Радиоуправляемый катер для рыбалки — это настоящая находка, которую может соорудить любой мастер собственными руками. С его помощью осуществляется завоз прикормки на дальние расстояния. Купить такое изделие можно в специализированном магазине, но уже после нескольких походов на рыбалку оно сломается. Естественно, есть очень качественные модели, но их стоимость тоже впечатляет. Лучше соорудить катер на радиоуправлении самостоятельно, так можно быть уверенным в его исправности, да и запчастей понадобится немного.
Нельзя сказать, что собрать такое небольшое судно очень уж просто. Но если соблюдать инструкцию, то для изготовления самоделки понадобится всего день.
Для начала следует собрать необходимый материал и инструмент:
- стеклопластик, фанера или другой материал, из которого можно будет вырезать корпус кораблика;
- силовой каркас из алюминиевого профиля;
- горячий клей (или другое средство для фиксации частей, которое будет устойчивым к воздействию воды);
- монтажная пена;
- двигатель;
- регуляторы;
- аппаратура для осуществления управления корабликом;
- аккумулятор, благодаря которому будет работать моторчик;
- провода и разъемы для подключения и соединения всех компонентов схемы;
- паяльник;
- дейдвудная труба;
- вал с винтом, благодаря которому будет осуществляться передвижение катера;
- ножовка или электролобзик.
Конструкция аппарата может быть абсолютно любой. Главное, чтобы она была действенной. Для этого важно правильно рассчитать водоизмещение этого маленького судна.
Вообще, такая небольшая лодка считается настоящей находкой, ведь рыбаку не придется думать, как доставить прикормку на большое расстояние. Кроме того, к ней можно прикрепить эхолот и обследовать водоем в поисках наиболее рыбного места.
Радиоуправляемый кораблик для рыбалки своими руками сделать нетрудно, нужно просто соблюдать последовательность выполнения работ:
- Изготовление корпуса. Если используется фанера, то дополнительно придется облицевать ее стеклотканью и обмазать эпоксидной смолой. Это поможет защитить материал от гниения. Вырезать фанеру или стеклопластик необходимо по предварительно нарисованной или скачанной схеме. Для того чтобы герметизировать все швы, необходима монтажная пена.
- Установка силового каркаса. Благодаря ему нагрузка на корпус распределяется равномерно, и он остается на плаву. Нос кораблика можно заполнить пеной, которая гарантирует его непотопляемость.
- Монтаж трубы с винтом. Лопасти движущего компонента остаются внутри корпуса, поэтому они не запутаются в водорослях, не поранят рыбу, а также не зацепятся за корягу. Отверстие трубы дополнительно нужно закрыть решеткой.
- Обустройство электронной части. Вот теперь устанавливается двигатель, дейдвудная труба, вал с муфтой и гребной винт. Чтобы рыболовный катер мог плыть в заданном направлении и поворачиваться, нужно оснастить его регуляторами.
- Монтаж серводвигателей для открывания емкостей с прикормкой. Они должны находиться в корпусах, внутрь которых не попадает пыль и влага.
- Установка аккумуляторов.
Для управления изделием лучше выбрать пятиканальную радиосистему, которая устанавливается на игрушки.

Как видно, кораблик для рыбалки своими руками делается быстро.
Кроме того, есть другие полезные рекомендации, которые помогут не только самостоятельно сконструировать изделие, но и сделать его долговечным:
- лучше выбрать не фанеру, а стеклопластик, ведь он гораздо легче и не требует дополнительной защиты от влаги, так как не поддается ее негативному воздействию (этот материал также отличается высокой прочностью);
- выбранный аккумулятор должен обладать достаточной емкостью, чтобы катер не заглох посреди водоема, но также важно обратить внимание и на вес компонента (он не должен слишком сильно утяжелять конструкцию);
- катер можно дополнительно оснастить подсветкой, навигатором — это даст возможность осуществлять ночную ловлю;
- для того чтобы изделие не ушло под воду, необходимо правильно рассчитать водоизмещение, которое колеблется в пределах 2,5-12 литров (тут влияет расстояние, на которое уплывает судно, количество подкормки, масса необходимого оборудования).
Ловля рыбы при помощи радиоуправляемого катера — настоящее удовольствие. Но чтобы кораблик уплывал на дальние расстояния, система управления должна быть рассчитана на это. Радиус ее действия не должен быть меньше 50 м.
Мое увлечение радиоуправляемыми моделями началось с постройки катера на радиоуправлении. Многим моделистам известен такой журнал как «Моделист конструктор». В одном из номеров за 198Х какой-то год я прочитал статью про спортивный катер и тоже захотел построить такой же. На страницах были приведены в масштабе необходимые чертежи. Вот что из этого получилось.
В связи с тем, что те годы прошлого столетия были достаточно тяжелые и для модели трудно было найти нужные детали, то все строилось из подручных материалов. Регуляторов и моторов вообще не было. Но буду последовательно вести рассказ.
В кружки и дом пионеров я не ходил, мастерил потихоньку дома. Про стеклоткань конечно слышал, но родители сказали это вредно и больше не обсуждается. Поэтому перевел все чертежи на толстый картон, нарезал на пенорезке кубиками пенопласт. Собрал шпангоуты вместе с пенопластом и прошелся пенорезкой.
Пенорезка была самодельная, между двух опор натянул нихромовую тоненькую проволоку, через которую пропускал ток от мощного 12 вольтового блока питания.
Далее все оклеил плотным картоном. Пропитал все лаком, предварительно открытые участки пенопласта покрыл ПВА, чтобы пенопласт не растворился. Шпангоут, где предполагался двигатель, сделал из стеклотекстолита. Корпус получился очень легким и достаточно прочным. Длина модели 800 мм, ширина 240 мм.
В качестве дейдвуда использовал алюминиевую трубку диаметром 10 мм, в которую после некоторых доработок напильником встали подшипники. В верхней части сделал масленку с пробкой под винт. В качестве вала использовал металлический пруток, на который нанес резьбу М4. В дейдвуд шприцем залил густое масло, от отцовской машины.

