни на что, дрон всё-таки встал на свои ноги)
Несмотря ни на что, дрон всё-таки встал на свои ноги)
 А теперь — взвешивание. Вес рамы, без какого-либо оборудования, составил 263 грамма. Я думаю что это достаточно приемлемый вес, а что думаете вы?
А теперь — взвешивание. Вес рамы, без какого-либо оборудования, составил 263 грамма. Я думаю что это достаточно приемлемый вес, а что думаете вы?
Теперь, когда рама собрана, можно приступить к установке комплектующих.Моторы и регули я выбрал эти:  EMAX XA2212 820KV 980KV 1400KV Motor With Simonk 20A ESC Товар http://www.parkflyer.ru/ru/product/1669970/
EMAX XA2212 820KV 980KV 1400KV Motor With Simonk 20A ESC Товар http://www.parkflyer.ru/ru/product/1669970/
Мозг, всем известный cc3d CC3D Flight Controller Товар http://www.parkflyer.ru/ru/product/1531419/
Батарея: Аккумулятор литий-полимерный ZIPPY Flightmax 3000mAh 3S1P 20C Товар http://www.parkflyer.ru/ru/product/8851/
Моторы со штатными крестиками крепил к лучам на болты и гайки 

 Моторы установлены. Регуляторы примотал на изоленту, радиаторами к лучам.
Моторы установлены. Регуляторы примотал на изоленту, радиаторами к лучам.

 Затем плату распределения питания разместил между пластинами стеклотекстолита
Затем плату распределения питания разместил между пластинами стеклотекстолита
Припаял все нужные провода (регуляторов, габаритных огней). Перфекционистам не смотреть))) Проверил работоспособность… Установив плату распределения питания, приступил к монтажу мозгов. Банально прилепил их на 2-х сторонний скотч. Также поступил с приемником Крепление батареи осуществляется благодаря липучкам на нижней основе квадра. Вот и всё! Полётный вес квадрокоптера — 993 грамма. Прошив полётный контроллер, пошёл на улицу на первые испытания.
Вот и всё! Полётный вес квадрокоптера — 993 грамма. Прошив полётный контроллер, пошёл на улицу на первые испытания.
Видео полётов смотрите с 2.50 минуты
Квадрокоптер был построен в конце лета 2016, сейчас начало 2017г. За этот период квадрокоптер побывал в небе достаточное количество времени. В данный момент коптер цел, не было ни одного краша, я его немножко модернизировал, для установки камеры на его борт. В дальнейшем хочу на нём научится летать по fpv. Сейчас потихоньку начинаю собирать Fpv систему, видеопередатчик, приёмник уже заказал))
Спасибо всем кто читал выше изложенное, если есть вопросы, советы, пожелания — пишите в комментариях. Ниже представлены фотографии сделанные камерой, установленной на квадрокоптере, ну и сам коптер.
С Ув. Алексей








15.01.17




www.parkflyer.ru
Квадрокоптер своими руками

Первый квадрокоптер, как известно, появился в 2006 году. Собрали дрон германские разработчики Бускер и Бусс, причем сделали это сами. И началось: многие инженеры по всему миру загорелись идеей создания собственных моделей квадрокоптера. Есть такие умельцы и сегодня. Хотите собрать свой квадрокоптер и вы. А иначе стали бы читать сейчас этот материал?
Рекомендуем почитать: из чего состоит квадрокоптер
С чего же начать чтоб сделать квадрокоптер своими руками?
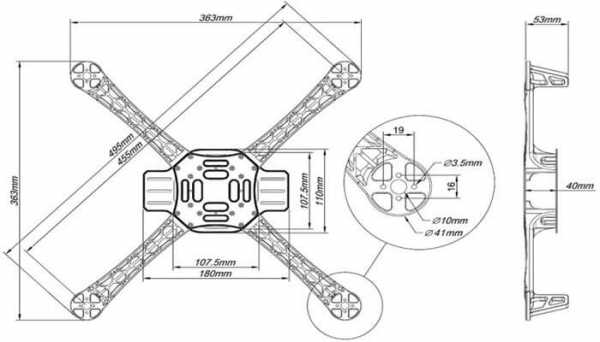
1. Рама. Ее можно сделать без особого труда из пластиковых труб небольшого диаметра, используемых в прокладывании канализационных и иных коммуникаций. Можно изготовить раму из куска фанеры. Понадобится квадрат 110 на 110 мм. Кроме того, потребуется алюминиевый профиль (квадратный). Лучи (длиной по 495 мм) прикрепляются винтами по обеим диагоналям получившегося квадрата. Возможна покупка готовой рамы (рис. снизу).

Из алюминия невысокого профиля можно сделать посадочные «лыжи» коптера. Из него же можно соорудить держатель для аккумулятора.
2. Далее потребуются аппаратура, допустим Turnigy 9XR, управляющая плата и аккумулятор для аппаратуры. Плюсом к тому необходимо приобрести силовой Li — Po аккумулятор (для самого квадрокоптера), пропеллеры, устройство для подзарядки аккумуляторов.

3. Первым делом устанавливается управляющая плата – в центральную часть платформы из получившегося куска фанеры или карбона. Делается это в пазы, непосредственно просверленные в алюминиевой основе через фанеру.
4. Рядом с платой устанавливается приемник (можете сделать это при помощи суперклея). Далее сверлятся отверстия для крепления двигателя. При этом нужно учитывать, чтобы расстояние от края до оси во всех четырех случаях было равным.

5. Затем необходимо сделать «паука» из проводов – от регуляторов скорости. Проводку требуется соединить параллельно с помощью соответствующих переходников. Разъемы при этом можно использовать в том месте, в котором подключается аккумулятор к «пауку».
6. Все требуется спаять, сделать термоусадку, подключить провода (сигнальные). Для начинающих это будет большой проблемой.
7. Можно тестировать получившийся квадрокоптер.Умельцы, которым уже доводилось успешно собирать квадрокоптеры, советуют не экономить на комплектующих. Особенно важным это замечание является сейчас, когда на рынке представлено немало различных микроприборов, в том числе контроллеров и датчиков. Каждый может использоваться при собственноручном производстве дрона, но не каждый может оправдать ожидания разработчика.
Самый простой вариант – приобрести готовую плату с уже установленными датчиками (гироскопом, акселерометром, барометром, магнитометром).
Для чего они нужны?
Гироскоп необходим для контроля углового ускорения, акселерометр замеряет гравитацию, барометр отвечает за набранную высоту, а магнитометр – за направление движения. Сегодня на рынке представлены платы, в которых есть также и GPS-принимающие.
Советы
Перед сборкой квадрокоптера своими руками советуем ознакомиться с советами профессионалов (тех, кто не раз делал дроны сам), ведь для начинающих это будет не так уж и просто:
- Первый «дрон» не должен быть с камерой для фото- или видеосъемки, он – ваша первая работа, задача которой – взлететь, уверенно держаться в создухе и не сломаться при первом же полете;
- Не гонитесь за масштабами. Лучше построить менее крупный и громоздкий, но рабочий квадрокоптер;
- Старайтесь использовать минимум соединений и дополнительных элементов. Множество датчиков и контроллеров оправдано далеко не во всех случаях,
- Если вы все же решились сделать квадрокоптер своими руками с камерой, то знайте, что для высокого качества картинки потребуется основание более крупных размеров. «Усадить» её на устройство намного сложнее, да и в целом конструкция с ним становится менее устойчивой и крепкой.
Если у вас нет времени на сборку или просто терпения, советуем почитать как сэкономить и где выгоднее купить квадрокоптер.
Будем благодарны Вам, если поделитесь с друзьями:
mykvadrocopter.ru
Гоночный FPV-дрон своими руками (часть 1) — сборка / Хабр
Сегодня популярность гонок на дронах стремительно растёт. Любительские полетушки перерастают в серьёзные международные соревнования, а количество людей, вовлечённых в это хобби, растёт в прогрессии. Я сам недавно собрал FPV-квадрокоптер 180-го размера (расстояние в мм между осями моторов по диагонали) и спешу поделиться этим опытом.

Полностью процесс сборки и настройки я описал тут и тут, а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке.
На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них — наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер — это такой промежуточный формат, который «ни нашим, ни вашим». Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. «Промежуточность» 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой — то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. «В народе» на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Для своего квадрика моторы я взял — RCX h3205 2633KV. Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX — вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое.
С остальными комплектующими действовал по принципу «больше челленджа»:
- Рама RC180 V2. Недорогая (брендовые аналоги в 2-3 раза дороже), лёгкая, с хорошей компановкой и нижней пластиной 3мм. К сожалению, отдельно запчастей к ней не купить, но, учитывая цену всей рамы, вполне можно купить 1-2 комплекта на запчасти.
- Приёмник FrSky D4R-II. Поначалу хотелось попробовать FrSky X4R-SB, но в этом случае пришлось бы менять модуль на передатчике, а этого делать совсем не хотелось. Забегая вперёд скажу, что разумнее брать версию приёмника без припаянных разъёмов. У себя я всё равно их отпаял.
- Регуляторы FVT LittleBee 20A — недорогие и проверенные, но сейчас уже устаревшие. Когда я их покупал только-только появились в продаже FVT LittleBee 20A PRO на чипе Silabs F396 (та версия, что у меня использует чип Silabs F330), а на момент написания статьи уже принимались предзаказы на FVT LittleBee 20A-S, заточенные под BLHeli_S. Здесь можно почитать о технических стороне регуляторов LittleBee 20A.
- Видеопередатчик Foxeer FX799T — компактный, популярный и с микрофоном.
- Камера Sony Super HAD CCD 600TVL (IR Block, NTSC, объектив 2.8). Можно было и Foxeer XAT600M, но мне нужна без корпуса.
- Держатель камеры Diatone.
- Антенна-«клевер» BeeRotor и кабель-удлинитель.
- MICRO MinimOSD.
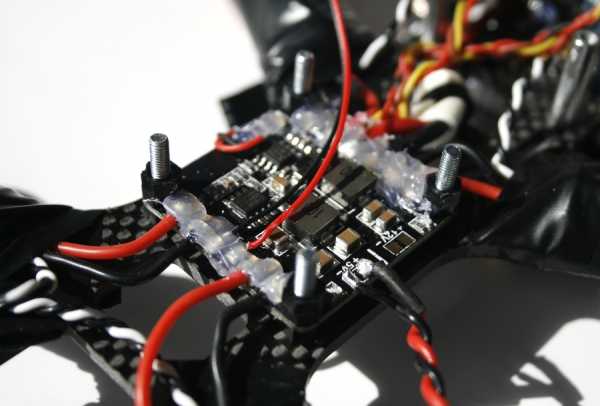
- В комплекте с рамой уже есть плата распределения питания, но я не хочу её использовать. Поэтому заказал Matek Mini Power Hub, она намного удобнее. Кстати, при использовании батарей 3S, эта PBD издаёт громкий свист и это никак не лечится.
- Несколько батарей Turnigy nano-tech 1300mAh 4S 45~90C.
- Подсветка с пищалкой ZG 12Bit WS2812B LED Board. Позднее выяснилось, что пищалка либо не работает, либо есть какие-то неизвестные (никакой документации не прилагалось) нюансы в подключении. В итоге поставил другую.
- Несколько комплектов пропеллеров DYS 3-blade 4040 Bullnose.
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. В недорогие наборы для сборки часто включают контроллер CC3D, так сейчас это, пожалуй, самый дешёвый ПК. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и «пищалка». Его преемник CC3D Revolution — это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€.
Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€.
Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.)
Отдельно отмечу модную ныне тенденцию объединять несколько плат в одну. Чаще всего ПК и OSD или ПК и PDB Я не поддерживаю данную идею за парой исключений. Мне не хочется менять весь полётный контроллер из-за сгоревшей OSD. К тому же, как показывает практика, иногда такое объединение приносит проблемы.
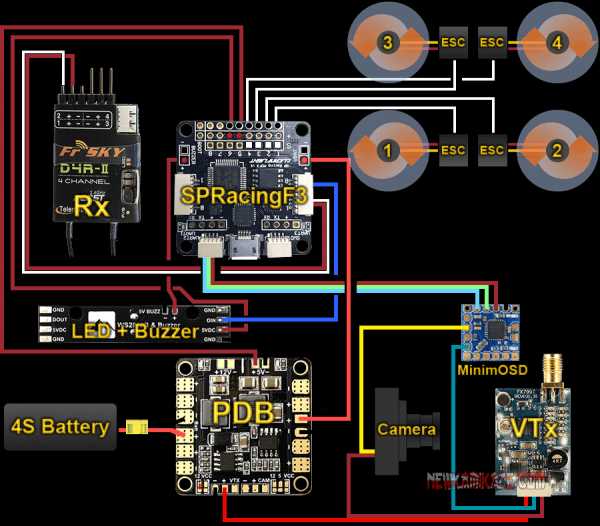
Схема проводки
Понятное дело, что все компоненты, которым нужно питание 5В или 12В, будут получать его от BEC`ов платы распределения питания. Камеру теоретически можно было запитать напрямую от 4S-батареи, благо входное напряжение это позволяет, но ни в коем случае делать этого не стоит. Во-первых, все камеры очень восприимчивы к шумам в цепи от регуляторов, что выразится в помехах на картинке. Во-вторых, регуляторы с активным торможением (такие, как мои LittleBee), при активизации этого торможения, дают в бортовую сеть очень серьёзный импульс, что может сжечь камеру. Причём, наличие импульса напрямую зависит от износа батареи. У новых его нет, а у старых — есть. Вот познавательное видео на тему помех от регуляторов и чем их фильтровать. Так что камеру лучше питать либо от BEC`а, либо от видеопередатчика.
Также, ради улучшения качества картинки, рекомендуется пустить с камеры на OSD не только сигнальный провод, но и «землю». Если скрутить эти провода в «косичку», то «земля» действует, как экран для сигнального провода. Правда в данном случае я этого не делал.
Коли уж зашла речь о «земле», то часто спорят о том, надо ли подключать «землю» от регуляторов к ПК или достаточно одного сигнального провода. На обычном гоночном квадрокоптере однозначно надо подключать. Её отсутствие может привести к срывам синхронизации (подтверждение).
Конечная схема проводки получилась простой и лаконичной, но с парой нюансов:
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.
Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
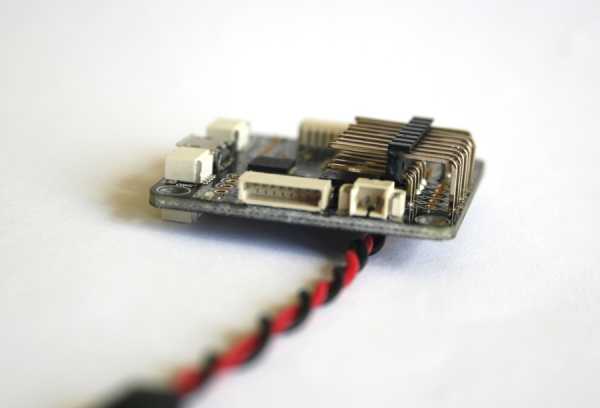
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч + одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе — КЗ.

Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение).
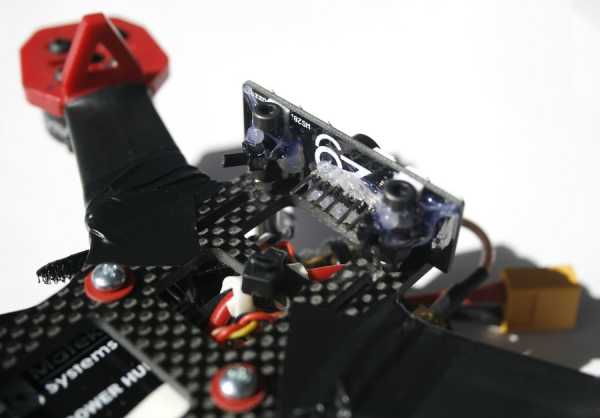
Камера не помещалась по ширине между боковых пластин рамы. Немного обработал края её платы надфилем (скорее сточил шероховатости) и она встала без проблем. Но сложности на этом не кончились. Мне очень понравилось качество держателя для камеры от Diatone, но камера с ним не помещалась в раму по высоте (примерно на 8-10мм). Сначала я приколхозил держатель на наружной (верхней) стороне пластины через неопреновый демпфер, но конструкция получилась ненадёжной. Позже пришла идея максимально простого и надёжного крепления. Я взял только хомут от Diatone`овского крепления и одел его на отрезок прута с резьбой М3. Чтобы камера не сместилась вбок, я зафиксировал хомут нейлоновыми муфтами.

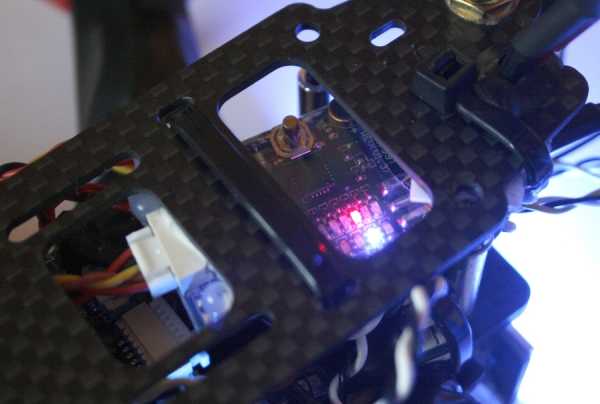
Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками. Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.
Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.
Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.

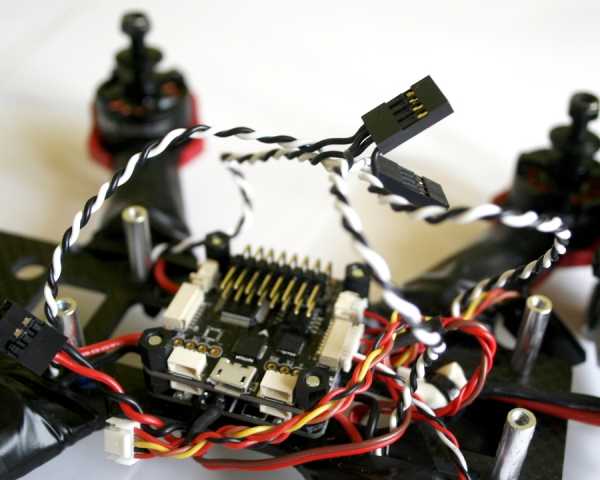
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.
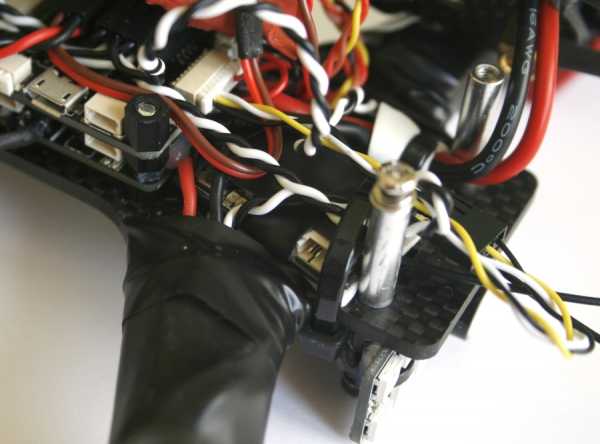
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.
Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.
Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель.
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.
Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.

Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть здесь. Масса квадрокопрера без батареи составляет 330г, с батареей — 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.
habr.com
Основная терминология из мира дронов
Вступительное слово
Сегодня мы начинаем публиковать на нашем сайте совершенно новый и достаточно большой материал, на подготовку которого у нас ушла масса времени и сил. Это серия статей и заметок, объединенных общей тематикой — Как собрать и построить собственный дрон своими руками? Мы постараемся описать весь этот процесс максимально подробно и снабдить его всеми необходимыми дополнениями.
Материал действительно объемный и вы увидите это после того, как мы завершим публикацию. Чтобы вам было проще воспринимать его и легче ориентироваться, мы решили разбить его на несколько отдельных тематических публикаций. Все они будут иметь перекрестные ссылки и будут находиться в одном разделе на сайте, чтобы облегчить процесс навигации.
Почему наш материал на тему сборки собственного дрона получился настолько объемным? Всё дело в том, что мы не хотели упустить ничего важного и поэтому описали все возможные аспекты процесса сборки и начали с самых азов — понимание основ сборки дронов, основные отличия комплектующих, задачи готовых дронов и так далее. В нашей серии материалов вы найдете всё от А до Я о том, как собрать собственный дрон.
Итак, садитесь поудобнее, приготовьте блокнот для заметок, а мы начинаем.
Важное уточнение
Помните, что собрать дрон своими руками можно только путем значительных временных затрат, особенно если вы новичок. Если ваша задача только в том, чтобы «взлететь» как можно скорее, то, вероятно, есть смысл рассмотреть уже готовые модели от DJI, GoPro и других производителей, которых сегодня в продаже огромное разнообразие.