Киль сделал сам, к стержню припаял кусочек фольгированного стеклотекстолита. Также установил два подшипника для легкости хода.

На день рождения родители подарили первую серьезную двухканальную аппаратуру пистолетного типа Acoms на 27MHz с встроенным BEC-ом и двумя стандартными сервоприводами.
Мотор был первоначально установлен низкооборотистый на 12v, его характеристики мне были не известны, но крутящий момент был не маленький.
Лючки сделал быстросъемными, с одной стороны задвигаются, а с другой — на винтовых соединениях.

Регулятор с реверсом сделал сам примитивно просто. Взял тумблер от старого прибора на три положения. Разобрал, ослабил пружину, просверлил в ручке отверстие и присоединил тягу от сервопривода. Настроил в аппаратуре расходы. Работает как часы, чистая механика. Конечно, можно поспорить относительно данного решения, но напомню, что это делалось много лет назад.
В качестве винта использовал самодельный из гнутого металла, но спустя некоторое время мне удалось купить винт из латуни, результат ошеломил. Диаметр винта 40 мм.
Переделок много не последовало, нужно было только состыковать валы. С этой задачей позволил справиться гибкий соединитель, до этого были и шестеренки, чтобы повысить обороты, и карданная передача.
Аккумулятор использовал от машинки NiMh 7,2 3000mAh.
Но радость от скоростных заплывов была недолгой. Вдалеке от берега из катера пошел дым.
Уже на берегу осмотр показал, что горят провода и сильно греется мотор. Такого я еще не видел ни разу.
Взамен поставил толстенные провода в силиконе, плюс ко всему решил сделать систему водяного охлаждения. Купил медную трубку в автомагазине от тормозной магистрали. Плотно накрутил на двигатель. В транце сделал ввод и вывод. На киль припаял кусочек трубки. Соединил все резиновой трубкой из того же автомагазина. Тесты в ванной показали работоспособность системы, вода нагнетается в систему охлаждения от гребного винта.

На высокой скорости стало заплескивать воду в катер, пришлось все лючки перед заплывами заклеивать липкой лентой. При смене аккумуляторов ленту приходится переклеивать на борт для повторного использования, поэтому появляются пятна от частичек клея липкой ленты. Периодически приходится чистить корпус лодки.
Каждым летом рассекаю по водным просторам.



С момента постройки и по сей день катер существует, изменений в конструкцию не вносил. Одним словом, радует глаз и навевает приятные воспоминания о проведенном времени.
Радиоуправляемый катер своими руками на Ардуино сделать очень просто — это идеальный проект для начинающих. Подробно рассмотрим технологию изготовления корпуса катера, представим электрическую схему подключения моторов и блютуз модуля к Arduino UNO. Смотрите также видео ролик, где продемонстрирована возможность использования катеров на Ардуино для соревнований «Морской бой».
Видео. Радиоуправляемые катера на Ардуино
Катер собран на Ардуино UNO, но можно использовать и другие микроконтроллеры, например, RobotDyn NANO . Управление производится через Bluetooth модуль HC-05. Для этого была написана простая программа для телефонов на Android в сервисе App Invertor. Подробную инструкцию по изготовлению катера, схему сборки, скетч для Ардуино и приложение для Android вы можете скачать на этой странице.
Как сделать радиоуправляемый катер
Для этого проекта нам потребуется:
- плата Arduino UNO;
- два мотора 5В;
- аккумулятор на 9В (крона);
- 2 транзистора и резисторы;
- кусок пеноплекса 50 мм;
- фанера 3-4 мм, линолеум, пластик;
- паяльник, термопистолет, канцелярский нож;
- клеммник, провода и изолента.
Если вы будете использовать моторы от наборов Ардуино, то транзисторы не понадобятся. В данном проекте использовались советские моторчики на 3,5 В, которым не хватает Ампер от пинов на плате, поэтому моторчики подключались к порту Vin (источник питания платы), через резистор, чтобы снизить напряжение. Включение и выключение моторов постоянного тока производится через транзисторы.
Изготавливаем катер на Ардуино своими руками
Для начала необходимо изготовить корпус для катера из куска пеноплекса толшиной 50 мм. В пеноплексе необходимо вырезать полости, где потом будет размещаться микроконтроллер, аккумулятор крона и моторы. На фото представлен вид катера до монтажа на корпусе моторов и электрической «начинки» проекта для начинающих. Скачать и распечатать шаблон катера вы можете на этой странице далее.
Далее необходимо разместить всю «начинку» в корпусе катера. Чтобы защитить микроконтроллер и все модули от попадания брызг воды, поверх корпуса укладывается лист линолеума, вырезанный по габаритам пеноплекса. Поэтому необходимо делать достаточной глубины вырезы в пеноплексе для установки кроны и платы Arduino. Схему подключения Bluetooth модуля и моторов к плате Ардуино смотрите далее.
Скопировать готовый скетч для катера на Bluetooth управлении можно далее. Для создания приложения на Андроид использовалась программа App Inventor. Скачать скетч для катера на Ардуино, файл с приложением для Androida и шаблон катера можно скачать одним архивом . Приложение сохранено в формате .aia
, файл необходимо открыть в ai2.appinventor.mit.edu и скачать на телефон через QR-Code Reader.
int
val; // освобождаем память для переменой
#define
M1
12 // порт левого мотора
#define
M2
10 // порт правого мотора
void
setup
()
{
Serial
.begin
(9600); // подключаем последовательный порт
pinMode
(M1
, OUTPUT
); // назначаем режим работы 12 порта
pinMode
(M2
, OUTPUT
); // назначаем режим работы 10 порта
}
void
loop
()
{
if
(Serial
.available
()) // проверяем, поступают ли команды
{
val = Serial
.read
(); // переменная val равна полученной команде
if
(val == «1»
) { // едем прямо
digitalWrite
(M1
, 1);
digitalWrite
(M2
, 1);
}
if
(val == «2»
) { // стоп
digitalWrite
(M1
, 0);
digitalWrite
(M2
, 0);
}
if
(val == «3»
) { // едем налево
digitalWrite
(M1
, 0);
digitalWrite
(M2
, 1);
}
if
(val == «4»
) { // едем направо
digitalWrite
(M1
, 1);
digitalWrite
(M2
, 0);
}
}
}
В отличии от лодки на Ардуино , где для передвижения использовался один мотор с винтом, в данном проекте используется два мотора и гребное колесо. При этом отпадает необходимость использовать сервопривод, который потребляет большое количество энергии, для изменения направления движения. Повороты катера осуществляются попеременным включением моторов по Блютуз сигналу.
Для изготовления гребного колеса использовалась обычная фанера и пластик. Диаметр колеса следует выбрать такой, чтобы лопасти доставали до воды. Сами лопасти вырезаются из ПЭТ бутылки, вставляются в прорези на колесе и фиксируются термоклеем. Также вы можете покрасить гребные колеса, защитив фанеру от разбухания в воде, а пеноплекс от краски на основе ацетона только разъест.
Современные производители рыболовных приспособлений делают постоянные шаги вперед и предлагают любителям порыбачить все новые, более уникальные снасти. Главным преимуществом рыболовных корабликов является то, что они значительно ускоряют и совершенствуют процесс ловли рыбы. Вы тоже хотели бы опробовать это приспособление в деле? У вас есть два варианта: купить прикормочный кораблик в магазине или попробовать сделать радиоуправляемый катер своими руками.
Самодельный радиоуправляемый катер можно эксплуатировать на протяжении всего рыболовного сезона, с лета и до начала холодов. Особенно прочные и мощные модели подойдут также для раскладывания приманки в зимний период на сложных водоемах с сильным течением.
Радиоуправляемый кораблик для рыбалки своими руками поможет вам приманивать и вылавливать такую рыбу, как щуку, голавля, жереха, густера, окуня, карпа и многих других. За счет небольшого веса и мощного двигателя такие кораблики быстро доставляют прикормку в нужное место. Благодаря же возможности полностью контролировать местонахождение корабля на воде расстановка прикорма максимально точна.
Большой плюс, который получает рыбак, решивший изготовить радиоуправляемый катер для рыбалки своими руками, — возможность рыбачить в любых обстоятельствах. Известно, что на доставку прикормки с помощью рогатки или ракеты уходит большое количество времени и сил, к тому же при плохих погодных условиях эти методы не всегда работают слаженно. Радиоуправляемый катер своими руками способен преодолевать трудности в виде течения или растительность, развивать высокую скорость и маневрировать, транспортировать прикормку для рыбы на большие дистанции.
Вместе с тем современный катер на радиоуправлении для рыбалки своими руками применяется не только для доставки прикорма, но и для транспортировки снастей и расставления мушек. Труднодоступные места и непроходимые заросли, которые раньше мешали рыбаку добраться до рыбы и поймать ее в сети, сегодня уже не преграда. Радиоуправляемый кораблик своими руками способен быстро и качественно моделировать свой маршрут, огибать препятствия на пути, сканировать водоем на предмет наличия рыбы и даже расставлять маркеры, которые позволят легко ориентироваться и оформлять зону поклева в дальнейшем.