Как собрать дрон своими руками
Часть 1:Основная терминология из мира дронов
Еще до того как вы начнете сборку собственного дрона, вам необходимо разобраться с массой терминологии. По началу она может показаться запутанной или пугающей, но я вас уверяю, что стоит разобраться один раз и в будущем это серьезно облегчит ваши задачи и даже само понимаение публикуемых нами материалов. Для удобства мы разбили все термины на несколько основных категорий.
Основные
Дрон: Синоним для терминов «квадрокоптер», «коптер» или английского «UAV». Дроном можно назвать любой летательный аппарат, управляемый пилотом удаленно.
DIY: Сокращение для англоязычного «Do-It-Yourself» (Сделай сам). Используется для обозначения процесса самостоятельной сборки дрона из разрозненных частей, изначально не созданных для работы друг с другом.
UAV: Сокращение для английского «unmanned aerial vehicle» (беспилотный летательный аппарат).
Механическая часть
Размер: Для того, чтобы обозначит размер готового дрона, используются, как правило, миллиметры. Размером называют расстояние от центральной оси одного мотора до центральной оси другого мотора. Размер также позволяет разделить дроны на классы (мини, микро и так далее).
CG: Сокращение для Center of Gravity (центр тяжести). Центральная точка всей конструкции, вокруг которой равномерно распределены грузы и нагрузки.
Уплотнители: Небольшие резиновые или прорезиненные элементы, которые используются в различных узлах конструкции для уменьшения вибрации и шума при полете.
Рама: У дрона эта запчасть является полным аналогом человеческого скелета — именно на ней держатся основные элементы конструкции, именно она скрепляет их все и позволяет дрону полноценно работать.
Шасси: Элемент, позволяющий дрону успешно и без повреждений совершать посадку. В самолетах используются колеса в качестве шасси, а для дронов это чаще всего пластиковые, металлические, прорезиненные или перфорированные ножки, стойки и пр.
LED: Светодиодная подсветка или светодиодные фонари, которые позволяют ориентироваться в темноте.
Опоры: Ободы, часто расположенные вокруг вращающихся лопастей и предназначенные для их защиты и предотвращения контакта с внешними элементами и предметами. Также они защищают пилота при взаимодействии с уже работающим дроном.
Оболочка: Это, собственно, сам корпус летательного аппарата. Производится он из различных материалов и имеет самую различную форму в зависимости от функциональности и задач дрона. Также именно оболочка корпуса дрона может влиять на его аэродинамические характеристики.
Сенсоры
Акселерометр: Предназначен для измерения ускорения дрона в открытом пространстве.
Барометр: Измеряет высоту полета дрона в реальном времени. Показатели этого сенсора основываются на давлении воздуха.
Гироскоп: Позволяет определять наклоны дрона в пространстве по осям x, y и z. Отвечает за стабилизацию и маневренность дрона в полете.
GPS: Сокращение от «Global Positioning System» (Глобальная Система Позиционирования). Позволяет спутникам на основе получаемых от дрона данных определять его местоположение в пространстве. Служит для автоматического пилотирования по заданному маршруту или для перелета в конкретную заданную точку.
Типы дронов
RTF: Или «Ready-to-Fly». Модели, полностью готовые к полетам и оснащённые прямо «из коробки» всеми необходимыми комплектующими и аксессуарами.
BNF: «Bind-and-Fly». Также полностью собранный и настроенный аппарат, не оснащенный при этом манипулятором или любым другим контроллером. Каждый пользователь самостоятельно выбирает себе подходящую по функциональности модель.
ATF: «Almost-Ready-to-Fly». Комплект для сборки дрона, который подразумевает выбор кастомных комплектующих. Каждый пользователь комплектует свое устройство запчастями из предложенных готовых и полностью совместимых вариантов.
Гексакоптер: Дрон, оснащенный шестью моторами/роторами. Количество пропеллеров, как правило, соответствует количеству моторов.
Мультиротор: Любой летательный аппарат, использующий несколько роторных моторов.
Октокоптер: Восьмимоторный дрон.
Квадрокоптер: Четырехмоторный/четырехпропеллерный дрон.
Трикоптер: Летательный аппарат на трех моторах/роторах.
Движущая установка
ESC: «Electronic Speed Controller». Отдельный элемент электроники, подключаемый к мотору, контроллеру и аккумулятору и способный регулировать скорость работы роторов, а соответственно регулировать и скорость полета аппарата. Более подробно о таких контроллерах мы расскажем в следующих материалах.
Li-Po: «Lithium Polymer». Литий-полимерные элементы питания, которые чаще всего используются в дронах различных типов. Главные преимущества этого типа аккумуляторов — малый вес при достаточно большой емкости, а также способность выдавать большие показатели тока.
Мотор: Двигатель, который приводит в движение лопасти и пропеллеры дрона. В крупных моделях используются бесщеточные моторы, а в моделях поменьше — щеточные. О разнице и преимуществах этих типов моторов также поговорим в одном из следующих материалов о том, как собрать дрон своими руками.
PCB: Печатная плата, на которой располагается большое количество контроллеров и электронных элементов, обеспечивающих работу аппарата.
Контроллер питания: Отвечает за качественное и сбалансированное питание всех отдельных элементов, подключенных к дрону. Так как от одного аккумулятора приходится запитывать сразу несколько устройств (сам дрон, камера, сенсоры и так далее), то практически всегда есть необходимость в контроллере питания.
Видео
FPV: «First Person View». Модели, поддерживающие видео с видом от первого лица. Как правило, такие дроны используются для стрима видео в реальном времени, а не для записи картинки.
LCD: Дисплей, на котором отображается картинка из объектива или другая информация.
Подвес: Крепление для камеры, главной задачей которого является стабилизация изображения во время полета.
GoPro: Популярный бренд экшн-камер, адаптированных для использования в связке с дронами и совместимых с большинством креплений.
С терминологией более-менее разобрались. Здесь представлена наиболее часто используемая ее часть. В следующих материалах, используя эти термины и понятия, мы расскажем о самом процессе подбора комплектующих, о том, как собрать дрон своими руками и как правильно его настроить.
Продолжение следует.
Коментарии
коментарии
dronesmag.com.ua
Самодельный дрон из того что есть
Как сделать дрон из велосипедного обода за 5 минут
Как видите любой предмет может за считанные минуты превратится во вполне презентабельный и качественный авиа дрон. Все зависит лишь от вашей фантазии. Достаточно лишь подготовить заранее весь мобильный комплект, собрать который тоже не особо сложно.
 Все пластиковые детали, предназначенные для крепления моторов, были напечатаны на 3D-принтере из ABS-пластика. Но с таким же успехом могут быть заменены простыми пластиковыми струбцинами коих в огромном количестве полно в магазинах и настоящему умельцу ничто не помешает изготовить крепеж собственной конструкции.Кроме пластиковых деталей, винтов, гаек и шайб, в комплект дрона входят четыре мотора с пропеллерами (два с правым и два с левым вращением), батареи и электронные модули.
Все пластиковые детали, предназначенные для крепления моторов, были напечатаны на 3D-принтере из ABS-пластика. Но с таким же успехом могут быть заменены простыми пластиковыми струбцинами коих в огромном количестве полно в магазинах и настоящему умельцу ничто не помешает изготовить крепеж собственной конструкции.Кроме пластиковых деталей, винтов, гаек и шайб, в комплект дрона входят четыре мотора с пропеллерами (два с правым и два с левым вращением), батареи и электронные модули.  Подробная спецификация комплектующих с перечнем конкретных изделий, которые этот автор использовал лично, будет позже опубликована на нашем сайте. Отдельные позиции из этого перечня можно заменить на какие-то другие, не забывая о том, что замены могут повлиять на эксплуатационные характеристики комплекта, включая основную грузоподъемность. Комплект, собранный самим автором, вполне свободно поднимает в воздух обычное велосипедное колесо.
Подробная спецификация комплектующих с перечнем конкретных изделий, которые этот автор использовал лично, будет позже опубликована на нашем сайте. Отдельные позиции из этого перечня можно заменить на какие-то другие, не забывая о том, что замены могут повлиять на эксплуатационные характеристики комплекта, включая основную грузоподъемность. Комплект, собранный самим автором, вполне свободно поднимает в воздух обычное велосипедное колесо.
дронКонструкцииСтроить
Похожие сообщения
aviadron.ru
- Tutorial
Полностью процесс сборки и настройки я описал и , а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке.
На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них — наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер — это такой промежуточный формат, который «ни нашим, ни вашим». Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. «Промежуточность» 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой — то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. «В народе» на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Для своего квадрика моторы я взял — RCX H2205 2633KV . Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX — вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое.
С остальными комплектующими действовал по принципу «больше челленджа»:
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. В недорогие наборы для сборки часто включают контроллер CC3D, так сейчас это, пожалуй, самый дешёвый ПК. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и «пищалка». Его преемник CC3D Revolution — это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€.
Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€.
Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.)
Отдельно отмечу модную ныне тенденцию объединять несколько плат в одну. Чаще всего ПК и OSD или ПК и PDB Я не поддерживаю данную идею за парой исключений. Мне не хочется менять весь полётный контроллер из-за сгоревшей OSD. К тому же, как показывает практика, иногда такое объединение приносит проблемы .
Схема проводки
Понятное дело, что все компоненты, которым нужно питание 5В или 12В, будут получать его от BEC`ов платы распределения питания. Камеру теоретически можно было запитать напрямую от 4S-батареи, благо входное напряжение это позволяет, но ни в коем случае делать этого не стоит. Во-первых, все камеры очень восприимчивы к шумам в цепи от регуляторов, что выразится в помехах на картинке. Во-вторых, регуляторы с активным торможением (такие, как мои LittleBee), при активизации этого торможения, дают в бортовую сеть очень серьёзный импульс, что может сжечь камеру. Причём, наличие импульса напрямую зависит от износа батареи. У новых его нет, а у старых — есть. Вот познавательное видео на тему помех от регуляторов и чем их фильтровать. Так что камеру лучше питать либо от BEC`а, либо от видеопередатчика.
Также, ради улучшения качества картинки, рекомендуется пустить с камеры на OSD не только сигнальный провод, но и «землю». Если скрутить эти провода в «косичку», то «земля» действует, как экран для сигнального провода. Правда в данном случае я этого не делал.
Коли уж зашла речь о «земле», то часто спорят о том, надо ли подключать «землю» от регуляторов к ПК или достаточно одного сигнального провода. На обычном гоночном квадрокоптере однозначно надо подключать. Её отсутствие может привести к срывам синхронизации (подтверждение).
Конечная схема проводки получилась простой и лаконичной, но с парой нюансов:
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.
Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток.
Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму. - Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч + одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе — КЗ.
Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение).
Камера не помещалась по ширине между боковых пластин рамы. Немного обработал края её платы надфилем (скорее сточил шероховатости) и она встала без проблем. Но сложности на этом не кончились. Мне очень понравилось качество держателя для камеры от Diatone, но камера с ним не помещалась в раму по высоте (примерно на 8-10мм). Сначала я приколхозил держатель на наружной (верхней) стороне пластины через неопреновый демпфер, но конструкция получилась ненадёжной. Позже пришла идея максимально простого и надёжного крепления. Я взял только хомут от Diatone`овского крепления и одел его на отрезок прута с резьбой М3. Чтобы камера не сместилась вбок, я зафиксировал хомут нейлоновыми муфтами.
Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками. Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.
Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.

Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.
Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.


Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.

С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.

Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.
Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель.
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.

Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.
Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть
Перед тем, как начать делать беспилотник, стоял выбор, какую летательную модель брать за основу: квадракоптер или самолет? Так как с коптерами я в свое время наигрался, знаю их основной минус: чаще всего время полета составляет 10-20 минут. Лично для меня это очень мало, поэтому было решено взять за основу самолет.
В качестве самолета я выбрал Bixler 2, в нем очень много плюсов, а именно:
- Неубиваемость
- Размах крыльев (1.5m)
Теперь осталось дело за автопилотом. В качестве «мозгов» взят Raspberry PI B+ с платой NAVIO, на которой располагаются нужные нам датчики:
- GPSGNSS
- акселерометр, гироскоп, магнитометр
- датчик давления для расчета высоты
- 4-х канальный АЦП
- 16-канальный ШИМ-генератор
- FRAM, энергонезависимая память
- RGB LED
- PPM вход
Возможно многие слышали, а кто-то успел и опробовать ArduPlane. Это open source проект автопилота для коптера/самолета/ровера. К счастью, команда EMLID, которая занималась разработкой платы NAVIO, сделала порт ArduPlane на Raspberry PI. Так что все, что надо, это склонировать репозиторий и скомпилировать все это дело на малинке, после чего закрепить наш автопилот на самолете — и в путь.
Монтируем наш автопилот к самолету:
Тут я и столкнулся с проблемами: места очень мало, пришлось отказаться от стандартной кабины пилота, которая шла вместе с самолетом, и сделать из пустой баклажки от кока-колы новую кабину пилота, покрасив ее в серебристый цвет. Оказалось, что смотрится намного лучше, чем стандартная.
Скажу честно, все получилось не с первого раза. Так как запускать самолет я мог только по выходным и не всегда улыбалась погода, то с момента, когда у меня был готов самолет и до первого успешного запуска, прошло полтора месяца.
Я полетал в режиме стабилизации: если не двигать рычаги на пульте управления, то самолет сам себя выравнивает и летит по прямой. Следующим этапом будет полет по GPS точкам с заранее проложенным маршрутом.
Теперь, возможно, кому-то будет интересна цена вопроса. Итак:
- Bixler 2 — 90$(без пульта, он у меня был)
- Аккумулятор 2600mAh — 50$
- Raspberry Pi B+ (sd card)- 45$
- NAVIO — 149$
В сумме у меня получилось $334 за весь комплект, готовый к полету. Кто-то скажет, что это дорого и, возможно, будет прав. Однако я считаю, что это даром, при том что у меня есть летающий линукс, к которому я могу подключить 3G модем и изменять курс полета везде, где есть покрытие интернета.
Квадрокоптер можно приобрести практически в любом крупном интернет-магазине, или сделать дрон своими руками. Неизвестно, что появилось раньше: массовое производство коптеров или первыми были попытки радиолюбителей создать дрон самостоятельно. Но тот факт, что это увлечение становится популярным среди любителей радиоуправляемых устройств, не может оставить равнодушным ни одного моделиста и коллекционера квадрокоптеров.
Модель квадрокоптера «Сделай Сам»
Многие пользователи дронов задаются вопросом — как собрать квадрокоптер собственными руками. Скорее это желание происходит от стремления получить полный контроль над полетом и управлением процесса съемки.
В самостоятельной сборке коптера есть ряд преимуществ: во-первых
, это возможность создать аппарат с теми параметрами, которые вам нужны. Во-вторых,
такое устройство легче кастомизировать, всегда можно приделать новые детали или заменить, например, аккумулятор и поставить более мощный источник питания. В-третьих
, это может послужить интересным опытом и стать первым шагом к новому увлечению.
 Из отрицательных сторон можно подчеркнуть то, что такая сборка может потребовать много времени на поиск нужных деталей, изучение всей технической части. Тем более никто не сможет дать гарантии, что «первый блин не пойдёт комом». Хотя с другой стороны, сейчас существует большое количество специализированных магазинов для радиотехники, а понять принципы устройства и работы квадрокоптера помогут многочисленные схемы на примере готовых моделей самодельных версий.
Из отрицательных сторон можно подчеркнуть то, что такая сборка может потребовать много времени на поиск нужных деталей, изучение всей технической части. Тем более никто не сможет дать гарантии, что «первый блин не пойдёт комом». Хотя с другой стороны, сейчас существует большое количество специализированных магазинов для радиотехники, а понять принципы устройства и работы квадрокоптера помогут многочисленные схемы на примере готовых моделей самодельных версий.
Также многие прибегают к моделированию дронов из того расчёта, что это может обойтись гораздо дешевле, чем покупка брендового устройства. Но и здесь многое зависит от того, с какими характеристиками аппарат вы хотите получить, и важен ли для вас внешний вид квадра. Тем более частые модификации, которые помогут сделать дрон более функциональным, тоже могут влиться «в копеечку».
Изобретатель Джаспер ван Ленен в 2013 году представил набор для тех, кто хочет собрать дрон самостоятельно. В чемоданчике у него было всё самое необходимое: электроника, моторчики, радиоприёмник, детали корпуса. Все пластмассовые детали были распечатанные на 3
D
принтере.
Купить или сделать?
Решение сделать коптер самим может быть определёно, так называемым, спортивным интересом, а может быть связано и с желанием сэкономить. И в первом, и во втором случае важно взвесить все «за» и «против», а также определить сильные и слабые стороны в самостоятельной сборке.
Время
Как было сказано выше, основным минусом дрона «Сделай Сам» может стать время. Ведь одно дело -заказать готовый к полёту квадр, подождать одну-две недели и использовать его в своё удовольствие. А вот в самостоятельной сборке есть целый ряд нюансов, которые могут повлиять на сроки:
- Приобретение всех необходимых запчастей, которые не всегда могут попасть к вам в руки одновременно.
- Время потребуется и на изучение технической части, чтобы ясно понимать из чего состоит и как работает дрон.
- Сама сборка и настройка полётного контроллера потребует времени и, конечно, терпения.
- Постсборка, которая означает не только тестирование, но работу над ошибками и «переделками», что также занимает много времени и сил.
Опыт
Компенсировать первый пункт во многом сможет наличием опыта в самостоятельной сборке радиоуправляемых устройств. К тому же, если вы собираете дрон при наличии «заводской» модели, то это может стать наглядным пособием для изучения «начинки» квадра. А вот для тех, кто первый раз сталкивается с такой сборкой, есть два варианта:
А) Приобрести самую недорогую модель квадрокоптера, которая не только послужит образцом, но и чьи детали можно позаимствовать для своего коптера;
Б) Обратиться за помощью на форумы и специализированные сайты, где можно почерпнуть всю информацию, а также подробно прочитать о пошаговой сборке коптера с указанием наименований всех необходимых деталей.
Стоимость
Многие решают собрать квадрокоптер из расчёта, что такое устройство обойдётся дешевле покупного. Но здесь следует помнить о некоторых особенностях:
- Конечно, если вы ставите цель собрать квадрик из подручных средств с минимальными затратами, то проблем не возникнет, так как можно приобрести все комплектующие из одного ценового диапазона. Но тут нужно понимать, что создать мощное устройство с высокой грузоподъемностью вам не удастся.
- Если же вы делаете ставку на характеристики квадрокптера, а не на простую возможность взлетать и парить в воздухе несколько минут, то здесь вы вряд ли добьетесь существенной разницы между покупным и самодельным коптером. Хотя, конечно, возможность сохранить 10-20% от стоимости всё же будет.
Самостоятельная сборка квадро-, гекса- или трикоптера — это возможность попробовать себя в роли инженера и механика, позволяющая создать уникальную модель с теми характеристиками, которые для вас являются наиболее актуальными. Но питать надежды, что это более простой и дешёвый путь, чем покупка готового устройства, всё же не стоит.
Детали, процесс сборки, нюансы
Итак, вы решили создать свой первый квадрокоптер. Для начала лучше всего обратиться к опыту «бывалых» конструкторов. Здесь на помощь придут различные форумы, сайты, видео-«лайфхаки».
Любой дрон состоит из двух основных частей — это сам механизм, который запускает его, и каркас, на котором крепится эта «начинка». Для того чтобы коптер полетел нужны:
- Полетный контроллер;
- Батарея;
- Моторы и пропеллеры, которые к ним крепятся;
- Регуляторы скорости;
- Сервопровод для создания поворотного механизма;
- А также различные расходники: шурупы, разъемы, антивибрационная губка, клей, эластичная лента.
Каркас может быть вырезан из фанеры или из прочного пластика, его форма во многом определяет и тип дрона: будет ли это три-, квадро- или гексакоптер. Он представляет собой основную раму, на которую крепится контроллер и аккумулятор, и лучи с моторами, поворотным механизмом и конструкцией для регулятора скорости. Лучше всего, если лучи будут подвижными, особенно в случае, когда вы собираетесь делать большой квадрокоптер, тогда впоследствии не возникнет проблем с транспортировкой.
Создание своего квадрокоптера — это возможность попробовать себя в роли инженера и дизайнера. Коптеру можно придать самую разную форму, используя как готовый каркас, так и самодельный, попробовать оснастить его дополнительными конструкциями, которые будут помогать переносить различные предметы на борту.
Если коптер будет использоваться для аэросъёмки, то следует позаботиться и о наличии подвесов для камеры. От мощности моторов и размеров пропеллеров будет зависеть грузоподъёмность устройства. Этот факт особенно важно учитывать, если речь идёт о тяжёлых цифровых или полупрофессиональных камерах.
Настройка полётного контроллера происходит через ПК, на который предварительно нужно установить специальную программу для MultiWii или Arduino, в зависимости от модели купленного контроллера. И, конечно же, чтобы вы могли управлять и ловить сигнал от вашего коптера нужно будет приобрести радиопередатчик, например, DSM2.