Как устроен радиоуправляемый катер своими руками
Независимо от сложности модели и мощности агрегата радиоуправляемый катер для рыбалки своими руками работает по похожему принципу, отличаясь лишь некоторыми дополнительными деталями и характеристиками.
Форма кораблика , независимо от его мощности, имеет правильную геометрическую форму, что позволяет конструкции прочно удерживаться на воде и балансировать даже при сильном течении и порывах ветра.
Изучая чертежи радиоуправляемого катера своими руками, вы убедитесь, что нижняя часть кораблика утяжеляется специальной пластиной, которая не дает ему затонуть в процессе транспортировки прикормки.
С задней стороны радиоуправляемый катер своими руками оборудован специальной емкостью для прикорма. Размеры бункера для корма могут отличаться, в зависимости от модели и предназначения кораблика. Некоторые бункеры для прикормки оборудованы клапанами, которые открываются по команде рыбака в наиболее выгодное время и в пригодном для приманки рыбы месте.

Главным движущим элементом кораблика является двигатель. Он отвечает за развитие скорости, маневренность и количество возможных транспортировок прикормки к месту поклева. Важно помнить о том, что радиоуправляемые модели катеров своими руками оснащаются подходящими двигателями, который влияет не только на работу гаджета, но и на его грузоподъемность и способность балансировать на воде. Не стоит приобретать небольшие модели корабликов и большие моторы, поскольку таким образом вы усложните работу своему агрегату.
Аккумуляторы предназначены для передачи электрической энергии двигателю и приведения снасти в движение. От размера батареи зависит продолжительность и эффективность работы кораблика.
Некоторые модели корабликов оборудованы специальным устройством под названием эхолот. Функция эхолокации позволяет с легкостью сканировать дно в процессе транспортировки прикорма и подавать на экран пульта управления информацию о количестве рыб под водой, наличии неровностей дна, месте прикорма и особенностях рельефа.
Кораблик для прикорма своими руками
Как сделать радиоуправляемый катер для рыбалки своими руками? Несмотря на большое количество современных моделей водяных змеев от производителей кораблик можно сконструировать своими руками. Самостоятельное изготовление подходит для случаев, если вы не планируете частые вылазки на рыбалку и не являетесь большим поклонником новомодных приспособлений для вылова рыбы. К радости тех, кто интересуется тем, как сделать радиоуправляемый катер, конструкция самодельных корабликов достаточно примитивна и собрать ее не составит много труда.

Из материалов для изготовления водяного змея вам понадобятся:
- Доски из легкого дерева (яблоня, груша). Такой материал является достаточно прочным и в то же время хорошо держится на воде. Эти качества очень важны, так как позволят сделать кораблик маневренным.
- Алюминиевые пластины. Обязательный участник любой инструкции, как сделать радиоуправляемый катер своими руками, которые помогут собрать корпус в единое целое и достаточным образом его утяжелить. Благодаря алюминиевым пластинам прикормочная лодка для рыбалки приобретает способность справляться с течением на водоеме.
- Рыболовная леска и катушка. Поскольку самодельные кораблики не оснащены мощным двигателем и балансирующими деталями, руководить ими на воде придется с помощью лесок и катушек. Без них радиоуправляемый катер своими руками не сможет качественно функционировать.
- Элементы крепления. Помогут вам прочно закрепить детали и быть уверенными в том, что ваш агрегат справится с доставкой прикорма и снастей на выбранном вами водоеме.
- Поводки. Элементы крепления, которые способны фиксировать леску натяжения в нужном положении и помогать в процессе растягивания приманок и мушек.
- Спиннинг. Помогает руководить корабликом и следить за его движением на воде, особенно если рыбалка производится на водоеме с сильным течением.

Что использовать в процессе приманки и вылова рыбы?
- Прикорм с феромонами. Часто используется в процессе вылова крупной рыбы на трофейной или спортивной рыбалке. Корм содержит определенные микроэлементы, которые провоцируют выработку у рыбы гормонов и привлекают ее внимание. Биологически активные вещества качественно увеличивают количество улова и уменьшают время на затравку и привлечение рыбы к месту поклева.
- Мушки. Наиболее распространенные детали для привлечения рыбы, которые воздействуют на потенциальную добычу внешним видом, имитируя движение живых насекомых. Существует большое количество разновидностей мушек, которые выбираются в зависимости от особенностей водоема и типы рыбы, которую вы планируете поймать. В магазинах можно найти мушки в форме стрекоз, бабочек, тараканов, мух и пауков. Выбирая мушки, вы должны помнить о том, что в коллекции рыболова должен быть запас различных видов мушек, которые стоит чередовать в процессе раскладывания приманки. Мелкие мушки привлекают мелкую рыбешку, которая в свою очередь может стать живой приманкой для более крупной добычи.
- Живая приманка. Используется для привлечения крупной рыбы на больших водоемах. В зависимости от типа рыбы, которая вас интересует, можно приобрести различную живую приманку или заготовить ее самостоятельно. При самостоятельной заготовке живой приманке необходимо обязательно учитывать сезон рыбалки и гастрономические предпочтения рыбы. Так же, как и с мушками, важно предусмотреть наличие различного типа прикормки, чтобы иметь возможность моделировать способы вылова и оптимизировать весь процесс.
Особенности рыбалки корабликом ручного производства
Кораблики, которые изготавливаются своими руками, имеют некоторые особенности. Их важно учитывать, планируя расположение прикорма и заготавливая принадлежности для рыбной охоты.
Помните, что для кораблика ручной работы подходят открытые водоемы с относительно спокойной водой. Стремительное течение или чрезмерная растительность могут помешать процессу растяжки лески и расположению приманки.
Обращайте внимание на берег, с которого запускаете кораблики. Помните о том, что большая растительность на берегу может также помешать движению агрегата по воде. Просчитывайте маршрут радиоуправляемого катера для прикормки так, чтобы исключить любую вероятность зацепления лески.
Скорость проводки и расположения приманок с корабликов ручной работы должна быть средней, чтобы не вспугнуть косяк рыбы и не испортить назначенное место для поклева.
Двигаться в процессе проводки кораблика нужно от истока водоема, чтобы не отбрасывать тень на воду и не пугать рыбу. Одновременно это необходимо для того, чтобы всегда иметь возможность видеть кораблик и вовремя корректировать его движения при течении или начале поклева.
Мы уже рассказывали о самодельном катере для завоза приманки, в той статье давалась подборка электроники и рассказывалось об изготовлении. Если вы хотите сделать такой катер своими руками, то перейдите на статью Самодельный радиоуправляемый катер для завоза прикормки .
В этой статье мы поговорим о функциях такого радиоуправляемого катера.
Первое, что должен уметь катер – это передвигаться по водоему и сбрасывать груз прикормки.
Фактически, для этого можно доработать практически любой радиоуправляемый катер, установив на него дополнительную сервомашинку, которая мудет опрокидывать короб с рыболовной приманкой.
На видео ниже идет тестирование самодельного катера для рыбалки в ванной.
Кроме завоза приманки, катер можно использовать для завоза крючков удочки или закидушки. Для этого он оборудован двумя «отцепами». Управлять отцепами можно с помощью правого стика на передатчике. Механизация отцепов выполнена с помощью тех же сервомашинок.
Движение правого стика вниз – опрокидывает кузов с прикормкой для рыбы.
Такое управление дает возможность за один заход не только завести приманку, но и крючки в пару разных мест водоема.
Не смотря на достаточно простой вид, такой рыбацкий катер для завоза приманки может очень сильно облегчить рыбалку. При этом его стоимость, при учете того, что корпус корабля изготавливается самостоятельно, не велика. В спец магазинах катера для рыбалки продаются по цене начиная от 800-1000$, а электронику для самодельного катера можно купить за 150$. Ссылки на начинку катера смотрите в статье про изготовление.
На испытаниях катер показал не большую скорость, из за недогруза (испытывался без груза прикормки) винт частично оказывался высунутым из воды и происходило «проскальзвание» винта в воздушно водяной смеси. Тем не менее, это не помешало самодельному рыболовному катеру для завоза приманки заплыть практически за границу видимости на воде.
Кстати. Сделать самодельный катер на радиоуправлении доступно даже ребенку! Посмотрите на видео ниже – двое ребят сделали подобный катер из остатков радиоуправляемого вертолета и потолочной плитки. Как можно увидеть на видео – это не помешало ему отправится в плавание.
Так что, если у вас есть желание иметь рыбацкий катер для завоза приманки, но не хочется платить за него много денег, то вы можете сделать его своими руками!
Еще про радиоуправляемые модели
:
— Делаем квадрокоптер из линеек.
— Изготовление катера для прикормки своими руками.
— Изготовление квадрокоптера из подручных материалов.
— Делаем модель радиоуправляемой яхты за один вечер.
— Как сделать простую радиоуправляемую модель самолета.
— из такого конструткора можно собирать самодельные радиоуправляемые модели автомобилей.
Коля комментирует:
Весьма интересно. Надо будет попробовать сделать такой катерок. Не для рыбалки, а так, погонять по водоему.
Для начала небольшая историческая справка о прототипе. История создания немецких торпедных катеров берет начало в годы Первой Мировой Войны. Впервые образец кораблей такого типа был построен в 1917г. Сразу можно сказать, что он был очень далек от совершенства. Но все же к концу войны флот Германия насчитывал 21 катер. После окончания войны многие страны потеряли интерес к этому типу оружия. По-другому обстояли дела в Германии, на которую было наложено множество ограничений по части вооружений, согласно Версальскому договору. Кстати, о торпедных катерах там ни чего не было сказано. Поэтому, немцы в 1923г. сначала приобрели несколько старых торпедных катеров для «Ганзейской школы яхтсменов» и «Германского спортивного общества открытого моря». Под прикрытием этих организаций начались работы по совершенствованию имеющихся катеров и созданию новых. К концу 30-х были выработаны требования тактико-технические требования к новым «москитам». Согласно немецкой морской доктрине, скоростные показатели, в отличие от проектов катеров других стран, были относительно невысокие — около 40 узлов. К тому времени разными фирмами были представлены три варианта катеров с разной компоновкой и различным количеством бензиновых двигателей. Но они не удовлетворили военных, поэтому, требовался совершенно новый проект. В 1928г. внимание специалистов привлекла моторная яхта Oheka II, построенная фирмой «Люрссен» для американского финансового магната. Корпус, по тем временам, имел передовую конструкцию, его силовой набор был выполнен из легких сплавов, а обшивка состояла из двух слоев древесины. Три бензиновых двигателя позволяли яхте развивать скорость 34 узла. По тем временам это были выдающиеся характеристики. В ноябре 1929г. фирма «Люрссен» получила заказ на разработку и постройку торпедного катера. За основу конструкторы взяли проект яхты Oheka II, почти вдвое увеличили водоизмещение чтобы компенсировать момент, создаваемый высокорасположенными торпедными аппаратами. Катер вступил в строй 7 агуста 1930г. и несколько раз менял свое название, в результате он получил обозначение S-1 (Schnellboot). Следует отметить, что даже увеличение мощности двигателей не помогло добиться проектной скорости 36,5 узда. На скоростях близких к максимальной нос катера выходил из воды происходил замыв бортов и возникало сильное брызговое сопротивление. Эту проблему удалось решить применив так называемый «Эффект Люрссена». Суть его заключалась в том, что в потоки крайних гребных винтов ставили небольшие вспомогательные рули, которые поворачивали 15-18 градусов в сторону борта. Это помогло добиться увеличения скорости до двух узлов. Впоследствии, вспомогательные рули стали обязательной частью конструкции всех шнельботов. S-1 и стал прородителем всей серии немецких торпедных катеров класса S. С 1943 начали производиться катера наиболее удачной модификации Schnellboot типа S-100. От кораблей предыдущих типов он отличался бронированной рубкой куполообразной формы. Катера класса S-100 имели почти вдвое большую длину, чем катера противника аналогичного класса. Они были оборудованы каютами, камбузом, гальюном и всем необходимым для длительных переходов, что позволяло использовать их на большом удалении от баз. На катерах этого типа стояли двигатели общей мощностью 7500 л.с., что позволяло им развивать скорость 43,5 узла.
Подготовка и сборка корпуса
Модель торпедного катера S-100 в масштабе 1:72 выпускает немецкая фирма Revell. О самой модели скажу немного, сейчас остались только такие фото литников.