Flone (сокращение от Flying Phone), это дрон с начинкой из смартфона.
Для проекта понадобится:
1. Смартфон на базе Android
2. Контроллеры от Multiwii или Arduino
3. Контроллер DSM2
4. 4 мотора
Шаг 1: Материалы
Материалы можно купить там, где вам удобнее, но я на всякий случай дам ссылки на Hobbyking.
Ну а если лазерный резак для тебя совсем не вариант, то можешь просто распечатать схему на листе формата А3 и по нему вырезать нужные формы из фанеры. Сами файлы в формате DXF находятся
Шаг 3: Что и где крепить
Набросок того, что и где крепится на корпусе.
Шаг 4: Сборка
Склеим усилители ног к самим ногам (схема на фото номер 4). Приклеиваем ноги. Как только клей высох, крепим моторы.
Шаг 5: Крепим полетный контроллер
Какой полетный контроллер вы купите не важно, все они крепятся в одно место — по центру скобы. Что действительно важно — так это анти вибрационная губка, она должна крепится между панелью и контроллером, чтобы приглушать вибрации панели.
Шаг 6: Припаиваем распределитель питания
Распределитель питания можно сделать из любой медной пластины, проделав в ней отверстия, и вручную припаяв провода. Привариваем разъем для батареи и кабелей контроллера скоростей.
Шаг 7: Крепим модуль DSM2
Модуль DSM2, это радиоприемник, на фото — черный блок слева внизу. Это основной канал связи дрона с сигналами из внешнего, наземного мира. На этом этапе вам понадобится радио с частотой 2.4 GHz и четырьмя каналами, чтобы управлять дроном. В будущем для этого будет использоватся смартфон. То есть дрон, внутри которого будет смартфон, будет управляться другим смартфоном.
Шаг 8: Конфигурация полетного контроллера
Полетные контроллеры MultiWii / Arduino конфигурируются через usb кабель, подключенный к ПК (софт для конфигурации MultiWii). Для начала убедитесь в наличии сигнала между ПК и контроллером. Нужно будет настроить магнитометр, акселерометр и гироскопы.
Шаг 9: Подключаем моторы
Подключаем каждый мотор к его контроллеру скорости, однако перед тем как все окончательно спаять, нужно определиться с тем, какой провод контроллера с каким проводом мотора соединить так, чтобы мотор вертелся в нужном нам направлении. Для этого подключите 3 моторных кабеля к контроллеру скорости в произвольном порядке, затем контроллер скорости к полетному контроллеру через 3 контактный разъем, подключите к полетному контроллеру батарею. Включите радиоприемник, запустите мотор и проверьте в корректном ли направлении он вращается. Повторите это с оставшимися тремя моторами, а когда проверка окончена, кабели можно спаять.
Желание иметь собственный квадрокоптер, вполне понятно, ведь сегодня время, когда мир переживает настоящий бум. Стоимость «хорошего» дрона, оборудованного камерой большого разрешения для ведения видеосъемки, «по карману» не всем.
{ ArticleToC: enabled=yes }
Но, выход есть – квадрокоптер своими руками. Пошаговая сборка кажется сложной только на первый взгляд.
Весь этап изготовления своими руками состоит из:
- сборки рамы;
- закупки необходимых запчастей;
- сборки;
- проведению проводки.
- Изготовление рамы
Ее можно сделать своими руками из фанеры размером 150х150 мм или алюминиевого профиля размером 14х14 мм. Винтами прикручивают по диагонали лучи, длина которых равна 300 мм. Отверстия для моторов можно просверлить уже после того, как квадрокоптер будет собран.
Для посадочных «лыж» подойдет тонкая лента из алюминия. Ее можно выбрать и для изготовления держателя аккумуляторной батареи.
Необходимые запчасти
- аккумулятор для дрона – 8 шт.;
- батарея для аппаратуры;
- зарядка – 1;
- пропеллеры на 10 дюймов;
- плата управления (HK multi-rotor control board 2.1);
- аппаратура Turnigy 9x.
Все вместе обойдет вам примерно в 120 долларов. Но, ждать посылку из Гонконга придется около 20 дней. Плюс к этому 5 дней, пока можно получить импорт. К указанной сумме добавить нужно 3-15 баксов за доставку.
Нужно максимально точно по центру платформы разместить плату управления. Отверстия для нее просверливают через лучи и фанеру. Плата к лучам крепится с помощью саморезов по металлу.
С платой рядом приклеивают приемник, применив сумермегаклей. Им же можно клеить к лучам антенну. Если назначение каналов у него и платы совпадают, их допускается трехжильными шлейфами.
Следующий шаг сборки квадрокоптера своими руками – сверление отверстий для мотора. На лучи нужно на одинаковом расстоянии, взятом в «на глаз», нанести отметку. Двигатель подойдет с расстоянием между центрами отверстий равным 19 мм и внутренней обычной резьбой М3.
Для вала мотора, нужно просверлить отверстие. Рекомендуется его делать сквозным и на всю ширину квадрата, чтобы за края подставки не цепляться:
Прикручиваем выводами моторы к платформе, пользуясь винтами М3 длиной не больше 4 мм, поскольку такой размер имеет профиль. Делают это, чтобы не испортить обмотку, не способствовать межвитковому замыканию в случае повреждения лака на проводе.
Проводка
Теперь пришло время перейти к проводке. Из четырех регуляторов скорости нужно спаять «паука», припаяв провода прямо в гнезда переходников.
Используются разъемные соединения в единственном месте – при соединении «паука» с батареей. Все остальные соединения паяют и затягивают в шнур термоусадочный, чтобы во время вибрации провода не выпали.
Согласно номерам моторов на плате, подключаем сигнальные провода драйверов. Если используется «плюсовая» схема полета, подключать их нужно к штырям М1-М4 (когда научитесь управлять, прошивку можно изменить).
Схема подключения приводится ниже:

В результате получится такой квадрокоптер, сделанный своими руками, весом один килограмм. Можно проводить тестовый полет.
Но, прежде, необходимо зарядить батарею, подключить ее и передатчик. Теперь время нажать вправо и вниз ручку газа. На плате должен загореться красным цветом СИД. Следующий момент – ручка газа передвинута вперед. Двигатели должны заработать, а квадрокопрет «отправиться» в полет.
Это был простой квадрокоптер своими руками. Если же нужно квадрокоптер собрать самому, да еще с камерой, отличался бы который неплохой производительностью и хорошими летными качествами, есть другой вариант. Сборка зависит от конкретной модели, особенностей электроники и числом элементов конструкции.
Детали для дрона своими руками с камерой
К ним относятся:
- двигатель D2822/14 – 4 шт.;
- регулятор оборота – столько же;
- роторы вращения – левые и правые;
- силовой разветвитель, или разъем на 3,5 мм для подключения регуляторов оборотов.
Не обойтись без платы для регулировки квадрокоптера своими руками, подключаемой к компьютеру через USB — MultiWii ATmega32U4. Чтобы запуск состоялся нужны аккумуляторы Nano Tech 2200 30C – 4 штуки, поскольку при использовании одного накопителя время полета будет небольшим.
Для восстановления энергии в них необходима зарядка. Также потребуется для сборки своими руками контроллер, с помощью которого осуществляется регулировка полетом. Для пульта подойдет устройство Turnigy 9x. Улавливать сигналы с его помощью можно на расстоянии 800-900 метров. Передатчик сигнала идет в комплекте с пультом.
Сборка
Как и в первом случае, она начинается с изготовления рамы, для которой взять можно пластиковые трубы. Поскольку вес их небольшой, квадрокоптер будет мобильным, а развиваемая им скорость высокой. К тому же, такой каркас легко починить в случае «аварии».
К углам прямоугольного каркаса крепятся роторы. Конструкцию необходимо оснастить «ногами», к которым прикрепить камеру.
Силиконовые провода помогут подсоединить двигатели к каждому пропеллеру. Аккумулятор с электроникой неплохо закрепить на платформе, установленной в центре рамы. Прежде, чем приступить к монтажу электронной начинки, следует скачать схему подключения, найти которую несложно на форумах. Если нужно, ДУ можно перепрошить с учетом последних обновлений. Там же, на форумах, рассказывают, как перепрошить пульт.
Собрать квадрокоптер своими руками по силам не каждому, поскольку он требует инженерных навыков. Но, если имеется инструкция и схема, процесс по созданию летающего девайся упрощается.
Пошаговая сборка
Люди, желающие собрать своими руками квадрокоптер, стремятся сэкономить, что вполне понятно. Но причина эта не единственная: многих вопрос интересует потому, что их хобби по управлению беспилотником переросло в желание участвовать в гонках и по возможности стать в них победителем. А для этого необходима доработка конструкции.
Сборка из комплекта
Обзаводясь соответствующим комплектом, можно значительно упростить процесс сборки своими руками ЛА.
Стоит он дешевле готового квадрокоптера в разы, поскольку заниматься сборкой, прошивкой, калибровкой и точной настройкой будет пользователь. Основным достоинством комплектов является отсутствие необходимости подбирать чипы, мощность двигателей, вес корпуса.
О сбалансированности, влияющей на поведение квадрокоптера в полете, тоже не стоит беспокоиться – всеми необходимыми параметрами, в том числе запланированной скоростью и временем нахождения в полете он обладать будет.
Комплекты позволяют собирать разборные и монолитные дроны своими руками. Тут решать пилоту, какую он желает иметь конструкцию. Разборными интересуются те, кто предпочитает модели габаритные, но и одновременно легко переносимые.
Но, для заметки:
такие модели не отличаются привлекательным дизайном, поскольку внешнего корпуса, выполняющего декоративную и защитную функцию, в комплекте нет.
Как собрать подобную конструкцию своими руками, подробно описано в прилагаемой инструкции.
Как правило, начинается все с установки на пластиковый, карбоновый или металлический экзоскелет моторов. Затем размещаются PIN-кабели, регулирующие мощность моторов. Позже крепят на корпус приемник сигналов и управляющий модуль – мозговой центр.
На завершающей стадии устанавливают светодиоды, фиксаторы, аккумуляторы.
Сборка на этом заканчивается, но начинается самое интересное – прошивка, калибровка устройства и тонкая настройка, занимающая от 30 минут до 3 часов (в зависимости от производителя входящих в комплект деталей). К этому моменту аккумулятор должен быть полностью заряженным.
Сборка квадрокоптера из подручных материалов
Хотя она и популярна среди любителей «полетать» на беспилотниках, стоит признаться, что получить полноценный коптер она не позволяет. Покупать детали придется однозначно, только брать не весь комплект, а самые необходимые: винты, двигатели, аккумулятор, управляющую плату и приемник, управляющую аппаратуру, без которой невозможно управлять устройством.
Чтобы комплектующие в воздухе не развалились, их необходимо закрепить на легком, но прочном каркасе. Для изготовления такого подойти может все: палочки от мороженного, пластиковые бутылки и крышки.
Создавая корпус, нельзя забывать об устойчивости конструкции, собранной своими руками, равновесии, полетных качествах, легкости.
Если знания позволяют, схему можно придумать свою, если нет – найти в Интернет.
Первая сборка, как правило, лишь начало. В дальнейшем она будет многократно дорабатываться.
Есть одна хитрость, помогающая избежать сложных расчетов по балансировке – нужно выбрать конкретную модель, а под нее уже заказывать из базового списка комплектующие.
Главное, указывать правильно детали. К примеру, обязательно должно быть в списке по два мотора левого и правого вращения и соответствующие им винты. Иначе функционировать устройство не будет.
Если есть возможность, стоит заказать деталей больше – на случай замены бракованных (такое бывает). В отличие от продающихся наборов, своими руками (голыми) не получится собрать квадрокоптер.
Потребуются:
- клеевой пистолет;
- отвертка;
- паяльник;
- двухсторонний скотч;
- изолента.
Когда рабочая модель будет готова, настанет время модернизации, в результате которой у квадрокоптера могут появиться светодиоды, антенна, пищалки (биперы) и др., увеличивающие функциональность.
Видео: Квадрокоптер своими руками
Обновлено: 20.09.2019
103583
Если заметили ошибку, выделите фрагмент текста и нажмите Ctrl+Enter
Чтобы собрать квадрокоптер своими руками в домашних условиях, следует сначала разобраться в базовых компонентах квадрокоптера.
Детали для сборки квадрокоптера
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm (последние три цифры в названии Q450 указывают на расстояние между моторами в мм по диагонали). Представляет собой корпус летательного аппарата, который будет использован для монтажа всего прочего оборудования и электронной начинки. Состоит их 4 лучей и печатной платы. Вес 295 грамм.
Banggood.com
Цена 922 руб.
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки.
Продается в интернет-магазине Banggood.com
Цена 571 руб/шт
- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware для регулирования оборотов и контроля скорости. 4 штуки.
Продается в интернет-магазине Banggood.com
Цена 438 руб/шт
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane, 4 штуки. Два пропеллера правостороннего вращения и два левостороннего.
Продается в интернет-магазине Banggood.com
Цена 125 руб/шт
- Модуль управления квадрокоптером KK2.1.5 kk21evo. 1 шт.
Продается в интернет-магазине Banggood.com
Цена 1680 руб
- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S ~90C Lipo Pack, необходимо готовить минимум две штуки, а лучше четыре, поскольку они быстро садятся. 1 шт.
Продается в интернет-магазине Parkflyer.ru
Цена 1268 руб/шт
- Устройство для зарядки аккумуляторов Hobby King Variable6S 50W 5A. 1 шт.
Продается в интернет-магазине Hobbyco.ru
Цена 900 руб
- Коннектор для подключения аккумулятора XT60 Male Plug 12AWG 10cm With Wire. 1 шт.
Продается в интернет-магазине Banggood.com
Цена 144 руб
- Хомуты для закрепления проводов на корпусе квадрокоптера. 1000pcs 2.0x100mm Black/ White Nylon Cable Ties Zip Ties. 1 упаковка.
Продается в интернет-магазине Banggood.com
Цена 316 руб
- Коннекторы 20 Pairs 3.5mm Bullet Connector Banana Plug For RC Battery / Motor. Для проводов регулятора. 1 упаковка.
Продается в интернет-магазине Banggood.com
Цена 256 руб
- Лента с липучкой для прикрепления аккумулятора к корпусу квадрокоптера. 1 шт.
Продается в интернет-магазине Banggood.com
Цена 79 руб
- Винты 50pcs Motor Fixing Screws Set for DJI F450 F550 HJ450 550 Quadcopter Multicopter. 1 упаковка.
Цена 217 руб
- Пульт управления квадрокоптером Spektrum DX6 V2 with AR610 Receiver. В одном комплекте поставляются приёмник и передатчик. 1 шт.
Цена 9700 руб
Итого комплект оборудования для сборки обойдется в 20018 руб.
Особенности при выборе компонентов
Базовые характеристики передатчика:
- Режимы Mode1 или Mode2. В первом режиме ручка газа находится справа, во втором режиме ручка газа находится слева.
- Частота передатчика составляет 2,4Ггц.
- Число каналов. Минимум каналов, которые требуются для осуществления управления летательным аппаратом — четыре. Управляющее оборудование от Spektrum DX6 V2 with AR610 Receiver содержит 6 каналов.
Пошаговая инструкция по сборке квадрокоптера своими руками
- Уменьшаем длину проводов на регуляторах. При подсоединении регулятора к моторам длина проводов будет значительно превышать длину луча на котором вся эта конструкция будет крепиться.
- Припаиваем коннекторы к концам проводов на регуляторе чтобы в дальнейшем можно было подключить регулятор к моторам.
- Производим монтаж двигателей — привинчиваем по 1 двигателю на каждый луч.
- Осуществляем сборку рамы. Привинчиваем лучи к плате.
- Подключаем провода регуляторов к двигателям. Кабели регулятора и двигателя соединяются в произвольном порядке. В дальнейшем может понадобиться изменение порядка подключения при окончательной конфигурации беспилотника.
При использовании выделенных регуляторов для каждого двигателя, положительный и отрицательный полюс должны соединяться с контроллером, идя лишь от одного регулятора. - Закрепляем на корпусе модуль управления двухсторонним скотчем. Его лучше всего расположить в центральной части платформы.
- Закрепляем на корпусе приемник двухсторонним скотчем и подключаем его к модулю управления. Приёмник должен быть расположен максимально близко к модулю.
Назначение каналов описано в руководстве к приёмнику. Обычно их последовательность такова:
- Элероны — канал, отвечающий за левые и правые повороты;
- Элеватор — канал, руководящий направлениями вперёд и назад;
- Газ – канал, управляющий газом. Руководит выполнением взлёта и посадки, а также переменами высоты;
- Рысканье — канал даёт возможность производить вращение квадрокоптера вокруг его оси.
- Запитываем устройство. Подключаем к коннектору аккумуляторную батарею.
Эта операция завершает процесс сборки квадрокоптера.
Наладка
- Производим запуск двигателей. Активация двигателей нуждается в выполнении процесса запуска моторов — арминга. Руководство к эксплуатации подробно рассказывает каким образом этого добиться.
Деактивация двигателей требует проведения процедуры дизарминга. - Включаем слабый газ и убеждаемся, что моторы вращаются. Характер вращения должен быть таким же, как указано на схеме в руководстве к контроллеру. При неправильном вращении двигателя нужно просто поменять местами полюса проводов, идущих от двигателя к контроллеру.
- Привинчиваем вторую платформу к корпусу квадрокоптера.
- Подсоединяем к корпусу ленту с липучкой для крепления аккумулятора.
Сборка квадрокоптера на ардуино своими руками
Заключение
Выполнять самостоятельную сборку квадрокоптера могут лишь те, кому по душе решение сложных проблем. Это должны быть люди, испытывающие наслаждение от хода разнообразных расчётов и процесса сборки устройства.
Достоинство коптера, собранного собственными руками в том, что в любой момент можно произвести его апгрейд, добавляя новое оборудование.
- Tutorial
Полностью процесс сборки и настройки я описал и , а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке.
На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них — наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер — это такой промежуточный формат, который «ни нашим, ни вашим». Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. «Промежуточность» 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой — то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. «В народе» на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Для своего квадрика моторы я взял — RCX H2205 2633KV . Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX — вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое.
С остальными комплектующими действовал по принципу «больше челленджа»:
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. В недорогие наборы для сборки часто включают контроллер CC3D, так сейчас это, пожалуй, самый дешёвый ПК. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и «пищалка». Его преемник CC3D Revolution — это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€.
Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€.
Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.)
Отдельно отмечу модную ныне тенденцию объединять несколько плат в одну. Чаще всего ПК и OSD или ПК и PDB Я не поддерживаю данную идею за парой исключений. Мне не хочется менять весь полётный контроллер из-за сгоревшей OSD. К тому же, как показывает практика, иногда такое объединение приносит проблемы .
Схема проводки
Понятное дело, что все компоненты, которым нужно питание 5В или 12В, будут получать его от BEC`ов платы распределения питания. Камеру теоретически можно было запитать напрямую от 4S-батареи, благо входное напряжение это позволяет, но ни в коем случае делать этого не стоит. Во-первых, все камеры очень восприимчивы к шумам в цепи от регуляторов, что выразится в помехах на картинке. Во-вторых, регуляторы с активным торможением (такие, как мои LittleBee), при активизации этого торможения, дают в бортовую сеть очень серьёзный импульс, что может сжечь камеру. Причём, наличие импульса напрямую зависит от износа батареи. У новых его нет, а у старых — есть. Вот познавательное видео на тему помех от регуляторов и чем их фильтровать. Так что камеру лучше питать либо от BEC`а, либо от видеопередатчика.
Также, ради улучшения качества картинки, рекомендуется пустить с камеры на OSD не только сигнальный провод, но и «землю». Если скрутить эти провода в «косичку», то «земля» действует, как экран для сигнального провода. Правда в данном случае я этого не делал.
Коли уж зашла речь о «земле», то часто спорят о том, надо ли подключать «землю» от регуляторов к ПК или достаточно одного сигнального провода. На обычном гоночном квадрокоптере однозначно надо подключать. Её отсутствие может привести к срывам синхронизации (подтверждение).
Конечная схема проводки получилась простой и лаконичной, но с парой нюансов:
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.
Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток.
Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму. - Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч + одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе — КЗ.
Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение).
Камера не помещалась по ширине между боковых пластин рамы. Немного обработал края её платы надфилем (скорее сточил шероховатости) и она встала без проблем. Но сложности на этом не кончились. Мне очень понравилось качество держателя для камеры от Diatone, но камера с ним не помещалась в раму по высоте (примерно на 8-10мм). Сначала я приколхозил держатель на наружной (верхней) стороне пластины через неопреновый демпфер, но конструкция получилась ненадёжной. Позже пришла идея максимально простого и надёжного крепления. Я взял только хомут от Diatone`овского крепления и одел его на отрезок прута с резьбой М3. Чтобы камера не сместилась вбок, я зафиксировал хомут нейлоновыми муфтами.

Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками. Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.
Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.
Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы.
Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.
Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.
С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.
Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.

Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель.
К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.
Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.

Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть
Сегодня заказать электронику для квадрокоптера из китая стоит очень дешево. Собрать раму квадрокоптера своими руками из подручных материалов и вовсе не сложно. Научиться управлять можно с помощью авиасимуляторов. Так что главное – это наличие желания сделать квадрокоптер своими руками.
Электронику для квадрокоптера лучше всего купить готовую.
Сборка радиоуправляемого квадрокоптера своими руками
Для начала надо определиться – будете использовать стандартную раму или решите изготовить свою.
Покупная рама удобна, но в случае поломки придется ждать, пока приедет запасная деталь. Самодельная рама квадрокоптера собранная своими руками позволяет починить поломку за 20-30 минут, но требует дополнительной работы при изготовлении квадрокоптера.
Наиболее простым вариантом является использование пластиковых труб для проводки проводов. Они легкие и достаточно прочные. К тому же можно купить и поворотные части и крепления к стене, которые подходят для крепления электродвигателей к раме.
В результате получается очень прочная конструкция которая позволяет возить не только электронику самого квадрокоптера, но и камеру для видеосъемки с квадрокоптера.
Немаловажная деталь для начинающих — место, где вы будете выпускать для полётов свой первый дрон. Городская местность отпадает сразу, так как дома, деревья и провода будут мешать пробным полётам. Парк так же не подходит. Одно неправильное движение — пострадать может отдыхающий и ваше новоиспечённое детище. Лучше выйти в чистое поле и рулить квадриком в своё удовольствие.
Список основных запчастей:
O моторы с контроллерами для них;
O аккумулятор для квадрокоптера и пульта управления;
O полётный контроллер;
O пульт управления с приёмом и передачей сигнала;
O зарядное устройство;
O соединительные провода, болтики и прочее;
O инструменты для работы.
Для того, чтобы в будущем осталась возможность модифицировать беспилотник для работы с видео- и фотосъёмкой, следует основание между лучами коптера сделать пошире, чтобы потом вместить остальные девайсы.
Выбор формы квадрокоптера
В первую очередь следует определиться с количеством лучей и винтов на коптере. Есть большое разнообразие в модификациях и внешних видах летающих дронов, исходя из количества лучей, выходящих из центра рамы, бывают три-, квадро-, гекса- и октокоптеры.
Количество пропеллеров может быть больше, чем лучей. Но название не меняется. Например, у квадрокоптера на каждом луче по два двигателя с пропеллерами — это не делает его октокоптером.
Наиболее популярной моделью среди коптероводов остаётся quatrocopter с расположением лучей в форме Х. Во-первых, сразу два мотора тянут вперёд всю конструкцию, а во-вторых, прицепленная видеокамера не будет видеть перед собой винты.
Что стоит учесть при подборе всех запчастей
Исходя из предполагаемого веса полной конструкции уже FPV квадрокоптера с камерой, следует собрать коптер с мощными моторами. Отсюда вытекает приобретение дополнительных аккумуляторов или установка сразу более ёмких.
Наглядное видео сборки:
Видео YouTube
Для облегчения конструкции раму можно сделать самостоятельно. Варианты есть: начиная от простых деревянных линеек, заканчивая алюминиевым профилем или трубками. На этом можно сэкономить. Главное, чтобы материал был прочный, так как при падении первое, что страдает — лучи коптера.
Конечно, есть уже готовые рамы, но следует остерегаться подделок, иначе после первого же краш-теста отлетит минимум одна «нога». На время навыка управления выигрышнее подручные материалы.
Лучи для квадрокоптера имеют оптимальный параметр — 30-60 см в длину от мотора до мотора.
Чтобы не пораниться и не косить листву ближайших деревьев, а так же для тестирования коптера в домашних условиях, на пропеллеры можно поставить специальную защиту.
К чему будет крепиться контроллер полёта и все остальные примочки? Здесь тоже можно включить фантазию. Конечно, картонка не подойдёт, но квадрат фанеры, пластиковое основание из-под бокса для CD-дисков — оптимально. Не тяжёлое и выдержит всё то, что требуется нацепить.
Моторы — их нужно сразу четыре. Для пропеллеров в основном подбираются по диаметру и мощности. Диаметр берётся от параметров рамы (если та самодельная, то на своё усмотрение).
Контроллеры управления двигателями нужны для регулировки скорости вращения лопастями. Мощность двигателей напрямую зависит от веса дрона в сборе.
Аккумуляторы для моторов могут быть разными по ёмкости. Лучше предоставить возможность менять аккомы на большие мощности и, конечно же, использовать не один, а сразу несколько.
Сами винты можно взять 9-12 см. Пара обыкновенных и 2 с обратным вращением. Желательно, чтобы к ним в комплекте шли крепежи сразу на несколько видов моторов.
Самое главное и самое затратное в quatrocopter — это его «мозги», а именно контроллер полёта — на нём нельзя экономить. Здесь следует учитывать будущие возможности беспилотника. Микроконтроллер лучше брать программируемый (например, Arduino Mega). Датчики к нему можно взять «всё в одном» All In One (гироскоп, акселерометр, барометр, магнитометр), или по минимуму — гироскоп и акселерометр.
Дополнительные функции:
· GPS — программирование маршрута полёта;
· «мягкая посадка» — fail safe (если радиосвязь с пультом потеряется, то коптер плавно сядет, а не рухнет на землю);
· FPV (first person view) — вид от первого лица, а наблюдение из планшета.
Передатчик на управляющую плату стоит подбирать по карману. Главное, чтобы было не менее четырёх каналов и частота 2,4 ГГц. Его можно купить для левши или правши.
С проводами, конечно, придётся повозиться, но в умелых руках это время пройдёт быстро.
На ножки коптера или на сами лучи на раме лучше прикрепить специальную мягкую подкладку, чтобы на твёрдых поверхностях посадка была легче.
Легко не будет, но будет интересно и занимательно!
Помимо основных материалов требуются еще и расходные – болты, гайки, шайбы.
На этом этапе из инструментов понадобятся ножовка по металлу, дрель и напильник.
После того, как все материалы подготовлены, приступаем к процессу:
· Любым удобным способом перенесите чертеж на заготовку текстолита и обрежьте ненужный материал по контуру.
· Соедините все получившиеся детали, закрепив их.
· Подготовьте отверстия под винты (на чертеже они красного цвета) сверлом диаметром в 3 миллиметра.
· После того, как лучи закреплены на раме, проделайте отверстия для облегчения конструкции (на чертеже это круги белого цвета).
· На лучах подготовьте отверстия для крепления двигателя.
· На последнем этапе обезжирьте раму и обклейте её двусторонним скотчем для гашения вибраций.
На последующих этапах понадобятся такие элементы: плата, контроллеры двигателей, пропеллеры, двигатели, аккумулятор и зарядное устройство для него, передатчик и приемник.
Для того, чтобы закрепить контроллеры на плате-адаптере, стоит использовать медный провод без изоляции. После этого производится припаивание проводов питания, провода шины, тумблер для включения и выключения питания.
При размещении контроллеров на плате стоит помнить, что все они должны быть направлены к соответствующим двигателям.
Следующий этап – установка двигателей. Начинается он с припаивания проводов к выводам двигателей их изоляции. Затем устанавливаются сами двигатели на концах лучей и закрепляются болтами с нижней стороны «ноги».
После этого наступает ответственный момент крепежа «мозга» квадрокоптера – платы-адаптера. Лучше устанавливать её на небольшие резиновые демпферы. Важно защитить плату от влаги и пыли, так что тут же закрываем её любым пластиковым колпаком. Его форма и прозрачность зависит исключительно от ваших предпочтений и на сохранность платы никак не влияет.
В подготовленный отсек крепится аккумулятор, который также лучше закреплять на резиновой прослойке.
На последнем этапе закрепляем винты на двигателях, подключаем передатчик и светодиодную подсветку.
От общего — к частному. Рама квадра должна быть прочной. Для ее изготовления подойдет кусок фанеры (150 х 150 мм), в качестве каркаса можно использовать квадратный профиль из алюминия (14 х 14 мм).
Профиля понадобятся и для изготовления лучей. Длина каждого из них от центра конструкции должна составлять 300 мм. На них, кстати, можно приспособить куски пенопласта или резины, которые будут смягчать приземление.
Далее установка платы. Ее нужно купить. Рекомендуется приобретать плату, уже оснащенную всеми датчиками — гироскопом, акселерометром, барометром и магнитометром — AllInOne. Есть варианты плат также и GPS-приемником. Датчики можно крепить к конструкции на толстый скотч или силикон — это поможет избежать сильной вибрации.
Монтировать ее надо в центре конструкции. Саморезы должны надежно прикрутить плату к концам лучей и проходить через фанеру. Рядом с ней должен находиться приемник. Его можно приклеить суперклеем.
Двигатели квадрокоптера должны располагаться на одинаковом расстоянии. Поэтому перед их расстановкой нужно сделать точную разметку на лучах и уже потом сверлить отверстия. Кстати, пространство для хвоста вала нужно делать насквозь, на всю его ширину так, чтобы он не задевал его края.
Теперь немного о проводах питания регуляторов скорости. Они соединяются параллельно с помощью переходников. Там, где к ним подключается батарея, следует делать разъемное соединение.
Теперь остается только подключить провода к соответствующим двигателям и установить “мозги”. Найти прошивку для платы (Arduino) в интернете не составляет труда. Сначала закачивается она, потом настройки. Во время установки программы будут появляться пошаговые инструкции. Им нужно четко следовать, чтобы отладить управление аппаратом и откалибровать его.
В меню программы есть раздел AC2 Sensor. Здесь проверяется работа датчиков и приемников. Все повороты и изменения уровней должны с максимальной точностью отражаться на колебаниях стрелки и светодиодных показателях.
После всей этой отладки можно устанавливать пропеллеры и тестировать полет. Аппарат при этом лучше разместить подальше от себя. Газовать следует плавно. Если дрон поднялся в воздух — великолепно. Если его начало трясти, следует перейти к настройкам PID. Возможны и другие нюансы отладки через программу.
Как разумно подобрать двигатель для квадрокоптера? Несомненно, данную деталь стоит подбирать исходя из характеристик и возможностей летающего аппарата. Использование мотора необходимо только в больших квадрокоптерах, иначе его наличие будет неоправданно и аппарат попросту не будет работать.
Главным правилом является то, что выбирать мотор стоит уже после окончательной сборки квадрокоптера. При планировании присоединять к летающему устройству видеокамеру или иное устройство, стоит учитывать дополнительный вес. Чтобы не перегружать аппарат, необходимо рассчитать тягу, которую можно посмотреть по специальным таблицам. К примеру, если вес аппарата равен 1,5 килограмма, то тяга должна быть в 2 раза больше, то есть быть равной 3 килограммам.
Чтобы правильно подобрать двигатель квадрокоптера, стоит тщательно изучить все его характерные свойства. Не менее важную роль играют винты аппарата. Квадрокоптер висит в воздухе за счет нескольких пар несущих винтов, вращающихся в различных направлениях.
Как раз для того, чтобы винты нормально работали, требуется подобрать двигатель на основе параметров своего квадрокоптера. Винты потребляют большую энергию двигателя, и мощность мотора важна при покупке.
Для подбора правильного мотора рекомендуем ознакомиться с различными видеозаписями, где вам подробно расскажут о хороших деталях для квадрокоптера. За счет советов, которые будут давать уже опытные пилоты, можно собрать уникальный квадрокоптер с мощным двигателем.
Зачем нужен мощный двигатель? Во-первых, он позволяет летать аппарату намного быстрее и дольше, совершать определенные маневры. Во-вторых, на квадрокоптер можно повесить дополнительный груз, к примеру, камеру, которая будет снимать материалы при полете на высоте. За счет этого можно сделать качественные снимки.
Следовательно, подбирать двигатель необходимо основываясь на том, какой квадрокоптер вы желаете собрать. Следует подбирать правильную мощность двигателя, иначе аппарат может либо не взлететь, либо вовсе будет неуправляемым. Чтобы избежать этого, необходимо прислушиваться к советам специалистов, и тогда собрать квадрокоптер будет очень просто.
Привет! Сегодня на повестке дня у нас очень интересная тема. Думаю, ты уже задумывался о том, что можно собрать квадрокоптер своими руками. Идея и правда интересная. Выбирая этот, не самый простой путь, ты не только получишь хороший дрон, но и сможешь понять его устройство, и получишь много полезных знаний. А часть этих знаний ты впитаешь уже сегодня. Поехали!
Перед началом стоит вспомнить – а какие же есть способы получить свой квадрокоптер? На самом деле их пять.
RTF
RTF (ready to fly) – Просто купить готовый коптер. Тебе останется его просто достать из коробки и запустить в полёт. Это хороший вариант, если тебе не интересны эти конструкторы, и ты хочешь просто удовлетворить свою потребность в БПЛА. Однако, это далеко не так весело, как оставшиеся варианты.
Комплект «всё включено»
Подойдёт тем, кто хочет сделать дрон своими руками, но не собирается часами разбираться в документациях, калькуляторах и прочих тонкостях. Там всё так-же рассчитано производителем и подогнано. Нужно только собрать и настроить. Если ты сейчас выбираешь свой первый квадрокоптер, то это определённо твой выбор.
Комплект ARF
ARF (Almost Ready to Fly) – Тут всё слегка сложнее. Бывают разные степени «готовности». Где-то нужно докупить контроллер, а где-то в комплекте идёт только рама коптера. Собрать квадрокоптер, настроить и откалибровать придётся самому. Вариант для тех, и поковыряться в своём БПЛА.
С нуля
Это выбор продвинутых юзеров. Строить коптер с нуля — значит , разрабатывать и изготавливать раму и так далее. Это сложный, но очень интересный путь, особенно, если не брать готовый модуль управления, а или raspberry pi.
Из подручных материалов
Мы не ищем лёгких путей. Дедушкин гараж, алиэкспресс и помойка электроники – наш выбор. Путь боли, ПВХ труб и хардкора, но в результате ты получишь полностью самодельный квадрокоптер. Тут полный простор для фантазии, а все необходимые комплектующие и чертежи квадрокоптеров можно найти в интернете.
Инструкция по сборке квадрокоптера своими руками (для начинающих)

А теперь давай разберёмся с тем, как собрать квадрокоптер мечты. Сразу скажу, что это обобщённый гайд, и некоторые моменты могут отличаться. Я попытаюсь систематизировать процесс, и указать на основные моменты выбора и сборки.
Детали для сборки квадрокоптера.
Сборка квадрокоптера своими руками начинается с выбора компонентов. Это самый ответственный этап.
Комплектующие рамы
Несущая конструкция коптера крайне важна. От её характеристик зависит то, сколько лишней мощности у вас останется. Чем легче рама, тем она дороже. На счёт прочности особо напрягаться не стоит, если в ваши планы не входит постройка квадрокоптера для массивных камер. Есть три основных типа рамы – четырёхлучевая, шестилучевая и восьмилучевая. В данном случае мы будем отталкиваться от четырёхлучевой компоновки с одинарными двигателями (один движок на луч).
Также рама может быть оснащена складными лучами, но это уже очень дорого, и не очень нужно. Можно попробовать реализовать это самостоятельно.
Особенности при выборе компонентов
Моторы
Чем нужно. Во-первых, если ты берёшь их в Китае, то их характеристики будут завышены. Во-вторых, это даст тебе больше простора. К примеру, если нужно будет повесить камеру потяжелее, или какой-либо другой модуль, то это не повредит лётным характеристикам.
Пропеллеры
Это тема достаточно объёмная. При нужно ориентироваться на свои потребности. Если это будет простенький коптер для «полетать», то можно смело брать пластиковые. Если же вы хотите настоящий рабочий агрегат для аэрофотосъёмки, или (что не парадоксально, ибо там каждый грамм на счету) то желательно использовать композитные материалы. Ну и не жадничай. Переплата в 10 процентов может избавить от необходимости балансировки.
Пульт и приёмник
Для начала, грамотным решением будет взять пульт, у которого в комплекте есть приёмник. Тогда они будут уже спарены, и тебе останется только присоединить приёмник к управляющей плате. Пульт тоже не бери бездумно. Обычно, приличные экземпляры с большим радиусом действия начинаются от 1 000 рублей. Многие имеют кучу функций, которыми пользоваться будет невозможно. К примеру переключатели режимов есть, а плата режимов полёта и не поддерживает. Из-за этого вес и объём занимают бесполезные переключатели.
Регуляторы оборотов
Они характеризуются по мощности, виткам мотора, внутреннему сопротивлению, наличию реверса, точности работы и куче других страшных параметров. Если есть возможность – ищи комплект двигателей с контроллерами. Если так ты не хочешь, то придётся курить форумы и документацию. В принципе, если согласовать допустимый тип моторов и выдаваемую мощность, то шанс промахнуться минимален, но я этого не говорил. Перепроверь.
Батарея
При помощи калькулятора. Он учитывает много параметров, включая вес самого батарейного блока. Дешёвки снова не советую брать. Горит красиво, но слишком быстро. , и оснащён мощными моторами и прочим навесным оборудованием с высоким потреблением энергии, то не забудь проверить, хватит ли мощности аккумуляторов.
Камера
Ух, вот это самая жесть. Камера не всегда нужна, но если она нужна, то . В качестве записывающей камеры стоит использовать экшн камеры- GoPro или её Китайские аналоги (они не сильно уступают в качестве видео, если даже не превосходят «фирму»). Нужно ориентироваться на вес, и на угол обзора. С весом всё понятно, а вот про угол расскажу.
Хочется, чтобы камера снимала красоты мира, но не снимала лучи коптера. Если ты промахнулся и это произошло, то придётся выбрать из двух плохих вариантов.
Опустить камеру так, чтоб она не задевала пропеллеры. Опускать, скорее всего, придётся сильно, и это вызовет массу проблем с взлётом и посадкой, а также с маневренностью, из-за смещённого центра тяжести.
Вынести камеру вперёд. Тоже беда. Снова сместится центр тяжести (в этом случае можно попытаться уравновесить при помощи АКБ). Ещё сильнее утяжелит конструкцию, ибо придётся придумывать очень мощный фиксатор. Иначе никакими бюджетными виброгасителями делу не поможешь, и эффект желе обеспечен.
Можно попробовать использовать ориентировочную формулу L= 2 * tg (A /2) х D, где:
- L — Область обзора камеры на расстоянии D
- Α — Угол обзора камеры
- D – расстояние до объекта (в нашем случае, до пропеллеров)
Ты получишь диаметр круга, но так как камера снимает прямоугольное изображение, то этот диаметр будет диагональю. Там уж можно примерно прикинуть- задевает, или нет.
Компоненты выбираем, руководствуясь необходимым результатом. Не нужно брать самое лучшее, если в этом нет необходимости. Возможности своей сборки ты можешь приблизительно рассчитать при помощи калькулятора.
Китайские детали
Сразу говорю – в Китае брать можно, но стоит намного серьёзнее подойти к вопросу. Китайцы постоянно завышают характеристики. Так что, нужно примерно понимать, как и что работает, и не вестись на россказни Китайца о небывалых параметрах и чудесном качестве. Короче говоря – можно, но с пониманием дела и на свой страх и риск.
Контроллер
Контроллер, это мозг твоего мультикоптера. Их можно разделить на два вида.
Универсальный: Например, DJI NAZA. Такой контроллер можно использовать с абсолютно любой сборкой. Будь то квадрокоптер, или октокоптер. Он не заточен под управление чем-то конкретным. На него можно подвесить кучу оборудования, он обладает многими функциями и датчиками.
Есть и минусы. Первый минус, это цена. Тот же DJI Naza-M V2 стоит 17 000 рублей. Второй минус- необходимость настройки. Для этого используется специальная программа, написанная под конкретный контроллер. Там можно заменить и отрегулировать практически всё, но это требует определённых сил, знаний и времени.
Специализированный: Как в последующем примере. Он уже заточен под работу с конкретной компоновкой коптера. Конечно, он даёт некоторый простор, но мощность на каждом двигателе вы не настроите. Стоит недорого, умеет мало. Самое то, для начала.
Пошаговая инструкция по сборке
Давайте условимся на том, что ты прочитал нашу статью про выбор набора для сборки квадрокоптера,и воспользовался ценнейшем советом – брать раму с платой распределения. Если нет, то провода подключаем сразу к модулю управления.