При ближайшем рассмотрении видно, что все детали выполнены на высоком уровне, нет утяжин и смещений, совсем немного облоя. Порадовало большое количество деталей и качество их проработки. Данная модель сразу, еще до приобретения, планировалась под радиоуправление. Ее приличная длина — 500мм, позволяла сделать неплохую радиоуправляемую модель катера. Она так же задумывалась для выступления в классе F-4A на соревнованиях по судомодельному спорту. Работа над моделью началась еще до создания блога, но мысль о нем уже была, поэтому и делались некоторые фото процесса постройки.
Постройка радиоуправляемой модели катера началась с подготовки и склейки корпуса. В принципе, стыкуемость деталей модели хорошая, но для удобства корпус, которой длинной почти 500мм, я клеил по частям.


Затем, для герметичности корпуса, очень хорошо пролил полистироловым весь шов.
Изготовление и установка дейдвудных и гельмпортовых труб
Следующий этап подготовка к изготовлению дейдвудных и гельмпортовых труб. Для этого на токарном станке выточил втулки. Для гребных валов и баллеров рулей буду использовать пруток диаметром 2мм. Внутренний диаметр втулок дейдвудных труб нужно выдерживать строго по диаметру гребных валов. Это необходимо для обеспечения герметичности.
Сами трубы сделал из трубчатых колен антенн нужного диаметра. К сожалению, фото дейдвудных труб получились не удачными, но я думаю, суть понятна.


Процесс изготовления гельмпортовых труб такой же, а здесь фото хорошие и на них все видно. В куски трубок вставляем втулки и хорошо запаеваем их.

Теперь нужно вклеить дейдвудные трубы в корпус радиоуправляемого катера. Для этого сначала размечаем на нем места под трубы и кронштейны гребных валов. Делаем прорези и устанавливаем без клея дейдвудные трубы. Для облегчения монтажа можно сделать приспособление, как показано на фото, например, из куска корпуса дискеты.