Для примера рассмотрим сборку из следующих комплектующих:
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки
- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления квадрокоптером KK2.1.5 kk21evo
- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Устройство для зарядки аккумуляторов Hobby King Variable6S 50W 5A
- Коннектор для подключения аккумулятора XT60 Male Plug 12AWG 10cm With Wire
- Коннекторы 20 Pairs 3.5mm Bullet Connector Banana Plug For RC Battery / Motor
- Пульт управления квадрокоптером Spektrum DX6 V2 with AR610 Receiver (в комплекте с приёмником и передатчиком)
Примерная цена- 20 000 рублей
Размазываем компоненты по столу ровным слоем, и начинаем.
Этап первый. Сборка
- Примерно прикидываешь необходимую длину проводов контроллера, прибавляешь небольшой запас «на криворукость» и обрезаешь их до нужной длины
- Припаиваешь коннекторы к выходам регуляторов, чтобы потом проще было подключать моторы
- Припаиваешь регуляторы к плате разводки
- Припаиваешь коннектор аккумуляторного блока к плате разводки
- Прикручиваешь двигатели на лучи коптера. При установке моторов постарайся не сорвать резьбу
- Если коннекторов на двигателях нет, то припаиваешь и их
- Привинчиваешь лучи с двигателями к плате
- Крепишь регуляторы к лучам дрона. Не важно чем, но удобнее всего пластиковыми хомутами
- Подключаем провода регуляторов к двигателям в произвольном порядке. Если будет нужно – потом изменим
- Закрепляешь на корпусе модуль управления (предварительно сфотографировав тыльную часть. Пригодится). Снова хоть на жвачку, но советую пока использовать мягкий двухсторонний скотч
- Подключаешь регуляторы оборотов к контроллеру. В те порты, которые отмечены (+ — пусто), обычно подключается белым проводом к экрану
- Остатками скотча закрепляешь приёмник как можно ближе к блоку управления, и подключаешь нужные каналы к нужным портам. Используй документацию своего приёмника и фото тыльной стороны платы, чтобы разобраться какая пачка проводов за что отвечает
- Подключишь питание устройства от батареи, через коннектор
- Profit! Ты собрал свой квадрокоптер
Этап второй. Отладка
- Запускаешь двигатели (тут обычно всё по-разному, так что снова смотри документацию)
- Немного прибавляешь газ, и смотришь в какую сторону вращаются пропеллеры. Они должны вращаться так, как указано в схеме, которая прилагается к контроллеру. Иначе управление будет инвертироваться. Если что-то не так, то просто переворачиваешь коннектор, который соединяет двигатель и контроллер
- Когда всё вращается правильно – прикручиваешь верхнюю деталь рамы. Не заталкивай её на своё место. Если она встаёт туго, значит что-то пошло не так. Ослабь нижние винтики, а после установки затяни всё равномерно
- Закрепляешь блок с аккумуляторами
- Монтируешь адаптеры для пропеллеров на моторы
- Устанавливаешь пропеллеры, учитывая направление вращения моторов. Приподнятая часть лопасти должна смотреть в направлении вращения
- Готово.Твой коптер готов пережить первое включение!
Это был один из простейших примеров, с которого стоит начать. Конечно, если ты хочешь использовать камеру, GPS или более сложный контроллер, то конструкция будет сложнее. Поэтому, если вы не уверены в своих силах, то стоит начать с малого. Всё остальное можно прикрутить потом.
Однако, не стоит переоценивать сложность самоделки. Если нет цели собрать мультикоптер из ПВХ труб на базе ардуино (а такое тоже бывает), то в этом нет ничего, что не смог бы рядовой пользователь. Главное не теряться, читать и спрашивать, если что-то не понятно.
Заключение
Напоследок хочется внести в этот текст немного морали. Любое подобное занятие, будь то проектирование, или просто сборка – является мощнейшим образовательным инструментом. Главное, это просто начать. Ты начнёшь понимать многие тонкости, и научишься концентрировать внимание на важных моментах. Это относится не только к сборке коптеров.
Сегодня заказать электронику для квадрокоптера из китая стоит очень дешево. Собрать раму квадрокоптера своими руками из подручных материалов и вовсе не сложно. Научиться управлять можно с помощью авиасимуляторов. Так что главное – это наличие желания сделать квадрокоптер своими руками.
Электронику для квадрокоптера лучше всего купить готовую.
Сборка радиоуправляемого квадрокоптера своими руками
Для начала надо определиться – будете использовать стандартную раму или решите изготовить свою.
Покупная рама удобна, но в случае поломки придется ждать, пока приедет запасная деталь. Самодельная рама квадрокоптера собранная своими руками позволяет починить поломку за 20-30 минут, но требует дополнительной работы при изготовлении квадрокоптера.
Наиболее простым вариантом является использование пластиковых труб для проводки проводов. Они легкие и достаточно прочные. К тому же можно купить и поворотные части и крепления к стене, которые подходят для крепления электродвигателей к раме.
В результате получается очень прочная конструкция которая позволяет возить не только электронику самого квадрокоптера, но и камеру для видеосъемки с квадрокоптера.
Немаловажная деталь для начинающих — место, где вы будете выпускать для полётов свой первый дрон. Городская местность отпадает сразу, так как дома, деревья и провода будут мешать пробным полётам. Парк так же не подходит. Одно неправильное движение — пострадать может отдыхающий и ваше новоиспечённое детище. Лучше выйти в чистое поле и рулить квадриком в своё удовольствие.
Список основных запчастей:
O моторы с контроллерами для них;
O аккумулятор для квадрокоптера и пульта управления;
O полётный контроллер;
O пульт управления с приёмом и передачей сигнала;
O зарядное устройство;
O соединительные провода, болтики и прочее;
O инструменты для работы.
Для того, чтобы в будущем осталась возможность модифицировать беспилотник для работы с видео- и фотосъёмкой, следует основание между лучами коптера сделать пошире, чтобы потом вместить остальные девайсы.
Выбор формы квадрокоптера
В первую очередь следует определиться с количеством лучей и винтов на коптере. Есть большое разнообразие в модификациях и внешних видах летающих дронов, исходя из количества лучей, выходящих из центра рамы, бывают три-, квадро-, гекса- и октокоптеры.
Количество пропеллеров может быть больше, чем лучей. Но название не меняется. Например, у квадрокоптера на каждом луче по два двигателя с пропеллерами — это не делает его октокоптером.
Наиболее популярной моделью среди коптероводов остаётся quatrocopter с расположением лучей в форме Х. Во-первых, сразу два мотора тянут вперёд всю конструкцию, а во-вторых, прицепленная видеокамера не будет видеть перед собой винты.
Что стоит учесть при подборе всех запчастей
Исходя из предполагаемого веса полной конструкции уже FPV квадрокоптера с камерой, следует собрать коптер с мощными моторами. Отсюда вытекает приобретение дополнительных аккумуляторов или установка сразу более ёмких.
Наглядное видео сборки:
Видео YouTube
Для облегчения конструкции раму можно сделать самостоятельно. Варианты есть: начиная от простых деревянных линеек, заканчивая алюминиевым профилем или трубками. На этом можно сэкономить. Главное, чтобы материал был прочный, так как при падении первое, что страдает — лучи коптера.
Конечно, есть уже готовые рамы, но следует остерегаться подделок, иначе после первого же краш-теста отлетит минимум одна «нога». На время навыка управления выигрышнее подручные материалы.
Лучи для квадрокоптера имеют оптимальный параметр — 30-60 см в длину от мотора до мотора.
Чтобы не пораниться и не косить листву ближайших деревьев, а так же для тестирования коптера в домашних условиях, на пропеллеры можно поставить специальную защиту.
К чему будет крепиться контроллер полёта и все остальные примочки? Здесь тоже можно включить фантазию. Конечно, картонка не подойдёт, но квадрат фанеры, пластиковое основание из-под бокса для CD-дисков — оптимально. Не тяжёлое и выдержит всё то, что требуется нацепить.
Моторы — их нужно сразу четыре. Для пропеллеров в основном подбираются по диаметру и мощности. Диаметр берётся от параметров рамы (если та самодельная, то на своё усмотрение).
Контроллеры управления двигателями нужны для регулировки скорости вращения лопастями. Мощность двигателей напрямую зависит от веса дрона в сборе.
Аккумуляторы для моторов могут быть разными по ёмкости. Лучше предоставить возможность менять аккомы на большие мощности и, конечно же, использовать не один, а сразу несколько.
Сами винты можно взять 9-12 см. Пара обыкновенных и 2 с обратным вращением. Желательно, чтобы к ним в комплекте шли крепежи сразу на несколько видов моторов.
Самое главное и самое затратное в quatrocopter — это его «мозги», а именно контроллер полёта — на нём нельзя экономить. Здесь следует учитывать будущие возможности беспилотника. Микроконтроллер лучше брать программируемый (например, Arduino Mega). Датчики к нему можно взять «всё в одном» All In One (гироскоп, акселерометр, барометр, магнитометр), или по минимуму — гироскоп и акселерометр.
Дополнительные функции:
· GPS — программирование маршрута полёта;
· «мягкая посадка» — fail safe (если радиосвязь с пультом потеряется, то коптер плавно сядет, а не рухнет на землю);
· FPV (first person view) — вид от первого лица, а наблюдение из планшета.
Передатчик на управляющую плату стоит подбирать по карману. Главное, чтобы было не менее четырёх каналов и частота 2,4 ГГц. Его можно купить для левши или правши.
С проводами, конечно, придётся повозиться, но в умелых руках это время пройдёт быстро.
На ножки коптера или на сами лучи на раме лучше прикрепить специальную мягкую подкладку, чтобы на твёрдых поверхностях посадка была легче.
Легко не будет, но будет интересно и занимательно!
Помимо основных материалов требуются еще и расходные – болты, гайки, шайбы.
На этом этапе из инструментов понадобятся ножовка по металлу, дрель и напильник.
После того, как все материалы подготовлены, приступаем к процессу:
· Любым удобным способом перенесите чертеж на заготовку текстолита и обрежьте ненужный материал по контуру.
· Соедините все получившиеся детали, закрепив их.
· Подготовьте отверстия под винты (на чертеже они красного цвета) сверлом диаметром в 3 миллиметра.
· После того, как лучи закреплены на раме, проделайте отверстия для облегчения конструкции (на чертеже это круги белого цвета).
· На лучах подготовьте отверстия для крепления двигателя.
· На последнем этапе обезжирьте раму и обклейте её двусторонним скотчем для гашения вибраций.
На последующих этапах понадобятся такие элементы: плата, контроллеры двигателей, пропеллеры, двигатели, аккумулятор и зарядное устройство для него, передатчик и приемник.
Для того, чтобы закрепить контроллеры на плате-адаптере, стоит использовать медный провод без изоляции. После этого производится припаивание проводов питания, провода шины, тумблер для включения и выключения питания.
При размещении контроллеров на плате стоит помнить, что все они должны быть направлены к соответствующим двигателям.
Следующий этап – установка двигателей. Начинается он с припаивания проводов к выводам двигателей их изоляции. Затем устанавливаются сами двигатели на концах лучей и закрепляются болтами с нижней стороны «ноги».
После этого наступает ответственный момент крепежа «мозга» квадрокоптера – платы-адаптера. Лучше устанавливать её на небольшие резиновые демпферы. Важно защитить плату от влаги и пыли, так что тут же закрываем её любым пластиковым колпаком. Его форма и прозрачность зависит исключительно от ваших предпочтений и на сохранность платы никак не влияет.
В подготовленный отсек крепится аккумулятор, который также лучше закреплять на резиновой прослойке.
На последнем этапе закрепляем винты на двигателях, подключаем передатчик и светодиодную подсветку.
От общего — к частному. Рама квадра должна быть прочной. Для ее изготовления подойдет кусок фанеры (150 х 150 мм), в качестве каркаса можно использовать квадратный профиль из алюминия (14 х 14 мм).
Профиля понадобятся и для изготовления лучей. Длина каждого из них от центра конструкции должна составлять 300 мм. На них, кстати, можно приспособить куски пенопласта или резины, которые будут смягчать приземление.
Далее установка платы. Ее нужно купить. Рекомендуется приобретать плату, уже оснащенную всеми датчиками — гироскопом, акселерометром, барометром и магнитометром — AllInOne. Есть варианты плат также и GPS-приемником. Датчики можно крепить к конструкции на толстый скотч или силикон — это поможет избежать сильной вибрации.
Монтировать ее надо в центре конструкции. Саморезы должны надежно прикрутить плату к концам лучей и проходить через фанеру. Рядом с ней должен находиться приемник. Его можно приклеить суперклеем.
Двигатели квадрокоптера должны располагаться на одинаковом расстоянии. Поэтому перед их расстановкой нужно сделать точную разметку на лучах и уже потом сверлить отверстия. Кстати, пространство для хвоста вала нужно делать насквозь, на всю его ширину так, чтобы он не задевал его края.
Теперь немного о проводах питания регуляторов скорости. Они соединяются параллельно с помощью переходников. Там, где к ним подключается батарея, следует делать разъемное соединение.
Теперь остается только подключить провода к соответствующим двигателям и установить “мозги”. Найти прошивку для платы (Arduino) в интернете не составляет труда. Сначала закачивается она, потом настройки. Во время установки программы будут появляться пошаговые инструкции. Им нужно четко следовать, чтобы отладить управление аппаратом и откалибровать его.
В меню программы есть раздел AC2 Sensor. Здесь проверяется работа датчиков и приемников. Все повороты и изменения уровней должны с максимальной точностью отражаться на колебаниях стрелки и светодиодных показателях.
После всей этой отладки можно устанавливать пропеллеры и тестировать полет. Аппарат при этом лучше разместить подальше от себя. Газовать следует плавно. Если дрон поднялся в воздух — великолепно. Если его начало трясти, следует перейти к настройкам PID. Возможны и другие нюансы отладки через программу.
Как разумно подобрать двигатель для квадрокоптера? Несомненно, данную деталь стоит подбирать исходя из характеристик и возможностей летающего аппарата. Использование мотора необходимо только в больших квадрокоптерах, иначе его наличие будет неоправданно и аппарат попросту не будет работать.
Главным правилом является то, что выбирать мотор стоит уже после окончательной сборки квадрокоптера. При планировании присоединять к летающему устройству видеокамеру или иное устройство, стоит учитывать дополнительный вес. Чтобы не перегружать аппарат, необходимо рассчитать тягу, которую можно посмотреть по специальным таблицам. К примеру, если вес аппарата равен 1,5 килограмма, то тяга должна быть в 2 раза больше, то есть быть равной 3 килограммам.
Чтобы правильно подобрать двигатель квадрокоптера, стоит тщательно изучить все его характерные свойства. Не менее важную роль играют винты аппарата. Квадрокоптер висит в воздухе за счет нескольких пар несущих винтов, вращающихся в различных направлениях.
Как раз для того, чтобы винты нормально работали, требуется подобрать двигатель на основе параметров своего квадрокоптера. Винты потребляют большую энергию двигателя, и мощность мотора важна при покупке.
Для подбора правильного мотора рекомендуем ознакомиться с различными видеозаписями, где вам подробно расскажут о хороших деталях для квадрокоптера. За счет советов, которые будут давать уже опытные пилоты, можно собрать уникальный квадрокоптер с мощным двигателем.
Зачем нужен мощный двигатель? Во-первых, он позволяет летать аппарату намного быстрее и дольше, совершать определенные маневры. Во-вторых, на квадрокоптер можно повесить дополнительный груз, к примеру, камеру, которая будет снимать материалы при полете на высоте. За счет этого можно сделать качественные снимки.
Следовательно, подбирать двигатель необходимо основываясь на том, какой квадрокоптер вы желаете собрать. Следует подбирать правильную мощность двигателя, иначе аппарат может либо не взлететь, либо вовсе будет неуправляемым. Чтобы избежать этого, необходимо прислушиваться к советам специалистов, и тогда собрать квадрокоптер будет очень просто.
Привет! Сегодня на повестке дня у нас очень интересная тема. Думаю, ты уже задумывался о том, что можно собрать квадрокоптер своими руками. Идея и правда интересная. Выбирая этот, не самый простой путь, ты не только получишь хороший дрон, но и сможешь понять его устройство, и получишь много полезных знаний. А часть этих знаний ты впитаешь уже сегодня. Поехали!
Варианты
Перед началом стоит вспомнить – а какие же есть способы получить свой квадрокоптер? На самом деле их пять.
RTF

RTF (ready to fly) – Просто купить готовый коптер. Тебе останется его просто достать из коробки и запустить в полёт. Это хороший вариант, если тебе не интересны эти конструкторы, и ты хочешь просто удовлетворить свою потребность в БПЛА. Однако, это далеко не так весело, как оставшиеся варианты.
Комплект «всё включено»
Такой комплект подойдёт тем, кто хочет сделать дрон своими руками, но не собирается часами разбираться в документациях, калькуляторах и прочих тонкостях. Там всё так-же рассчитано производителем и подогнано. Нужно только собрать и настроить. Если ты сейчас выбираешь свой первый квадрокоптер, то это определённо твой выбор.
Комплект ARF

ARF (Almost Ready to Fly) – Тут всё слегка сложнее. Бывают разные степени «готовности». Где-то нужно докупить контроллер, а где-то в комплекте идёт только рама коптера. Собрать квадрокоптер, настроить и откалибровать придётся самому. Вариант для тех, кто хочет углубиться в тему и поковыряться в своём БПЛА.
С нуля
Это выбор продвинутых юзеров. Строить коптер с нуля — значит самостоятельно подбирать оптимальные компоненты, разрабатывать и изготавливать раму и так далее. Это сложный, но очень интересный путь, особенно, если не брать готовый модуль управления, а попытаться использовать Arduino или raspberry pi.
Из подручных материалов

Мы не ищем лёгких путей. Дедушкин гараж, алиэкспресс и помойка электроники – наш выбор. Путь боли, ПВХ труб и хардкора, но в результате ты получишь полностью самодельный квадрокоптер. Тут полный простор для фантазии, а все необходимые комплектующие и чертежи квадрокоптеров можно найти в интернете.
Инструкция по сборке квадрокоптера своими руками (для начинающих)

А теперь давай разберёмся с тем, как собрать квадрокоптер мечты. Сразу скажу, что это обобщённый гайд, и некоторые моменты могут отличаться. Я попытаюсь систематизировать процесс, и указать на основные моменты выбора и сборки.
Детали для сборки квадрокоптера.
Сборка квадрокоптера своими руками начинается с выбора компонентов. Это самый ответственный этап.
Комплектующие рамы

Несущая конструкция коптера крайне важна. От её характеристик зависит то, сколько лишней мощности у вас останется. Чем легче рама, тем она дороже. На счёт прочности особо напрягаться не стоит, если в ваши планы не входит постройка квадрокоптера для массивных камер. Есть три основных типа рамы – четырёхлучевая, шестилучевая и восьмилучевая. В данном случае мы будем отталкиваться от четырёхлучевой компоновки с одинарными двигателями (один движок на луч).
Также рама может быть оснащена складными лучами, но это уже очень дорого, и не очень нужно. Можно попробовать реализовать это самостоятельно.
Особенности при выборе компонентов
Моторы

Моторы советую брать чуть помощнее, чем нужно. Во-первых, если ты берёшь их в Китае, то их характеристики будут завышены. Во-вторых, это даст тебе больше простора. К примеру, если нужно будет повесить камеру потяжелее, или какой-либо другой модуль, то это не повредит лётным характеристикам.
Пропеллеры
Это тема достаточно объёмная. При выборе винтов нужно ориентироваться на свои потребности. Если это будет простенький коптер для «полетать», то можно смело брать пластиковые. Если же вы хотите настоящий рабочий агрегат для аэрофотосъёмки, или спортивный мини дрон (что не парадоксально, ибо там каждый грамм на счету) то желательно использовать композитные материалы. Ну и не жадничай. Переплата в 10 процентов может избавить от необходимости балансировки.
Пульт и приёмник

Для начала, грамотным решением будет взять пульт, у которого в комплекте есть приёмник. Тогда они будут уже спарены, и тебе останется только присоединить приёмник к управляющей плате. Пульт тоже не бери бездумно. Обычно, приличные экземпляры с большим радиусом действия начинаются от 1 000 рублей. Многие имеют кучу функций, которыми пользоваться будет невозможно. К примеру переключатели режимов есть, а плата режимов полёта и не поддерживает. Из-за этого вес и объём занимают бесполезные переключатели.
Регуляторы оборотов
Они характеризуются по мощности, виткам мотора, внутреннему сопротивлению, наличию реверса, точности работы и куче других страшных параметров. Если есть возможность – ищи комплект двигателей с контроллерами. Если так ты не хочешь, то придётся курить форумы и документацию. В принципе, если согласовать допустимый тип моторов и выдаваемую мощность, то шанс промахнуться минимален, но я этого не говорил. Перепроверь.
Батарея

Необходимая батарея рассчитывается при помощи калькулятора. Он учитывает много параметров, включая вес самого батарейного блока. Дешёвки снова не советую брать. Горит красиво, но слишком быстро. Если коптер – грузовой, и оснащён мощными моторами и прочим навесным оборудованием с высоким потреблением энергии, то не забудь проверить, хватит ли мощности аккумуляторов.
Камера
Ух, вот это самая жесть. Камера не всегда нужна, но если она нужна, то нужно внимательно подойти к её выбору. В качестве записывающей камеры стоит использовать экшн камеры- GoPro или её Китайские аналоги (они не сильно уступают в качестве видео, если даже не превосходят «фирму»). Нужно ориентироваться на вес, и на угол обзора. С весом всё понятно, а вот про угол расскажу.

Хочется, чтобы камера снимала красоты мира, но не снимала лучи коптера. Если ты промахнулся и это произошло, то придётся выбрать из двух плохих вариантов.
Опустить камеру так, чтоб она не задевала пропеллеры. Опускать, скорее всего, придётся сильно, и это вызовет массу проблем с взлётом и посадкой, а также с маневренностью, из-за смещённого центра тяжести.
Вынести камеру вперёд. Тоже беда. Снова сместится центр тяжести (в этом случае можно попытаться уравновесить при помощи АКБ). Ещё сильнее утяжелит конструкцию, ибо придётся придумывать очень мощный фиксатор. Иначе никакими бюджетными виброгасителями делу не поможешь, и эффект желе обеспечен.
Можно попробовать использовать ориентировочную формулу L= 2 * tg (A /2) х D, где:
- L — Область обзора камеры на расстоянии D
- Α — Угол обзора камеры
- D – расстояние до объекта (в нашем случае, до пропеллеров)
Ты получишь диаметр круга, но так как камера снимает прямоугольное изображение, то этот диаметр будет диагональю. Там уж можно примерно прикинуть- задевает, или нет.
Компоненты выбираем, руководствуясь необходимым результатом. Не нужно брать самое лучшее, если в этом нет необходимости. Возможности своей сборки ты можешь приблизительно рассчитать при помощи калькулятора.
Китайские детали
Сразу говорю – в Китае брать можно, но стоит намного серьёзнее подойти к вопросу. Китайцы постоянно завышают характеристики. Так что, нужно примерно понимать, как и что работает, и не вестись на россказни Китайца о небывалых параметрах и чудесном качестве. Короче говоря – можно, но с пониманием дела и на свой страх и риск.
Контроллер
Контроллер, это мозг твоего мультикоптера. Их можно разделить на два вида.

Универсальный: Например, DJI NAZA. Такой контроллер можно использовать с абсолютно любой сборкой. Будь то квадрокоптер, гексакоптер или октокоптер. Он не заточен под управление чем-то конкретным. На него можно подвесить кучу оборудования, он обладает многими функциями и датчиками.
Есть и минусы. Первый минус, это цена. Тот же DJI Naza-M V2 стоит 17 000 рублей. Второй минус- необходимость настройки. Для этого используется специальная программа, написанная под конкретный контроллер. Там можно заменить и отрегулировать практически всё, но это требует определённых сил, знаний и времени.
Специализированный: Как в последующем примере. Он уже заточен под работу с конкретной компоновкой коптера. Конечно, он даёт некоторый простор, но мощность на каждом двигателе вы не настроите. Стоит недорого, умеет мало. Самое то, для начала.
Пошаговая инструкция по сборке
Давайте условимся на том, что ты прочитал нашу статью про выбор набора для сборки квадрокоптера ,и воспользовался ценнейшем советом – брать раму с платой распределения. Если нет, то провода подключаем сразу к модулю управления.

Для примера рассмотрим сборку из следующих комплектующих:
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки
- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления квадрокоптером KK2.1.5 kk21evo
- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Устройство для зарядки аккумуляторов Hobby King Variable6S 50W 5A
- Коннектор для подключения аккумулятора XT60 Male Plug 12AWG 10cm With Wire
- Коннекторы 20 Pairs 3.5mm Bullet Connector Banana Plug For RC Battery / Motor
- Пульт управления квадрокоптером Spektrum DX6 V2 with AR610 Receiver (в комплекте с приёмником и передатчиком)
Примерная цена- 20 000 рублей
Размазываем компоненты по столу ровным слоем, и начинаем.
Этап первый. Сборка

- Примерно прикидываешь необходимую длину проводов контроллера, прибавляешь небольшой запас «на криворукость» и обрезаешь их до нужной длины
- Припаиваешь коннекторы к выходам регуляторов, чтобы потом проще было подключать моторы
- Припаиваешь регуляторы к плате разводки
- Припаиваешь коннектор аккумуляторного блока к плате разводки
- Прикручиваешь двигатели на лучи коптера. При установке моторов постарайся не сорвать резьбу
- Если коннекторов на двигателях нет, то припаиваешь и их
- Привинчиваешь лучи с двигателями к плате
- Крепишь регуляторы к лучам дрона. Не важно чем, но удобнее всего пластиковыми хомутами
- Подключаем провода регуляторов к двигателям в произвольном порядке. Если будет нужно – потом изменим
- Закрепляешь на корпусе модуль управления (предварительно сфотографировав тыльную часть. Пригодится). Снова хоть на жвачку, но советую пока использовать мягкий двухсторонний скотч
- Подключаешь регуляторы оборотов к контроллеру. В те порты, которые отмечены (+ — пусто), обычно подключается белым проводом к экрану
- Остатками скотча закрепляешь приёмник как можно ближе к блоку управления, и подключаешь нужные каналы к нужным портам. Используй документацию своего приёмника и фото тыльной стороны платы, чтобы разобраться какая пачка проводов за что отвечает
- Подключишь питание устройства от батареи, через коннектор
- Profit! Ты собрал свой квадрокоптер
Этап второй. Отладка

- Запускаешь двигатели (тут обычно всё по-разному, так что снова смотри документацию)
- Немного прибавляешь газ, и смотришь в какую сторону вращаются пропеллеры. Они должны вращаться так, как указано в схеме, которая прилагается к контроллеру. Иначе управление будет инвертироваться. Если что-то не так, то просто переворачиваешь коннектор, который соединяет двигатель и контроллер
- Когда всё вращается правильно – прикручиваешь верхнюю деталь рамы. Не заталкивай её на своё место. Если она встаёт туго, значит что-то пошло не так. Ослабь нижние винтики, а после установки затяни всё равномерно
- Закрепляешь блок с аккумуляторами
- Монтируешь адаптеры для пропеллеров на моторы
- Устанавливаешь пропеллеры, учитывая направление вращения моторов. Приподнятая часть лопасти должна смотреть в направлении вращения
- Готово.Твой коптер готов пережить первое включение!
Это был один из простейших примеров, с которого стоит начать. Конечно, если ты хочешь использовать камеру, GPS или более сложный контроллер, то конструкция будет сложнее. Поэтому, если вы не уверены в своих силах, то стоит начать с малого. Всё остальное можно прикрутить потом.
Однако, не стоит переоценивать сложность самоделки. Если нет цели собрать мультикоптер из ПВХ труб на базе ардуино (а такое тоже бывает), то в этом нет ничего, что не смог бы рядовой пользователь. Главное не теряться, читать и спрашивать, если что-то не понятно.
Заключение
Напоследок хочется внести в этот текст немного морали. Любое подобное занятие, будь то проектирование, или просто сборка – является мощнейшим образовательным инструментом. Главное, это просто начать. Ты начнёшь понимать многие тонкости, и научишься концентрировать внимание на важных моментах. Это относится не только к сборке коптеров.
Тебе придётся научиться искать информацию, гуглить, и разбираться в массе вещей. Они тебе не пригодятся в жизни, но ими ты не слабо прокачаешь интеллект. Дерзай, учись, развивайся, и не бойся экспериментировать!
Кстати, расскажи в комментах о том, что ты думаешь об этой теме. Также можешь подписаться на наши группы (кнопки внизу). Тебе не сложно — мне приятно. Удачи, пилот, и да прибудет с тобой подъёмная сила.
![]() Загрузка…
Загрузка…
Квадрокоптер своими руками: пошаговые этапы сборки
Привет! Сегодня на повестке дня у нас очень интересная тема. Думаю, ты уже задумывался о том, что можно собрать квадрокоптер своими руками. Идея и правда интересная. Выбирая этот, не самый простой путь, ты не только получишь хороший дрон, но и сможешь понять его устройство, и получишь много полезных знаний. А часть этих знаний ты впитаешь уже сегодня. Поехали!
Варианты
Перед началом стоит вспомнить – а какие же есть способы получить свой квадрокоптер? На самом деле их пять.
RTF

RTF (ready to fly) – Просто купить готовый коптер. Тебе останется его просто достать из коробки и запустить в полёт. Это хороший вариант, если тебе не интересны эти конструкторы, и ты хочешь просто удовлетворить свою потребность в БПЛА. Однако, это далеко не так весело, как оставшиеся варианты.
Комплект «всё включено»
Такой комплект подойдёт тем, кто хочет сделать дрон своими руками, но не собирается часами разбираться в документациях, калькуляторах и прочих тонкостях. Там всё так-же рассчитано производителем и подогнано. Нужно только собрать и настроить. Если ты сейчас выбираешь свой первый квадрокоптер, то это определённо твой выбор.
Комплект ARF

ARF (Almost Ready to Fly) – Тут всё слегка сложнее. Бывают разные степени «готовности». Где-то нужно докупить контроллер, а где-то в комплекте идёт только рама коптера. Собрать квадрокоптер, настроить и откалибровать придётся самому. Вариант для тех, кто хочет углубиться в тему и поковыряться в своём БПЛА.
С нуля
Это выбор продвинутых юзеров. Строить коптер с нуля — значит самостоятельно подбирать оптимальные компоненты, разрабатывать и изготавливать раму и так далее. Это сложный, но очень интересный путь, особенно, если не брать готовый модуль управления, а попытаться использовать Arduino или raspberry pi.
Из подручных материалов

Мы не ищем лёгких путей. Дедушкин гараж, алиэкспресс и помойка электроники – наш выбор. Путь боли, ПВХ труб и хардкора, но в результате ты получишь полностью самодельный квадрокоптер. Тут полный простор для фантазии, а все необходимые комплектующие и чертежи квадрокоптеров можно найти в интернете.
Инструкция по сборке квадрокоптера своими руками (для начинающих)

А теперь давай разберёмся с тем, как собрать квадрокоптер мечты. Сразу скажу, что это обобщённый гайд, и некоторые моменты могут отличаться. Я попытаюсь систематизировать процесс, и указать на основные моменты выбора и сборки.
Детали для сборки квадрокоптера.
Сборка квадрокоптера своими руками начинается с выбора компонентов. Это самый ответственный этап.
Комплектующие рамы

Несущая конструкция коптера крайне важна. От её характеристик зависит то, сколько лишней мощности у вас останется. Чем легче рама, тем она дороже. На счёт прочности особо напрягаться не стоит, если в ваши планы не входит постройка квадрокоптера для массивных камер. Есть три основных типа рамы – четырёхлучевая, шестилучевая и восьмилучевая. В данном случае мы будем отталкиваться от четырёхлучевой компоновки с одинарными двигателями (один движок на луч).
Также рама может быть оснащена складными лучами, но это уже очень дорого, и не очень нужно. Можно попробовать реализовать это самостоятельно.
Особенности при выборе компонентов
Моторы

Моторы советую брать чуть помощнее, чем нужно. Во-первых, если ты берёшь их в Китае, то их характеристики будут завышены. Во-вторых, это даст тебе больше простора. К примеру, если нужно будет повесить камеру потяжелее, или какой-либо другой модуль, то это не повредит лётным характеристикам.
Пропеллеры
Это тема достаточно объёмная. При выборе винтов нужно ориентироваться на свои потребности. Если это будет простенький коптер для «полетать», то можно смело брать пластиковые. Если же вы хотите настоящий рабочий агрегат для аэрофотосъёмки, или спортивный мини дрон (что не парадоксально, ибо там каждый грамм на счету) то желательно использовать композитные материалы. Ну и не жадничай. Переплата в 10 процентов может избавить от необходимости балансировки.
Пульт и приёмник

Для начала, грамотным решением будет взять пульт, у которого в комплекте есть приёмник. Тогда они будут уже спарены, и тебе останется только присоединить приёмник к управляющей плате. Пульт тоже не бери бездумно. Обычно, приличные экземпляры с большим радиусом действия начинаются от 1 000 рублей. Многие имеют кучу функций, которыми пользоваться будет невозможно. К примеру переключатели режимов есть, а плата режимов полёта и не поддерживает. Из-за этого вес и объём занимают бесполезные переключатели.
Регуляторы оборотов
Они характеризуются по мощности, виткам мотора, внутреннему сопротивлению, наличию реверса, точности работы и куче других страшных параметров. Если есть возможность – ищи комплект двигателей с контроллерами. Если так ты не хочешь, то придётся курить форумы и документацию. В принципе, если согласовать допустимый тип моторов и выдаваемую мощность, то шанс промахнуться минимален, но я этого не говорил. Перепроверь.
Батарея

Необходимая батарея рассчитывается при помощи калькулятора. Он учитывает много параметров, включая вес самого батарейного блока. Дешёвки снова не советую брать. Горит красиво, но слишком быстро. Если коптер – грузовой, и оснащён мощными моторами и прочим навесным оборудованием с высоким потреблением энергии, то не забудь проверить, хватит ли мощности аккумуляторов.
Камера
Ух, вот это самая жесть. Камера не всегда нужна, но если она нужна, то нужно внимательно подойти к её выбору. В качестве записывающей камеры стоит использовать экшн камеры- GoPro или её Китайские аналоги (они не сильно уступают в качестве видео, если даже не превосходят «фирму»). Нужно ориентироваться на вес, и на угол обзора. С весом всё понятно, а вот про угол расскажу.

Хочется, чтобы камера снимала красоты мира, но не снимала лучи коптера. Если ты промахнулся и это произошло, то придётся выбрать из двух плохих вариантов.
Опустить камеру так, чтоб она не задевала пропеллеры. Опускать, скорее всего, придётся сильно, и это вызовет массу проблем с взлётом и посадкой, а также с маневренностью, из-за смещённого центра тяжести.
Вынести камеру вперёд. Тоже беда. Снова сместится центр тяжести (в этом случае можно попытаться уравновесить при помощи АКБ). Ещё сильнее утяжелит конструкцию, ибо придётся придумывать очень мощный фиксатор. Иначе никакими бюджетными виброгасителями делу не поможешь, и эффект желе обеспечен.
Можно попробовать использовать ориентировочную формулу L= 2 * tg (A /2) х D, где:
- L — Область обзора камеры на расстоянии D
- Α — Угол обзора камеры
- D – расстояние до объекта (в нашем случае, до пропеллеров)
Ты получишь диаметр круга, но так как камера снимает прямоугольное изображение, то этот диаметр будет диагональю. Там уж можно примерно прикинуть- задевает, или нет.
Компоненты выбираем, руководствуясь необходимым результатом. Не нужно брать самое лучшее, если в этом нет необходимости. Возможности своей сборки ты можешь приблизительно рассчитать при помощи калькулятора.
Китайские детали
Сразу говорю – в Китае брать можно, но стоит намного серьёзнее подойти к вопросу. Китайцы постоянно завышают характеристики. Так что, нужно примерно понимать, как и что работает, и не вестись на россказни Китайца о небывалых параметрах и чудесном качестве. Короче говоря – можно, но с пониманием дела и на свой страх и риск.
Контроллер
Контроллер, это мозг твоего мультикоптера. Их можно разделить на два вида.

Универсальный: Например, DJI NAZA. Такой контроллер можно использовать с абсолютно любой сборкой. Будь то квадрокоптер, гексакоптер или октокоптер. Он не заточен под управление чем-то конкретным. На него можно подвесить кучу оборудования, он обладает многими функциями и датчиками.
Есть и минусы. Первый минус, это цена. Тот же DJI Naza-M V2 стоит 17 000 рублей. Второй минус- необходимость настройки. Для этого используется специальная программа, написанная под конкретный контроллер. Там можно заменить и отрегулировать практически всё, но это требует определённых сил, знаний и времени.
Специализированный: Как в последующем примере. Он уже заточен под работу с конкретной компоновкой коптера. Конечно, он даёт некоторый простор, но мощность на каждом двигателе вы не настроите. Стоит недорого, умеет мало. Самое то, для начала.
Пошаговая инструкция по сборке
Давайте условимся на том, что ты прочитал нашу статью про выбор набора для сборки квадрокоптера ,и воспользовался ценнейшем советом – брать раму с платой распределения. Если нет, то провода подключаем сразу к модулю управления.

Для примера рассмотрим сборку из следующих комплектующих:
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки
- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления квадрокоптером KK2.1.5 kk21evo
- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Устройство для зарядки аккумуляторов Hobby King Variable6S 50W 5A
- Коннектор для подключения аккумулятора XT60 Male Plug 12AWG 10cm With Wire
- Коннекторы 20 Pairs 3.5mm Bullet Connector Banana Plug For RC Battery / Motor
- Пульт управления квадрокоптером Spektrum DX6 V2 with AR610 Receiver (в комплекте с приёмником и передатчиком)
Примерная цена- 20 000 рублей
Размазываем компоненты по столу ровным слоем, и начинаем.
Этап первый. Сборка

- Примерно прикидываешь необходимую длину проводов контроллера, прибавляешь небольшой запас «на криворукость» и обрезаешь их до нужной длины
- Припаиваешь коннекторы к выходам регуляторов, чтобы потом проще было подключать моторы
- Припаиваешь регуляторы к плате разводки
- Припаиваешь коннектор аккумуляторного блока к плате разводки
- Прикручиваешь двигатели на лучи коптера. При установке моторов постарайся не сорвать резьбу
- Если коннекторов на двигателях нет, то припаиваешь и их
- Привинчиваешь лучи с двигателями к плате
- Крепишь регуляторы к лучам дрона. Не важно чем, но удобнее всего пластиковыми хомутами
- Подключаем провода регуляторов к двигателям в произвольном порядке. Если будет нужно – потом изменим
- Закрепляешь на корпусе модуль управления (предварительно сфотографировав тыльную часть. Пригодится). Снова хоть на жвачку, но советую пока использовать мягкий двухсторонний скотч
- Подключаешь регуляторы оборотов к контроллеру. В те порты, которые отмечены (+ — пусто), обычно подключается белым проводом к экрану
- Остатками скотча закрепляешь приёмник как можно ближе к блоку управления, и подключаешь нужные каналы к нужным портам. Используй документацию своего приёмника и фото тыльной стороны платы, чтобы разобраться какая пачка проводов за что отвечает
- Подключишь питание устройства от батареи, через коннектор
- Profit! Ты собрал свой квадрокоптер
Этап второй. Отладка

- Запускаешь двигатели (тут обычно всё по-разному, так что снова смотри документацию)
- Немного прибавляешь газ, и смотришь в какую сторону вращаются пропеллеры. Они должны вращаться так, как указано в схеме, которая прилагается к контроллеру. Иначе управление будет инвертироваться. Если что-то не так, то просто переворачиваешь коннектор, который соединяет двигатель и контроллер
- Когда всё вращается правильно – прикручиваешь верхнюю деталь рамы. Не заталкивай её на своё место. Если она встаёт туго, значит что-то пошло не так. Ослабь нижние винтики, а после установки затяни всё равномерно
- Закрепляешь блок с аккумуляторами
- Монтируешь адаптеры для пропеллеров на моторы
- Устанавливаешь пропеллеры, учитывая направление вращения моторов. Приподнятая часть лопасти должна смотреть в направлении вращения
- Готово.Твой коптер готов пережить первое включение!
Это был один из простейших примеров, с которого стоит начать. Конечно, если ты хочешь использовать камеру, GPS или более сложный контроллер, то конструкция будет сложнее. Поэтому, если вы не уверены в своих силах, то стоит начать с малого. Всё остальное можно прикрутить потом.
Однако, не стоит переоценивать сложность самоделки. Если нет цели собрать мультикоптер из ПВХ труб на базе ардуино (а такое тоже бывает), то в этом нет ничего, что не смог бы рядовой пользователь. Главное не теряться, читать и спрашивать, если что-то не понятно.
Заключение
Напоследок хочется внести в этот текст немного морали. Любое подобное занятие, будь то проектирование, или просто сборка – является мощнейшим образовательным инструментом. Главное, это просто начать. Ты начнёшь понимать многие тонкости, и научишься концентрировать внимание на важных моментах. Это относится не только к сборке коптеров.
Тебе придётся научиться искать информацию, гуглить, и разбираться в массе вещей. Они тебе не пригодятся в жизни, но ими ты не слабо прокачаешь интеллект. Дерзай, учись, развивайся, и не бойся экспериментировать!
Кстати, расскажи в комментах о том, что ты думаешь об этой теме. Также можешь подписаться на наши группы (кнопки внизу). Тебе не сложно — мне приятно. Удачи, пилот, и да прибудет с тобой подъёмная сила.
(12 оценок, среднее: 4,58 из 5) Загрузка…
drongeek.ru
Гоночный FPV-дрон своими руками (часть 1) — сборка
Сегодня популярность гонок на дронах стремительно растёт. Любительские полетушки перерастают в серьёзные международные соревнования, а количество людей, вовлечённых в это хобби, растёт в прогрессии. Я сам недавно собрал FPV-квадрокоптер 180-го размера (расстояние в мм между осями моторов по диагонали) и спешу поделиться этим опытом.

Полностью процесс сборки и настройки я описал тут и тут, а ниже будет немного изменённая версия, содержащая больше информации из моих предыдущих статей.
Я оставлю за скобками вопрос вхождения в данное хобби и перейду непосредственно к квадрокоптеру.
Выбор размера квадрокоптера
Год назад наибольшей популярностью пользовались квадрокоптеры 250-го размера. Но сейчас пилоты предпочитают собирать аппараты меньшего размера, что весьма разумно: вес меньше, а мощность та же. Я выбрал 180-й размер не из каких-то практических причин, а как некий челлендж по сборке. На самом деле, такой подход к выбору не совсем правилен. Гораздо разумнее выбирать сначала размер пропеллеров, а уже под них — наименьшую раму, куда влезут выбранные пропеллеры. И при таком подходе 180-й формат вообще отбраковывается. Судите сами: 210-й формат позволяет ставить те же 5-дюймовые пропеллеры, что 250-й, при этом сам квадрик получается легче, а 4-дюймовые пропеллеры влезают и в 160-е рамы. Получается, что 180-й размер — это такой промежуточный формат, который «ни нашим, ни вашим». Его также можно считать утяжелённым 160-м. Но, тем не менее я выбрал именно его. Возможно потому, что это минимальный размер, способный более-менее комфортно тягать камеру GoPro или Runcam.
Комплектующие
Начнём с моторов. «Промежуточность» 180-го размера, а также богатство их ассортимента, осложняют выбор. С одной стороны, можно брать то, что идёт на 160-е, с другой — то, что устанавливают на 210-е или даже 250-е. Исходить надо из пропеллеров и батареи (количество банок). Не вижу смысла использовать батарею 3S, а по пропеллерам общие правила таковы:
- нужна максимальная статическая тяга — увеличивай диаметр пропеллера и уменьшай шаг (в разумных пределах)
- нужна высокая скорость — уменьшай диаметр и увеличивай шаг (в разумных пределах)
- нужна высокая тяга при маленьком диаметре — добавляй количество лопастей (опять же в разумных пределах, так как если разница между двух- и трёхлопастными пропеллерами ощутимая, то между трёх- и четырёхлопастными — не такая большая)
В моём случае я имею ограничение размера пропеллеров в 4 дюйма, но не имею ограничения по моторам. Значит, разумнее всего будет использовать трёхлопастные 4045 пропеллеры bullnose. Их сложно балансировать, но с ними управление отзывчевее и предсказуемее, а звук тише. С другой стороны, с двухлопастными пропеллерами скорость у квадрокоптера выше, но мне этого точно не надо. «В народе» на 180-х рамах преобладают следующие сетапы:
- лёгкий с моторами 1306-3100KV, обычными 4045 пропеллерами и батареей 850mAh
- тяжёлый и мощный под трёхлопастные bullnose пропеллеры и экшн-камеру с моторами 2205-2600KV и батареей 1300mAh
На самом же деле, рама позволяет ставить моторы от 1306-4000KV до 22XX-2700KV. Кстати, не знаю почему, но моторы 1806-2300KV сейчас в опале и мало используются.
Для своего квадрика моторы я взял — RCX h3205 2633KV. Во-первых, хотелось иметь запас по мощности (хотя с моими скромными навыками пилотирования, непонятно зачем). Во-вторых, мои сетапы никогда не получались сверхлёгкими, вдобавок я ещё и экшн-камеру таскать планирую. Конкретно моторы RCX — вариант компромиссный. Они дёшевы, но и нареканий по качеству много. На момент покупки комплектующих это были одни из немногих моторов 2205-2600KV на рынке. Сейчас (на момент написания статьи) ассортимент значительно больше и лучше выбрать что-нибудь другое.
С остальными комплектующими действовал по принципу «больше челленджа»:
- Рама RC180 V2. Недорогая (брендовые аналоги в 2-3 раза дороже), лёгкая, с хорошей компановкой и нижней пластиной 3мм. К сожалению, отдельно запчастей к ней не купить, но, учитывая цену всей рамы, вполне можно купить 1-2 комплекта на запчасти.
- Приёмник FrSky D4R-II. Поначалу хотелось попробовать FrSky X4R-SB, но в этом случае пришлось бы менять модуль на передатчике, а этого делать совсем не хотелось. Забегая вперёд скажу, что разумнее брать версию приёмника без припаянных разъёмов. У себя я всё равно их отпаял.
- Регуляторы FVT LittleBee 20A — недорогие и проверенные, но сейчас уже устаревшие. Когда я их покупал только-только появились в продаже FVT LittleBee 20A PRO на чипе Silabs F396 (та версия, что у меня использует чип Silabs F330), а на момент написания статьи уже принимались предзаказы на FVT LittleBee 20A-S, заточенные под BLHeli_S. Здесь можно почитать о технических стороне регуляторов LittleBee 20A.
- Видеопередатчик Foxeer FX799T — компактный, популярный и с микрофоном.
- Камера Sony Super HAD CCD 600TVL (IR Block, NTSC, объектив 2.8). Можно было и Foxeer XAT600M, но мне нужна без корпуса.
- Держатель камеры Diatone.
- Антенна-«клевер» BeeRotor и кабель-удлинитель.
- MICRO MinimOSD.
- В комплекте с рамой уже есть плата распределения питания, но я не хочу её использовать. Поэтому заказал Matek Mini Power Hub, она намного удобнее. Кстати, при использовании батарей 3S, эта PBD издаёт громкий свист и это никак не лечится.
- Несколько батарей Turnigy nano-tech 1300mAh 4S 45~90C.
- Подсветка с пищалкой ZG 12Bit WS2812B LED Board. Позднее выяснилось, что пищалка либо не работает, либо есть какие-то неизвестные (никакой документации не прилагалось) нюансы в подключении. В итоге поставил другую.
- Несколько комплектов пропеллеров DYS 3-blade 4040 Bullnose.
Выбор полётного контроллера
Вы наверное заметили, что в списке нет полётного контроллера. Хочу описать его выбор подробнее. В недорогие наборы для сборки часто включают контроллер CC3D, так сейчас это, пожалуй, самый дешёвый ПК. Сегодня нет совершенно никакого смысла покупать CC3D. Он устарел и не имеет таких необходимых вещей, как контроль заряда батареи и «пищалка». Его преемник CC3D Revolution — это уже совсем иной продукт с богатыми возможностями, но и ценой свыше 40€. Современные полётные контроллеры уже перешли с процессоров F1 на F3, что сделало Naze32 ПК прошлого поколения и ощутимо снизило его цену. Сейчас это поистине народный контроллер, который имеет почти всё, что душа желает при цене от 12€.
Из ПК нового поколения наиболее популярен Seriously Pro Racing F3, причём в первую очередь, из-за наличия недорогих клонов. Сам контроллер ничем не уступает Naze32, вдобавок имеет быстрый процессор F3, большое количество памяти, три UART-порта, встроенный инвертор для S.Bus. Именно SPRacingF3 Acro я и выбрал. Остальные современные ПК не рассматривались из-за цены, либо каких-то специфических особенностей (закрытая прошивка, компоновка и т.д.)
Отдельно отмечу модную ныне тенденцию объединять несколько плат в одну. Чаще всего ПК и OSD или ПК и PDB Я не поддерживаю данную идею за парой исключений. Мне не хочется менять весь полётный контроллер из-за сгоревшей OSD. К тому же, как показывает практика, иногда такое объединение приносит проблемы.
Схема проводки
Понятное дело, что все компоненты, которым нужно питание 5В или 12В, будут получать его от BEC`ов платы распределения питания. Камеру теоретически можно было запитать напрямую от 4S-батареи, благо входное напряжение это позволяет, но ни в коем случае делать этого не стоит. Во-первых, все камеры очень восприимчивы к шумам в цепи от регуляторов, что выразится в помехах на картинке. Во-вторых, регуляторы с активным торможением (такие, как мои LittleBee), при активизации этого торможения, дают в бортовую сеть очень серьёзный импульс, что может сжечь камеру. Причём, наличие импульса напрямую зависит от износа батареи. У новых его нет, а у старых — есть. Вот познавательное видео на тему помех от регуляторов и чем их фильтровать. Так что камеру лучше питать либо от BEC`а, либо от видеопередатчика.
Также, ради улучшения качества картинки, рекомендуется пустить с камеры на OSD не только сигнальный провод, но и «землю». Если скрутить эти провода в «косичку», то «земля» действует, как экран для сигнального провода. Правда в данном случае я этого не делал.
Коли уж зашла речь о «земле», то часто спорят о том, надо ли подключать «землю» от регуляторов к ПК или достаточно одного сигнального провода. На обычном гоночном квадрокоптере однозначно надо подключать. Её отсутствие может привести к срывам синхронизации (подтверждение).
Конечная схема проводки получилась простой и лаконичной, но с парой нюансов:
- питание полётного контроллера (5В) от PDB через выходы для регуляторов
- питание радиоприёмника (5В) от ПК через разъём OI_1
- питание видеопередатчика (12В) от PDB
- питание камеры (5В) от видеопередатчика
- OSD подключил к UART2. Многие используют для этого UART1, но как и на Naze32, здесь этот разъём запараллелен с USB.
- Vbat подключен к ПК, а не к OSD. В теории показания вольтажа батареи (vbat) можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, «пищалкой»), а также передавать эти данные на OSD, в «чёрный ящик» и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.