Выставляем нужный угол гребных валов и приклеиваем к корпусу приспособление. Теперь необходимо сделать кронштейны гребных валов. На токарном станке точим латунные втулки, здесь внутренний диаметр можно сделать чуть больше. Если при изготовлении дейдвудных и гельмпортовых труб внутренний диаметр выдерживался строго 2мм, под имеющиеся валы, то в кронштейнах можно сделать 2,1мм. Так как выставить все три точки, на которые упирается гребной вал, на одной линии практически не возможно. А если будет хоть небольшой перекос, то гребной вал будет вращаться туго, что поведет к потере мощности моторов, возрастанию тока в цепи и лишнему расходу аккумулятора. На радиоуправляемой модели катера, небольшого размера, расход аккумулятора это очень важный параметр. Так как место и вес батареи ограничены, и мы не сможем разместить аккумулятор большой емкости. В каждой втулке, шлицовкой, делаем пазы-пропилы и туда припаиваем латунные полоски, получая V кронштейна, согласно чертежу. Можно использовать как шаблоны пластиковые детали модели. В части, которая будет вклеиваться в корпус делам несколько разрезов, чтобы потом деталь было легче загибать и приклеивать эпоксидной смолой к текстолитовым площадкам.


Теперь делаем в корпусе модели прорези под кронштейны и ставим их не вклеивая. Проверяем легкость кручения валов, если они вращаются очень легко сначала наживляем небольшим количеством циакрина дейдвудные трубы и опять проверяем легкость вращения валов. Если все в порядке, можно окончательно приклеить дейдвудные трубы. После затвердивания циакрина можно убрать приспособление. Теперь нужно вклеить кронштейны гребных валов. В принципе, некоторые коллеги вклеивают их в корпус и затем проливают жидко разведенным в клее полистиролом. Но после одной неудачной модели, возможно из-за качества пластика корпуса, где после высыхания этого состава детали сдвигались и зажимали гребные валы, неоднократная переклейка не помогла, этот узел я стал делать вот по такой схеме. Возможно это увеличивает временные затраты, зато после вклейки, точно ни что и ни куда не сдвинется от деформации. В небольших кусках стеклотекстолита прорезаются пазы под кронштейны и сверлятся по периметру отверстия диаметром примерно 2,5мм. Затем эти пластины устанавливаются внутрь корпуса так, чтобы их прорези совпали с прорезями в корпусе. После размечаются и высверливаются отверстия в корпусе катера, так чтобы они совпали с отверстиями в пластине. Теперь из кусков литника точатся детали, наподобие гвоздей. Их малый диаметр должен совпадать с диаметром отверстий, которые, насверлены в пластине и в корпусе. Этими деталями, вклеивая их модельным клеем, закрепляем пластины с внутренней стороны корпуса катера. Данная операция нужна для того чтобы иметь возможность приклеить кронштейны гребных валов к корпусу эпоксидной смолой. В процессе отвердевания эпоксидной смолы имеется возможность контролировать положение кронштейнов и при необходимости корректировать его. Так же после полимеризации смолы не произойдет деформации пластикового корпуса и смещения кронштейнов. Затем можно разметить и вклеить на циакрине гельмпортовые трубы. Затем для герметизации и укрепления клеевых соединений прокладываем их двухкомпанентной эпоксидной шпаклевкой Epoxy Putty фирмы Tamiya.



Теперь можно зашпаклевать места установки дейдвудных труб и пластин под кронштейны. Для этого я использую двухкомпанентную автомобильную шпатлевку BODY SOFT.


Автомобильная шпатлевка BODY SOFT застывает довольно быстро, уже через несколько часов можно обработать корпус. Я такие вещи делаю на ночь, чтобы к следующему вечеру все точно отвердело.
Изготовление моторамы
Следующий этап — изготовление моторамы и установка на ней электромоторов. Коллекторные электродвигатели я купил в нашем магазине «Хобби», по всей видимости они китайского производства. Установить их тип не представляется возможным, могу только сказать, что на ценнике было написано напряжение питание 3-12V.

По типоразмеру что-то подобное используется в CD-ROMах. Кстати, выбор двигателей очень ответственный момент при постройке радиоуправляемой модели катера. Нужно стараться подобрать электромоторы таким образом, чтобы при
планируемом Вами напряжении питания и минимальном потребляемом токе они обеспечивали достаточный крутящий момент. На данном этапе также можно произвести компоновку модели. В корпусе расположить массо-габаритные макеты электромоторов, приемника, рулевых машинок и батареи питания. Эту операцию можно проводить в ванной. Нужно добиться того, чтобы модель располагалась в воде как можно ближе к ватерлинии. Так же надо избегать кренов и дифферентов. При этом, не забыть о доступности элементов аппаратуры и ходовой части после приклейки палубы. На этом этапе необходимо продумать съемные узлы для доступа к ним. Например, надстройки или еще каких-либо другие элементы конструкции. Так же необходимо заранее продумать о герметичности всей конструкции.
Я выбрал схему со всей съемной основной палубой и фальшпалубой из оракала. Данная схема была уже неоднократно проверена и доказала свою жизнеспособность. Вернемся к мотораме, ее я изготовил из фольгированного стеклотекстолита. Были перпендикулярно припаяны две пластины и между ними, для прочности конструкции, припаян уголок-подкос. Двигатели к раме крепятся болтами M2.


Сначала из фольгировнного стеклотекстолита была вырезана основа, к которой будут крепиться двигатели. В ней просверлены четыре отверстия под болты М2 и два отверстия под круглую часть корпуса двигателей. Затем, из фольгированного стеклотекстолита, изготавливаем часть, которая будет крепиться к бобышкам, установленным на корпусе модели. В ней я просверлил два отверстия для крепления, но все же, лучше подумать, где расположить третье отверстие. Все-таки крепление на три точки более надежное. Затем припаиваем эти две детали под углом 90 градусов и устанавливаем между ними уголок для жесткости. Как показала практика, деталь к которой крепятся моторы лучше сделать из более толстого материала, для жесткости.


Вот так выглядит этот узел в сборе с электромоторами.



Сама рама крепится к корпусу радиоуправляемой модели катера на бобышки из оргстекла с резьбой М3.


Установка гребных валов и кронштейнов
Теперь нужно собрать узел дейдвуды — валы-кронштейны. Для своей радиоуправляемой модели катера Schnellboot S-100 я использовал валы диаметром 2 мм фирмы Gaupner. Чтобы их не погнуть и не повредить во время подготовитель работ, для установки и подгонки ходовой части модели, использовались спицы от велосипеда, диаметр которых тоже 2мм. Так как дейдвудные трубы уже вклеены в модель, сейчас предстоит зафиксировать кронштейны гребных валов. Для этого вставляем валы из велосипедных спиц в дейдвуды, устанавливаем кронштейны на место и загибаем их разрезанные части внутри корпуса.


Затем проверяем легкость вращения валов в этой системе. При необходимости выставляем и подгибаем кронштейны как нужно. В конечном итоге надо добиться, чтобы валы очень легко вращались во всей этой системе. После, небольшим количеством эпоксидной смолы, наживляем кронштейны гребных валов, приклеивая их к площадкам из текстолита. Во время отвердевания смолы постоянно контролируем легкость вращения гребных валов, при необходимости корректируем положение кронштейнов. Этот этап очень ответственный, так как правильная установка и фиксация системы дейдвуды — валы-кронштейны и легкость вращения валов, в дальнейшем, сильно скажется на ходовых характеристиках модели и повлияет на расход аккумуляторных батарей. После окончательного отвердевания эпоксидной смолы еще раз проверяем легкость вращения вылов, и если все в порядке, окончательно фиксируем кронштейны, хорошо проливая место склейки на текстолитовых площадках эпоксидной смолой. На этом фото показан узел с уже загнутыми и вклеенными на эпоксидную смолу кронштейнами.

Следующий этап, после фиксации кронштейнов, установка моторамы с двигателями. Для этого сначала, на токарном станке, точим бобышки и нарезаем в них резьбу под винты, которыми будет крепиться моторама. На фото выше видно, что бобышки уже установлены в корпус. Опишу несколько подробнее процесс их установки. Бобышки я сделал из оргстекла, а резьба нарезана под болты М3. Для упрощения процесса установки моторамы с двигателями делаем две простые приспособы. На токарном станке точим две втулки. Так как у нас гребные валы и валы электродвигателей имеют диаметр 2мм, делаем внутренний диаметр втулок 2мм. Их длина примерно 30мм, а внешний диаметр особого значения не имеет. Затем, при помощи этих втулок, будем соединять валы моторов и гребные валы в одно целое. Прикручиваем бобышки к мотораме, и подгоняя их, выставляем мотораму в корпусе, так чтобы гребные валы вращались с максимальной легкостью.
Соединение электромоторов с гребными валами
После установки гребных валов и моторов на радиоуправляемую модель катера, надо подумать об их соединении. Существует несколько различных схем. Можно соединять эти узлы с помощью гибкого соединения, например, пружины или при помощи карданного соединения. Мы будем использовать второй вариант. Для этого на токарном станке, сначала, из стали, выточим две втулки с шариком. Просверлим шарики для дальнейшей установки шпонок из проволоки.

Здесь фото уже установленной детали на валу со шпонкой.
Затем выточим, из стали, две чашки и сделаем пропилы для шпонок. После просверлим чашки, с двух сторон сверлом на 1,6мм, и нарежем резьбу М2 для фиксирующих винтов.

Собираем все детали вместе. На валы выточим ограничивающие втулки и запаяем их так чтобы при навинченных гребных винтах и установленных ограничительных втулках был небольшой люфт.

Далее, на один из концов вала, запаиваем втулки с шариками и вставляем в отверстия проволочные шпонки, так чтобы они легко двигались. Конечный результат Вы видели на фото выше. Чашки закрепим винтами на валах электромоторов. Теперь вставляем валы в дейдвуды, устанавливаем мотораму на место и собираем все вместе.


Следующий этап – изготовление гребных винтов. Как это сделать описано в статье .
Пока будем использовать не обработанные гребные винты.

Сейчас можно подать питание на двигатели и проверить как все работает.
Изготовление рулей для модели
Теперь на радиоуправляемую модель катера Schnellboot S100 надо изготовить рули. На эту модель их надо сделать 3 штуки. По правилам рули и винты можно сделать несколько больших размеров. Если центральный руль вполне достаточной площади, то боковые рули маловаты. Перо имеют форму трапеции, поэтому, сначала из бумаги, сделаем выкройку. За основу можно взять рули из набора и немного увеличить площадь. После примерки выкроек перенесем их на материал, из которого будем делать детали. Здесь лучше применить нержавеющий и хорошо паяющийся металл. Для этих целей я использую листовую латунь толщиной 0,2-0,3 мм. Баллер делаем из велосипедной спицы, ее диаметр 2мм. Одни конец, на длину пера, плющится и обтачивается на электроточиле. Вот такие получились детали, приготовленные к пайке.


Устанавливаем баллер по месту оси вращения и хорошо припаиваем его мощным паяльником к одной из стенок пера. Затем сгибаем перо и запаиваем заднюю кромку, после, припаиваем торцы.

Вот такие получились необработанные детали.

Теперь их надо обработать и придать рулям нужную форму.

По такому же принципу делаем и центральный руль. Он несколько более сложной формы, но суть процесса подобна вышеописанной. Единственное отличие, здесь передняя кромка делается из медной трубки.


В конечном итоге получаются вот такие рули


Герметизация корпуса и обеспечение плавучести
Следующий этап — установка водонепроницаемых переборок в корпус. Это нужно для того чтобы обеспечить радиоуправляемому катеруплавучесть при попадании воды внутрь. Для небольшой модели это особенно критично, так как даже малое количество воды может привести к ее затоплению и возможно потере. Поэтому разобьем внутренний объем на четыре отсека и установим водонепроницаемые переборки из полистирола. Теперь можно провести испытание на плавучесть, для этого будем затоплять отсеки водой.
Затоплен один отсек.