Сборка
Для начала несколько общих советов по сборке:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
- Крайне желательно после пайки покрыть все платы изолирующим лаком PLASTIK 71, причём в несколько слоёв. По собственному опыту скажу, что наносить жидкий лак кисточной намного удобнее, чем покрывать спреем.
- Не лишним будет капнуть немного термоклея на места пайки проводов к платам. Это защитит пайку от вибраций.
- Для всех резьбовых соединений желательно использовать «Локтайт» средней фиксации (синий).
Сборку я предпочитаю начинать с моторов и регуляторов. Здесь хорошее видео по сборке маленького квадрокоптера, с которого я перенял идею расположения проводов моторов.
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный — двухсторонний скотч + одна-две стяжки. «Дёшево и сердито», к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе — КЗ.

Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется. При сборке рамы не использовал ни одного болтика из комплекта, так как все они неприлично короткие. Вместо этого приобрёл чуть длиннее и с головкой под крестовую отвёртку (есть такое личное предпочтение). Камера не помещалась по ширине между боковых пластин рамы. Немного обработал края её платы надфилем (скорее сточил шероховатости) и она встала без проблем. Но сложности на этом не кончились. Мне очень понравилось качество держателя для камеры от Diatone, но камера с ним не помещалась в раму по высоте (примерно на 8-10мм). Сначала я приколхозил держатель на наружной (верхней) стороне пластины через неопреновый демпфер, но конструкция получилась ненадёжной. Позже пришла идея максимально простого и надёжного крепления. Я взял только хомут от Diatone`овского крепления и одел его на отрезок прута с резьбой М3. Чтобы камера не сместилась вбок, я зафиксировал хомут нейлоновыми муфтами.

Очень понравилось, что из разъёмов на ПК пришлось паять только коннекторы для регуляторов. Полноценные трёхконтактные разъёмы у меня не вписывались по высоте, пришлось пойти на хитрость и использовать двухпиновые. Для первых пяти каналов (4 для регуляторов + 1 «на всякий пожарный») я припаял коннекторы к сигнальной площадке и «земле», для остальных трёх — к «плюсу» и «земле», чтобы можно было запитать сам ПК и уже от него — подсветку. Учитывая, что китайские клоны полётных контроллеров грешат ненадёжной фиксацией разъёма USB, его я пропаял тоже. Ещё одним моментом, характерным для клона SPRacingF3, является разъём «пищалки». Как и в случае с vbat, на верхней стороне платы находится двухконтактный разъём JST-XH, а на нижней — он продублирован контактными площадками. Закавыка в том, что у клона «земля» на разъёмe постоянная и при его использовании «пищалка» всегда будет активирована. Нормальная рабочая для «пищалки» «земля» выведена только на контактную площадку. Это легко проверяется тестером: «плюс» разъёма прозванивается с «плюсом» на контактной площадке, а «минус» — не прозванивается. Следовательно, надо припаять провода для «пищалки» к нижней стороне ПК.

Трёхконтактные разъёмы регуляторов тоже пришлось заменить. Можно было использовать четыре двухконтактных штекера, но вместо этого, я взял два четырёхконтактных штекера и вставил в один «землю» всех регуляторов, во второй (соблюдая порядок подключения моторов) — сигнальный провод.

Пластина с подсветкой по ширине больше, чем рама и выступает по бокам. Единственное место, где её не собьют пропеллеры — под рамой. Пришлось колхозить: взял длинные болты, надел на них нейлоновые муфты с предварительно проделанными прорезями (чтоб стяжки, крепящие подсветку, могли зафиксироваться) и вкрутил через нижнюю пластину в стойки рамы. К получившимся ножкам стяжками притянул пластину со светодиодами (отверстия в пластине подходили идеально) и залил стяжки термоклеем. С задней стороны пластины припаял коннекторы. Уже после сборки, на этапе настройки выяснилось, что с пищалкой что-то не то. Сразу после подключения батареи она начинала монотонно пищать, а если активизировать её с пульта, то на этот монотонный писк накладывался ещё и ритмичный. Я сначала грешил на ПК, но после замера напряжение мультиметром, стало ясно где именно проблема. На самом деле можно было с самого начала подключить к проводам пищалки обычный светодиод. В итоге я заказал сразу несколько пищалок, послушал их и установил самую громкую.


Часто PDB и контроллер крепят к раме нейлоновыми болтами, но я не доверяю их прочности. Поэтому я использовал 20мм металлические болты и нейлоновые муфты. После установки PDB я припаял питание регуляторов (остальные провода были припаяны заранее) и залил места пайки термоклеем. Главный силовой провод, идущий к батарее, я стяжкой закрепил к раме, чтобы его не вырвало в случае аварии.

С приёмника я кусачками удалил все коннекторы, кроме необходимых трёх, а перемычку между третьим и четвёртым каналами пропаял прямо на плате. Как я уже писал выше, разумнее было бы брать приёмник без коннекторов. Также я развернул у него антенны и заплавил в термоусадку. На раме приёмник хорошо поместился между PBD и задней стойкой. При таком расположении хорошо видно его индикаторы и есть доступ к кнопке бинда.

Видеопередатчик стяжками и термоклеем я закрепил к верхней пластине рамы так, чтобы через прорезь был доступ к кнопке переключения каналов и светодиодным индикаторам.

Для крепления антенны видеопередатчика в раме есть специальное отверстие. Но не стоит соединять её с передатчиком напрямую. Получается своего рода рычаг, где одним плечом служит антенна, другим — сам передатчик со всеми проводами, а место крепления разъёма будет точкой опоры, на которую придётся максимум нагрузки. Таким образом, в случае аварии почти со 100% вероятностью разъём на плате передатчика отломается. Поэтому крепить антенну надо через какой-то переходник или удлинитель. К MinimOSD я решил припаять разъёмы, а не провода напрямую. На форумах пишут, что эта плата нередко сгорает, следовательно разумно сразу подготовиться к возможной замене. Я взял планку с коннекторами в два ряда, нижние припаял к контактным площадкам с отверстиями, а на верхние вывел vIn и vOut. После этого залил места пайки термоклеем и упаковал всю плату в термоусадку.

Последним штрихом является наклейка с номером телефона. Она даст хоть небольшую надежду в случае потери квадрокоптера.

Сборка на этом подошла к концу. Получилось компактно и при этом сохранён доступ ко всем необходимым органам управления. Больше фотографий можно посмотреть здесь. Масса квадрокопрера без батареи составляет 330г, с батареей — 470г. И это ещё без экшн-камеры и крепления для неё. В следующей статье я расскажу о прошивке и настройке получившегося квадрокоптера.
Теги:
habr.com
Пошаговые этапы сборки квадрокоптера своими руками

Наверное, не стоит лишний раз говорить о том, насколько популярны сейчас квадрокоптеры. И вы, скорее всего, знаете, сколько они стоят, и уже забросили думать об этом. В нашей статье вы узнаете, как сделать квадрокоптер своими руками в домашних условиях. Сразу предупреждаем, что дело это ответственное и непростое, но по итогу у вас будет бесценный опыт и заветный девайс по смешной цене.
Есть несколько способов собрать квадрокоптер своими силами:
- Комплект «Всё включено». Идеально подходит для тех, кто хочет сэкономить на покупке готового изделия, но также не хочет разбираться во всех нюансах его сборки. Это посылка с деталями, предварительно настроенными производителем. Вам останется лишь прочесть инструкцию и собрать по ней квадрокоптер.
- Комплект «Almost Ready to Fly». «Почти готовый к полёту» стоит дешевле, однако процесс сборки заметно сложнее. Комплект может быть неполным (в соответствии цена-качество), также вам придётся настраивать изделие самим, что сумеет далеко не каждый. Но если вы уже имеете некий опыт в этой сфере – то стоит попробовать.
- Сделать квадрокоптер самим. Подойдёт далеко не всем. Но если у вас есть опыт, пусть и небольшой – дерзайте. К тому же, это станет вашим поводом для гордости – квадрокоптер, созданный собственными руками. Сложность состоит в том, что придётся подобрать, настроить и подогнать самостоятельно.
- Использовать подручные материалы. Не менее сложно, но реально. Детали с aliexpress, подручная электроника — никто не говорил, что будет легко. С другой стороны, всё нужное, включая схемы и чертежи, легко находится в интернете.
 Идеально подходит для тех, кто хочет сэкономить на покупке готового изделия, но также не хочет разбираться во всех нюансах его сборки. Это посылка с деталями, предварительно настроенными производителем. Вам останется лишь прочесть инструкцию и собрать по ней квадрокоптер.
Идеально подходит для тех, кто хочет сэкономить на покупке готового изделия, но также не хочет разбираться во всех нюансах его сборки. Это посылка с деталями, предварительно настроенными производителем. Вам останется лишь прочесть инструкцию и собрать по ней квадрокоптер. «Почти готовый к полёту» стоит дешевле, однако процесс сборки заметно сложнее. Комплект может быть неполным (в соответствии цена-качество), также вам придётся настраивать изделие самим, что сумеет далеко не каждый. Но если вы уже имеете некий опыт в этой сфере – то стоит попробовать.
«Почти готовый к полёту» стоит дешевле, однако процесс сборки заметно сложнее. Комплект может быть неполным (в соответствии цена-качество), также вам придётся настраивать изделие самим, что сумеет далеко не каждый. Но если вы уже имеете некий опыт в этой сфере – то стоит попробовать. Подойдёт далеко не всем. Но если у вас есть опыт, пусть и небольшой – дерзайте. К тому же, это станет вашим поводом для гордости – квадрокоптер, созданный собственными руками. Сложность состоит в том, что придётся подобрать, настроить и подогнать самостоятельно.
Подойдёт далеко не всем. Но если у вас есть опыт, пусть и небольшой – дерзайте. К тому же, это станет вашим поводом для гордости – квадрокоптер, созданный собственными руками. Сложность состоит в том, что придётся подобрать, настроить и подогнать самостоятельно.

Как собрать квадрокоптер своими руками
Предупреждаем, что инструкция обобщена и что могут быть различия в паре моментов. Мы расскажем основное по поводу сборки и выбора деталей.
Какие нужны детали
- Рама и её составляющие. Главное в коптере – несущая часть. Если рама будет легче, то меньше будет уходить питания. Но учтите — лёгкие рамы стоят дороже. Прочность не так важна, если вы не планируете ставить на коптер камеру потяжелее. Рамы бывают трёх типов: четырёхлучевые, шестилучевые и восьмилучевые (по одному мотору на каждый луч).
Особенности выбора комплектующих
- Моторы. Китайские интернет-магазины обычно хитрят и завышают характеристики. Поэтому для надёжности стоит купить моторы мощнее. Также это даст возможность поднимать более тяжёлую камеру. Также существует две разновидности моторов для квадрокоптера — это коллекторные и бесколлекторные
- Пропеллеры. Их цена зависит от цели вашего коптера. Если в ваши планы не входят более сложные «полёты» — пластиковых пропеллеров будет достаточно. Если же планируете аэрофотосъёмку – придётся брать композитные материалы. Чем дороже пропеллеры, тем они крепче и меньше уйдёт времени на балансировку.
- Пульт, приёмник сигнала. Пульт следует брать вместе с приёмником. В таком случае приёмник будет принимать сигнал, посылаемый с пульта. Нормальные пульты, опять-таки, стоят от тысячи рублей и выше – у них радиус действия выше. Сами же пульты могут иметь кучу ненужных переключателей, которые будут вас путать – такие экземпляры лучше не брать.
- Регуляторы оборотов и батарея. Советуем брать сразу комплект двигателей с контроллерами. Можно обойтись и без этого, но тогда настраивать мощность придётся самим. Батарею следует покупать по мощнее, особенно, если хотите ставить более тяжёлую камеру.
- Контроллер. Контроллеры бывают двух типов. Универсальный удобен тем, что работает на дронах любой сборки, этому способствуют датчики и многофункциональность. Недостатком является цена контроллера – от 17 тысяч рублей. Также его придётся настраивать через специальный софт, написанный под конкретную модель. Специализированный контроллер уже имеет необходимые настройки под конкретный тип коптера.
- Камера. Выбор камеры для коптера – дело непростое. Советуем поставить камеру типа GoPro или аналоги от китайских фирм – их качество не сильно разнится. Главную роль играет вес и угол обзора, о последнем расскажем чуть ниже. Чем массивней камера, тем сложнее будет её от центровать. Вы можете рассчитать положение камеры по формуле L= 2 * tg (A /2) х D , (L – область обзора, A – угол, D – расстояние до пропеллеров).



Аналоги камеры GoPro
Экшн-камера Xiaomi Yi

Цена на AliExpress: US $49.99 — 109.99
Технические характеристики:
- Сенсор: CMOS 1/2,3″ 16 мегапикселей;
- Объектив: f/2.8, угол обзора 155 градусов;
- Видео: 1920×1080, 60fps;
- Фото: 4608×3456;
- Вес: 72 грамма;
- Time Lapse: есть;
- Встроенный экран: нет;
- Память: карта памяти microSD.
SJCAM SJ5000X 2K

Цена на AliExpress: $126.58
Технические характеристики:
- Сенсор: CMOS 12 мегапикселей;
- Объектив: f/2.8, угол обзора 170 градусов;
- Видео: 2560×1440, 30fps;
- Фото: 4032×3024;
- Вес: 74 грамма;
- Time Lapse: есть;
- Встроенный экран: есть;
- Память: карта памяти microSD.
О деталях из Китая
Конечно, не стоит недооценивать китайских производителей, но и расхваливать тоже не нужно. Завышенная характеристика их товаров – обычное дело. Брать можно, но только не дешёвые детали, иначе придётся делать всё заново.
Инструкция по сборке
Наверняка, вы прочитали эту статью и взяли раму с платой распределения. Но если вы это не сделали – не беда, просто подключите провода к модулю управления.
Возьмём, к примеру, коптер, собранный из таких комплектующих:
- Основа (каркас) – Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450
- 4 мотора DYS D2822-14 1450KV Brushless Motor.
- Регулятор оборотов DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления 1.5 kk21evo
- АКБ, тип: литий-полимер — Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Зарядное устройство Hobby King Variable6S 50W 5A
- Аккумуляторный коннектор XT60 Male Plug 12AWG 10cm With Wire
- Коннекторы 20 Pairs 3.5мм Bullet Connector Banana Plug For RC Battery / Motor
- Пульт управления Spektrum DX6 V2 with AR610 Receiver (с приёмником и передатчиком)
Всё это обойдётся где-то в 20 тысяч рублей
Этапы сборки квадрокоптера
Раскладываем всё это добро по столу и приступаем.
- Приблизительно прикидываем нужную длину проводов контроллера, добавляем небольшой запас на всякий случай, и обрезаем их до необходимой длины.
- Коннекторы припаиваем к выходам регуляторов для упрощения подключения моторов.
- Припаиваем регуляторы оборотов к плате разводки.
- Припаиваем коннектор АКБ тоже к плате разводки.
- Аккуратно прикручиваем моторы на лучи дрона. При установке бережём резьбу.
- Припаиваем коннекторы двигателей, если их нет.
- Прикручиваем лучи с моторами к плате.
- Крепим регуляторы к лучам коптера. Удобней всего это делать пластмассовыми хомутами.
- Включаем провода регуляторов к движкам в случайном порядке. Если понадобится, потом изменим порядок.
- Закрепляем на корпусе модуль управления (предварительно сфотографировав тыльную сторону, потом поймёте, для чего). Крепим хоть на жвачку, но рекомендую для начала применить мягкую двухстороннюю липкую ленту.
- Подключаем регуляторы оборотов к контроллеру. В порты, отмеченные знаками «плюс»-«минус»-«пусто», как правило, подключаем белым проводом к экрану.
- Оставшейся липкой лентой закрепляем приёмник поближе к блоку управления, и подключаем необходимые каналы к соответствующим портам. Применяем документацию данного приёмника и снимок внешнего края платы, дабы понять, какая стопка проводов за что отвечает.
- Подключаем питание прибора от батареи, сквозь коннектор.
- Вы молодец! Вы собрали свой первый дрон.
Теперь вам осталось его настроить, чтобы он не разбился в первый день полёта.
- Запускаем моторы (здесь по-всякому бывает, штудируйте документацию)
- Добавляем газ и смотрим, в какую сторону крутятся пропеллеры. Они обязаны вертеться так, как написано в схеме, что прилагается к контроллеру. По-другому управление станет инвертироваться. В случае, если что-нибудь пошло не так — переворачиваем коннектор, объединяющий движок и контроллер.
- Если всё вертится верно – прикручиваем верхнюю часть рамы. Не старайтесь втолкать её на место. В случае, если та встала туго — что-то идёт не так. Ослабляем нижние винтики, впоследствии установки затягиваем всё постепенно.
- Закрепляем блок с батареями.
- Монтируем адаптеры для пропеллеров на двигатели.
- Ставим пропеллеры, беря во внимание сторону вращения моторов. Приподнятый элемент лопасти обязан глядеть в сторону вращения.
- Есть! Ваш квадрокоптер готов к первому полёту.
Мы с вами рассмотрели простой пример сборки квадрокоптера, который не требует больших затрат и усилий в плане сборки. Соответственно, если вы решите поднимать на дроне что-нибудь потяжелее (навигатор, более тяжёлые средства съёмки и т.п.) – конструкцию придётся доработать и усилить. Тем не менее, вы уже получили первый опыт сборки подобных конструкций. Дальше вам будет проще понимать принцип работы коптера и знать, как его в дальнейшем доработать.
kiborg.pro
Как сделать дрон своими руками в домашних условиях?
Тема изготовления устройств и гаджетов своими руками невероятно актуальна среди любителей летательных аппаратов. Популярные модели дронов зачастую дорогие и предназначены строго для определенных целей. Изготовление дрона своими руками в домашних условиях позволит пилоту не только получить порцию удовольствия от процесса сборки, но и сконструировать аппарат под себя и свои нужды. Также после завершения сборки вы будете отлично разбираться в конструкции летательных аппаратов что в наше время очень ценное умение.
Что лучше купить или сделать дрон своими руками?
Ответ на этот вопрос для каждого будет индивидуальным, есть много нюансов которые нужно учесть перед изготовлением дрона своими руками в домашних условиях.
Финансы
Экономия – главный аргумент в изготовлении самодельного дрона своими руками. Но это не совсем так, покупая нужные компоненты в интернет магазине конечная цена не будет сильно отличатся от собранного дрона. В лучшем случае что получится сэкономить это процентов 10. Другой вопрос когда человек сделает дрон в домашних условиях из подручных средств, некоторые детали также можно позаимствовать из других дронов. Например вместо карбонового каркаса использовать деревянный или из сантехничных труб.
Время
Самодельный дрон дело отнимающее много времени и сил, это стоит учесть перед осуществлённыем задуманного. Во первых нужно подобрать нужные запчасти, потом изучить техническую часть, собрать дрон, настроить и протестировать. Также не стоит забывать что с первого раза редко у кого получается сделать правильно.
Как сделать самодельный дрон из подручных средств?
Из подручных средств получится сделать разве что раму на которой крепится вся электроника. Также можно позаимствовать с не нужных устройств провода. Все остальное в любом случае придется покупать ну или позаимствовать с другого сломанного дрона.
Рама
На самом деле раму дрона можно сделать из любого материала, главное чтобы он был жесткий и легкий. Для этого отлично подойдут алюминиевые или сантехничные пластмассовые трубы, пустое пространство внутри пригодится для прокладки проводки. Некоторые умельцы делают раму из дерева, что очень дешево и весьма надежно. На это он и самодельный дрон из подручных средств чтобы использовать все что под рукой.

Если хотите качественную и прочную конструкцию, советуем все таки не экономить и купить карбоновую раму, которая держит удар и не разлетится после первого удара
Электромотор
Выбор двигателя для изготовления дрона сложный процесс, который требует большое количество прочитанной литературы на данную тему. Основные характеристики моторов на которые стоит смотреть при выборе:
- А – потребляемый ток мотора
- Kv – обороты на вольт
Если с первым пунктом все понятно, то со вторым следует разобраться подробней. Kv показывает количество оборотов на 1 вольт. Формула для подсчета RPM=Kv*U, где U напряжение аккумулятора.

Движок с большим KV ставят на маленькие быстро вращающиеся пропеллеры, например гоночные квадрокоптеры, а движок с маленьким KV — ставят на больше дроны с большими пропеллерами.
Пропеллеры
Пропеллеры самодельного дрона нужно выбирать исходя из уже сделанного выбора моторов, если выбрать слишком маленький, мотор не сможет использовать полную мощность, а если выбрать больше чем нужно, мотор перегрузится и сломается. Существуют специальные онлайн калькуляторы для расчета размера пропеллеров.

Аккумулятор
При сборке дрона своими руками в домашних условиях аккумулятор один из важнейших компонентов, к выбору которого нужно отнестись со всей ответственностью. Важные характеристики при выборе аккумулятора:
От емкости аккумулятора зависит полетное время самодельного дрона. Чем больше емкость, тем соответственно больше его вес и габариты. Покупать самый мощный по емкости аккумулятор нельзя, так как его вес будет мешать не только маневренности, но и полетному времени несмотря на большую емкость.
Токоотдача написана на корпусе аккумулятора в виде цифры стоящей перед буквой С. Умножаем емкость на токоотдачу и получаем цифру которая информирует нас, каким максимальным током можно разряжать аккумулятор.

Для примера у нас есть аккумулятор с номинальной емкость 6000 mAh и токоотдачей 10С, с помощью простой математики получаем 6000 * 10 = 60000 mAh или 60 A. Подсчитав максимальный потребляемой ток всей системы, вы сможете подобрать подходящий по мощности аккумулятор для самодельного дрона.
Полётный контроллер
Для выбора полетного контроллера определитесь какой дрон вы будете собирать. Это будет гоночный, грузовой или квадрокоптер для фотосъёмки? После смотрите на программное обеспечение которое вам пригодится и под него подбирайте контроллер поддерживающий ПО.

Comments
comments
hitechlabs.ru
Самодельный дрон в домашних условиях
Квадрокоптер — это не только весело и интересно. Такое устройство можно использовать для аэрофотографии, доставки небольших грузов, выполнения задач патрулирования, участия в соревнованиях. Именно для последней цели множество профессионалов предпочитает покупать не готовые модели, а собирать квадрокоптер своими руками. Сделать это можно и в домашних условиях. Главное — правильно подобрать комплектующие.
С чего начинать
Первое, что стоит уяснить начинающему, который решил сделать квадрокоптер своими руками: обойтись без покупки специальных комплектующих не получится. Летающая четырехвинтовая машина представляет собой достаточно сложную компьютеризированную систему. Поэтому приобретение специальной управляющей платы, сигналы с которой будут стабилизировать и направлять мультикоптер — является обязательным.

Несколько советов помогут собрать дрон с высокими шансами на положительный результат.
И главное — не стоит сразу пытаться делать квадрокоптер с камерой. Это устройство (если хочется получать качественное изображение) не только громоздкое и довольно тяжелое, но и неизбежно разбалансирует дрон.
Готовые комплекты
Профессиональные спортсмены, использующие гоночные дроны, предпочитают покупать готовые наборы для сборки. Это так называемые комплекты ARF. В них входит минимальный набор компонентов, чтобы сделать дрон своими руками с предсказуемыми характеристиками. При этом владельцу предлагается некоторая свобода в модификации параметров изделия путем замены лопастей, батарей и других комплектующих.

Наборы ARF обычно включают:
После того, как самодельный квадрокоптер собран, на него устанавливают систему управления. Ее можно купить отдельно.
Еще одно достоинство комплектов ARF — широкие возможности модификации летных характеристик дрона. Можно собрать квадрокоптер с большим радиусом действия, подключая его к соответствующей системе управления. Или обеспечить хорошие характеристики маневренности, используя специальные пульты.
Сборка в домашних условиях
Квадрокоптер можно собрать самому, в домашних условиях. Без покупки сложных электронных компонентов обойтись не получится. А вот силовую раму с ногами двигателей можно сделать из подручных материалов. Есть несколько вариантов сборки. Раму можно сделать из пластиковых труб водопроводной сети или собрать конструкцию из тонкого алюминиевого профиля квадратного сечения.



Самый простой способ — выполнить раму из фанеры. Для этого потребуется квадрат, размеры которого подбираются под габариты будущего коптера. К основанию рамы из фанеры будут крепиться ноги двигателей. Это может быть как готовое изделие промышленного производства, так и вручную изготовленные детали. Пошаговая сборка силовой рамы выглядит следующим образом.
Сделать всю работу самостоятельно получится только у людей с высоким уровнем навыка моделирования и использования ручных инструментов. Требуется максимальная точность и минимальное количество материала.

Двигатели
Рекомендуется приобретать для сборки коптера в домашних условиях готовый комплект двигателей с системой управления. Это избавит от возможных отклонений в оборотах и других сложностях балансировки. Если же хочется все собрать самому, включая систему подъемных двигателей, следует ориентироваться на:

Далее делается выбор двигателя по его маркировке. Производитель всегда указывает диаметр статора и высоту двигателя. К каждому изделию приводится тип и размер лопастей, рекомендуемых к применению. После этого, основываясь на массе беспилотника и оборотах двигателя при зависании (указывается в паспорте) — подбирается конкретная марка пропеллера.
Выбор лопастей
Лопасти — одна из простых деталей, которым мало уделяют внимания начинающие. От конструкции данного элемента зависят летные характеристики дрона в целом. Рекомендации по выбору лопастей следующие.

Второй главный фактор выбора лопастей — материал, из которого они изготовлены. Для начинающих, при сборке первых моделей, можно купить пластиковые пропеллеры. Но стоит помнить, что они не отличаются прочностью. Пластик деформируется, высыхает (меняет жесткость). Кроме этого, в ходе эксплуатации лопасти повреждаются пылью и другими взвесями в воздухе, из-за чего растет их аэродинамическое сопротивление.

Металлические пропеллеры — оптимальный выбор, если хочется получить долговечный дрон со стабильными характеристиками. Стоят такие изделия дороже пластика, но служат гораздо дольше, показывая стабильные характеристики. Стоит помнить, что металлические пропеллеры неизбежно потребуют двигатели большей мощности для своего вращения.

Третий тип материалов, используемых для изготовления лопастей — композитные полимеры, многослойная конструкция. Такие пропеллеры легкие и прочные. Их цена высока, однако в области спортивных дронов композитные материалы лопастей не имеют конкурентов.
Важно! Если сборка квадрокоптера в домашних условиях планируется впервые, то при покупке лопастей не стоит экономить. Нужно внимательно изучать приводимую производителем разницу в массах отдельных пропеллеров в комплекте. На практике, покупая набор лопастных блоков дороже всего на 10% от средней цены, можно избавиться от работ по балансировке системы.

Система управления
Система управления, рекомендованная к покупке для начинающих, состоит из пульта и приемника, устанавливаемого на коптере. Сегодня на рынке представлено великое множество комплектов, предлагающих разный функционал. Например, может быть реализована:

От класса решения напрямую зависит стоимость системы управления. Поэтому рекомендуется тщательно проанализировать сферу применения и задачи коптера перед выбором того или иного комплекта его электроники.
Алгоритм сборки
Сборка квадрокоптера не представляет большой сложности.

Завершается сборка тщательным изолированием мест соединения проводов термоусадкой. При необходимости защиты плат управления от влаги, они накрываются кожухами. После этого можно присоединять аккумулятор и тестировать коптер в работе.


В качестве заключения
Если не экономить на покупке комплектующих, собрать самодельный дрон не составит труда. Достаточно действовать аккуратно, в соответствии с инструкциями производителя тех или иных компонентов. Как правило, после первой удачно собранной модели у начинающих появляются амбиции и желание собрать дрон с улучшенным функционалом. Чтобы минимизировать траты, следует предусмотреть такой вариант заранее. Например, купить плату управления, поддерживающую прямое подключение камеры или передачу сигнала на смартфон по протоколу Wi-Fi.
Самые популярные квадрокоптеры
Квадрокоптер DJI Mavic Air на Яндекс Маркете
Квадрокоптер DJI Mavic Air Fly More Combo на Яндекс Маркете
Квадрокоптер DJI Mavic 2 Pro на Яндекс Маркете
Квадрокоптер DJI Mavic 2 Zoom на Яндекс Маркете
Квадрокоптер DJI Spark Fly More Combo на Яндекс Маркете
Источник
Дрон своими руками: Урок 2. Рамы.
Содержание
Введение
Итак, перед тем как приступить к сборке дрона, первым делом необходимо выбрать раму. Вы можете исполнить её самостоятельно, либо использовать уже готовые решения (UAV frame kit). Как вы уже смогли заметить, что для создания мультироторных БЛА можно использовать различные типы рам и конфигурации. Поэтому в этом разделе мы рассмотрим распространённые или основные типы рам, материалы исполнения, а также вопросы касающиеся проектирования.
Типы рам БПЛА
Трикоптер

Квадрокоптер

Гексакоптер


Октокоптер


Размер БПЛА
Беспилотники бывают разных размеров, от «Нано», которые меньше ладони, до крупногабаритных, которые можно перевозить только в кузове грузовика. Для большинства пользователей, которые только начинают познавать беспилотное хобби, оптимальный диапазон размеров, предлагающих наибольшую универсальность и ценность, находится в пределах от 350мм до 700мм. Размером рамы является диаметр наибольшего круга пересекающего каждый из моторов. Запчасти для БПЛА таких размеров имеют широкий спектр цен и самый большой выбор доступных продуктов.

Материалы исполнения БПЛА/Конструкция
Ниже приведены наиболее распространенные материалы исполнения используемые для изготовления рам мультироторных дронов, соответственно список не полный. В идеале рама должна быть жёсткой с минимально возможной передачей вибрации.
Поролон (Пена) — как единственный материал для изготовления рам БЛА используется редко, и, как правило, в комбинации с жёстким каркасом или усиленной конструкцией. Также может применяется в стратегических целях; в качестве защиты несущих винтов (пропеллеров), шасси, не редко выступает в качестве демпфера. Поролон может быть разных типов от мягкого до относительно жёсткого.

Дерево — если в приоритете дешевизна конструкции, то дерево — это отличный вариант, который значительно сократит время сборки и изготовления запасных частей. Древесина достаточно тверда и является проверенным временем материалом. Важно чтобы при изготовлении рамы использовалась идеально прямая древесина (без изгибов и деформации).

Пластик — для большинства пользователей доступен только в виде пластиковых листов. Имеет тенденцию к изгибу и как таковой не идеален. Отлично подходит для изготовления защитного каркаса или шасси. Если вы рассматриваете возможность 3D печати, следует учитывать временной интервал изготовления (возможно проще купить комплект дооснащения UAV frame kit). 3D печать деталей отлично себя зарекомендовала при создании небольших квадрокоптеров.

Алюминий — доходит до потребителя в различных формах и размерах. Вы можете использовать листовой алюминий для исполнения корпуса, либо экструдированный алюминий для реализации лучей дрона. Алюминий не такой лёгкий, по сравнению с углеродным волокном или G10, зато цена и долговечность выступают главными преимуществами материала. Вместо разрушения или трещин, алюминий имеет склонность к изгибу. Для работы с материалом требуется только пила и дрель.

G10 (разновидность стекловолокна) — не смотря на то, что внешний вид и основные свойства практически идентичны с карбоном (углеродным волокном), является менее дорогим материалом. В основном доступен в листовом формате и используется для реализации верхних и нижних пластин рамы. Также в отличии от углеродного волокна, G10 не блокирует радиочастотные волны.

PCB (Печатная плата – пластина из диэлектрика) — по сути аналог стекловолокна, но в отличии от последнего всегда плоские. Иногда используется в качестве верхних и нижних пластин рамы, с целью уменьшения количества используемых деталей (например, плата распределения питания часто встроена в нижнюю панель). Рамы нано/мини квадрокоптеров могут быть исполнены из одной печатной платы включающей в себя всю электронную начинку.

Углеродное волокно — самый востребованный материал из-за лёгкого веса и высокой прочности. Процесс изготовления по прежнему исключительно ручной. Как правило серийно производятся простые формы, такие как плоские листы, трубчатые комплектующие; исполнение сложных трехмерных форм осуществляется на заказ.

Дополнительные соображения



Общие рекомендации по монтажу:

Методические рекомендации
Шаг 1: Посмотрите, какие материалы и инструменты для их обработки имеются в вашем распоряжении.
Шаг 2: Перечислите все дополнительные (вспомогательные) части, которые вы планируете включить в сборку.
Шаг 3: Поразмышляйте о предполагаемых размерах рамы.
Шаг 4: Спроектируйте, соберите и протестируйте раму.
Теперь у вас есть рама и вы можете переходить к следующему уроку.
Источник
Квадрокоптер своими руками — пошаговая инструкция по сборке
Привет! Сегодня на повестке дня у нас очень интересная тема. Думаю, ты уже задумывался о том, что можно собрать квадрокоптер своими руками. Идея и правда интересная. Выбирая этот, не самый простой путь, ты не только получишь хороший дрон, но и сможешь понять его устройство, и получишь много полезных знаний. А часть этих знаний ты впитаешь уже сегодня. Поехали!
Варианты
Перед началом стоит вспомнить – а какие же есть способы получить свой квадрокоптер? На самом деле их пять.
RTF (ready to fly) – Просто купить готовый коптер. Тебе останется его просто достать из коробки и запустить в полёт. Это хороший вариант, если тебе не интересны эти конструкторы, и ты хочешь просто удовлетворить свою потребность в БПЛА. Однако, это далеко не так весело, как оставшиеся варианты.
Комплект «всё включено»
Такой комплект подойдёт тем, кто хочет сделать дрон своими руками, но не собирается часами разбираться в документациях, калькуляторах и прочих тонкостях. Там всё так-же рассчитано производителем и подогнано. Нужно только собрать и настроить. Если ты сейчас выбираешь свой первый квадрокоптер, то это определённо твой выбор.
Комплект ARF
ARF (Almost Ready to Fly) – Тут всё слегка сложнее. Бывают разные степени «готовности». Где-то нужно докупить контроллер, а где-то в комплекте идёт только рама коптера. Собрать квадрокоптер, настроить и откалибровать придётся самому. Вариант для тех, кто хочет углубиться в тему и поковыряться в своём БПЛА.
С нуля
Это выбор продвинутых юзеров. Строить коптер с нуля — значит самостоятельно подбирать оптимальные компоненты, разрабатывать и изготавливать раму и так далее. Это сложный, но очень интересный путь, особенно, если не брать готовый модуль управления, а попытаться использовать Arduino или raspberry pi.
Из подручных материалов
Мы не ищем лёгких путей. Дедушкин гараж, алиэкспресс и помойка электроники – наш выбор. Путь боли, ПВХ труб и хардкора, но в результате ты получишь полностью самодельный квадрокоптер. Тут полный простор для фантазии, а все необходимые комплектующие и чертежи квадрокоптеров можно найти в интернете.
Инструкция по сборке квадрокоптера своими руками (для начинающих)
А теперь давай разберёмся с тем, как собрать квадрокоптер мечты. Сразу скажу, что это обобщённый гайд, и некоторые моменты могут отличаться. Я попытаюсь систематизировать процесс, и указать на основные моменты выбора и сборки.
Детали для сборки квадрокоптера.
Сборка квадрокоптера своими руками начинается с выбора компонентов. Это самый ответственный этап.
Комплектующие рамы
Несущая конструкция коптера крайне важна. От её характеристик зависит то, сколько лишней мощности у вас останется. Чем легче рама, тем она дороже. На счёт прочности особо напрягаться не стоит, если в ваши планы не входит постройка квадрокоптера для массивных камер. Есть три основных типа рамы – четырёхлучевая, шестилучевая и восьмилучевая. В данном случае мы будем отталкиваться от четырёхлучевой компоновки с одинарными двигателями (один движок на луч).
Также рама может быть оснащена складными лучами, но это уже очень дорого, и не очень нужно. Можно попробовать реализовать это самостоятельно.
Особенности при выборе компонентов
Моторы
Пропеллеры
Это тема достаточно объёмная. При выборе винтов нужно ориентироваться на свои потребности. Если это будет простенький коптер для «полетать», то можно смело брать пластиковые. Если же вы хотите настоящий рабочий агрегат для аэрофотосъёмки, или спортивный мини дрон (что не парадоксально, ибо там каждый грамм на счету) то желательно использовать композитные материалы. Ну и не жадничай. Переплата в 10 процентов может избавить от необходимости балансировки.
Пульт и приёмник
Для начала, грамотным решением будет взять пульт, у которого в комплекте есть приёмник. Тогда они будут уже спарены, и тебе останется только присоединить приёмник к управляющей плате. Пульт тоже не бери бездумно. Обычно, приличные экземпляры с большим радиусом действия начинаются от 1 000 рублей. Многие имеют кучу функций, которыми пользоваться будет невозможно. К примеру переключатели режимов есть, а плата режимов полёта и не поддерживает. Из-за этого вес и объём занимают бесполезные переключатели.
Регуляторы оборотов
Они характеризуются по мощности, виткам мотора, внутреннему сопротивлению, наличию реверса, точности работы и куче других страшных параметров. Если есть возможность – ищи комплект двигателей с контроллерами. Если так ты не хочешь, то придётся курить форумы и документацию. В принципе, если согласовать допустимый тип моторов и выдаваемую мощность, то шанс промахнуться минимален, но я этого не говорил. Перепроверь.
Батарея
Необходимая батарея рассчитывается при помощи калькулятора. Он учитывает много параметров, включая вес самого батарейного блока. Дешёвки снова не советую брать. Горит красиво, но слишком быстро. Если коптер – грузовой, и оснащён мощными моторами и прочим навесным оборудованием с высоким потреблением энергии, то не забудь проверить, хватит ли мощности аккумуляторов.
Камера
Ух, вот это самая жесть. Камера не всегда нужна, но если она нужна, то нужно внимательно подойти к её выбору. В качестве записывающей камеры стоит использовать экшн камеры- GoPro или её Китайские аналоги (они не сильно уступают в качестве видео, если даже не превосходят «фирму»). Нужно ориентироваться на вес, и на угол обзора. С весом всё понятно, а вот про угол расскажу.
Хочется, чтобы камера снимала красоты мира, но не снимала лучи коптера. Если ты промахнулся и это произошло, то придётся выбрать из двух плохих вариантов.
Опустить камеру так, чтоб она не задевала пропеллеры. Опускать, скорее всего, придётся сильно, и это вызовет массу проблем с взлётом и посадкой, а также с маневренностью, из-за смещённого центра тяжести.
Вынести камеру вперёд. Тоже беда. Снова сместится центр тяжести (в этом случае можно попытаться уравновесить при помощи АКБ). Ещё сильнее утяжелит конструкцию, ибо придётся придумывать очень мощный фиксатор. Иначе никакими бюджетными виброгасителями делу не поможешь, и эффект желе обеспечен.
Можно попробовать использовать ориентировочную формулу L= 2 * tg (A /2) х D, где:
Ты получишь диаметр круга, но так как камера снимает прямоугольное изображение, то этот диаметр будет диагональю. Там уж можно примерно прикинуть- задевает, или нет.
Компоненты выбираем, руководствуясь необходимым результатом. Не нужно брать самое лучшее, если в этом нет необходимости. Возможности своей сборки ты можешь приблизительно рассчитать при помощи калькулятора.
Китайские детали
Сразу говорю – в Китае брать можно, но стоит намного серьёзнее подойти к вопросу. Китайцы постоянно завышают характеристики. Так что, нужно примерно понимать, как и что работает, и не вестись на россказни Китайца о небывалых параметрах и чудесном качестве. Короче говоря – можно, но с пониманием дела и на свой страх и риск.
Контроллер
Контроллер, это мозг твоего мультикоптера. Их можно разделить на два вида.
Универсальный: Например, DJI NAZA. Такой контроллер можно использовать с абсолютно любой сборкой. Будь то квадрокоптер, гексакоптер или октокоптер. Он не заточен под управление чем-то конкретным. На него можно подвесить кучу оборудования, он обладает многими функциями и датчиками.
Есть и минусы. Первый минус, это цена. Тот же DJI Naza-M V2 стоит 17 000 рублей. Второй минус- необходимость настройки. Для этого используется специальная программа, написанная под конкретный контроллер. Там можно заменить и отрегулировать практически всё, но это требует определённых сил, знаний и времени.
Специализированный: Как в последующем примере. Он уже заточен под работу с конкретной компоновкой коптера. Конечно, он даёт некоторый простор, но мощность на каждом двигателе вы не настроите. Стоит недорого, умеет мало. Самое то, для начала.
Пошаговая инструкция по сборке
Для примера рассмотрим сборку из следующих комплектующих:
Размазываем компоненты по столу ровным слоем, и начинаем.
Этап первый. Сборка
Этап второй. Отладка
Это был один из простейших примеров, с которого стоит начать. Конечно, если ты хочешь использовать камеру, GPS или более сложный контроллер, то конструкция будет сложнее. Поэтому, если вы не уверены в своих силах, то стоит начать с малого. Всё остальное можно прикрутить потом.
Однако, не стоит переоценивать сложность самоделки. Если нет цели собрать мультикоптер из ПВХ труб на базе ардуино (а такое тоже бывает), то в этом нет ничего, что не смог бы рядовой пользователь. Главное не теряться, читать и спрашивать, если что-то не понятно.
Заключение
Напоследок хочется внести в этот текст немного морали. Любое подобное занятие, будь то проектирование, или просто сборка – является мощнейшим образовательным инструментом. Главное, это просто начать. Ты начнёшь понимать многие тонкости, и научишься концентрировать внимание на важных моментах. Это относится не только к сборке коптеров.
Тебе придётся научиться искать информацию, гуглить, и разбираться в массе вещей. Они тебе не пригодятся в жизни, но ими ты не слабо прокачаешь интеллект. Дерзай, учись, развивайся, и не бойся экспериментировать!
Кстати, расскажи в комментах о том, что ты думаешь об этой теме. Также можешь подписаться на наши группы (кнопки внизу). Тебе не сложно — мне приятно. Удачи, пилот, и да прибудет с тобой подъёмная сила.
Источник