Затоплено два отсека.

Затоплено три отсека.

Как видно на фото, даже при затоплении трех отсеков, часть радиоуправляемого катера осталась на плаву. Из этого следует, что и в такой ситуации возможно спасти модель. Таким образом, она получилась разбитой на четыре отсека: носовой,

второй – отсек электроники,

третий – моторный

и кормовой

с рулевой машинкой и приводами рулей. Но что бы не допускать попадания воды внутрь, необходимо, заранее, хорошо герметизировать корпус. Для обеспечения герметизации внутреннего объема, путем заклейки корпуса оракалом, к бортам приклеим бортик из полистирола. Для получения доступа к отсеку электроники, после приклейки носовой части палубы, в переборке делается люк, поднимающийся вверх. А для возможности съемки гребных валов в ней делаются отверстия, которые потом будут заклеиваться оракалом.
Установки рулевой машинки и электроники
Теперь наступило время установки рулевой машинки и электроники на радиоуправляемую модель катера Schnellboot S100. Для этого, сначала, продумаем как ее крепить серво привод. Я сделал три стойки-кронштейна из толстого литника и усилил их крепление уголками из полистирола. Саму раму сделал из пластиковой заглушки от компьютера. Она имеет форму уголка и получилось вполне удобное крепление.


В качестве сервопривода использовал китайскую рулевую машинку HXT-500, весом 8 грамм. Тягу сделал из проволоки диаметром 1мм с защелками из авиамодельной корды.

Устанавливаем все на место, раму крепим саморезами к стойкам из литников.


Во втором отсек отсеке размещаем электронику. Там будут располагаться приемник и регулятор хода.

Палуба с главной надстройкой пока не установлена, но в дальнейшем они будут вклеены и для возможности установки и снятия электроники, в переборке, сделан поднимающийся вверх люк.


Аккумуляторы для модели расположим в моторном отсеке. Чтобы батарея не мешала вращению гребных валов, сделаем подложку-перегородку, тоже из компьютерной заглушки. По бокам, чтобы аккумулятор не болтался, проложим полоски из пористого упаковочного материала.


Теперь радиоуправляемая модель катера Schnellboot S100 готова к ходовым испытаниям.
Видео ходовых испытаний
Продолжение следует…
Радиоуправляемый катер для рыбалки — это настоящая находка, которую может соорудить любой мастер собственными руками. С его помощью осуществляется завоз прикормки на дальние расстояния. Купить такое изделие можно в специализированном магазине, но уже после нескольких походов на рыбалку оно сломается. Естественно, есть очень качественные модели, но их стоимость тоже впечатляет. Лучше соорудить катер на радиоуправлении самостоятельно, так можно быть уверенным в его исправности, да и запчастей понадобится немного.
Нельзя сказать, что собрать такое небольшое судно очень уж просто. Но если соблюдать инструкцию, то для изготовления самоделки понадобится всего день.
Для начала следует собрать необходимый материал и инструмент:
- стеклопластик, фанера или другой материал, из которого можно будет вырезать корпус кораблика;
- силовой каркас из алюминиевого профиля;
- горячий клей (или другое средство для фиксации частей, которое будет устойчивым к воздействию воды);
- монтажная пена;
- двигатель;
- регуляторы;
- аппаратура для осуществления управления корабликом;
- аккумулятор, благодаря которому будет работать моторчик;
- провода и разъемы для подключения и соединения всех компонентов схемы;
- паяльник;
- дейдвудная труба;
- вал с винтом, благодаря которому будет осуществляться передвижение катера;
- ножовка или электролобзик.
Конструкция аппарата может быть абсолютно любой. Главное, чтобы она была действенной. Для этого важно правильно рассчитать водоизмещение этого маленького судна.
Вообще, такая небольшая лодка считается настоящей находкой, ведь рыбаку не придется думать, как доставить прикормку на большое расстояние. Кроме того, к ней можно прикрепить эхолот и обследовать водоем в поисках наиболее рыбного места.
Радиоуправляемый кораблик для рыбалки своими руками сделать нетрудно, нужно просто соблюдать последовательность выполнения работ:
- Изготовление корпуса. Если используется фанера, то дополнительно придется облицевать ее стеклотканью и обмазать эпоксидной смолой. Это поможет защитить материал от гниения. Вырезать фанеру или стеклопластик необходимо по предварительно нарисованной или скачанной схеме. Для того чтобы герметизировать все швы, необходима монтажная пена.
- Установка силового каркаса. Благодаря ему нагрузка на корпус распределяется равномерно, и он остается на плаву. Нос кораблика можно заполнить пеной, которая гарантирует его непотопляемость.
- Монтаж трубы с винтом. Лопасти движущего компонента остаются внутри корпуса, поэтому они не запутаются в водорослях, не поранят рыбу, а также не зацепятся за корягу. Отверстие трубы дополнительно нужно закрыть решеткой.
- Обустройство электронной части. Вот теперь устанавливается двигатель, дейдвудная труба, вал с муфтой и гребной винт. Чтобы рыболовный катер мог плыть в заданном направлении и поворачиваться, нужно оснастить его регуляторами.
- Монтаж серводвигателей для открывания емкостей с прикормкой. Они должны находиться в корпусах, внутрь которых не попадает пыль и влага.
- Установка аккумуляторов.
Для управления изделием лучше выбрать пятиканальную радиосистему, которая устанавливается на игрушки.
Как видно, кораблик для рыбалки своими руками делается быстро.
Кроме того, есть другие полезные рекомендации, которые помогут не только самостоятельно сконструировать изделие, но и сделать его долговечным:
- лучше выбрать не фанеру, а стеклопластик, ведь он гораздо легче и не требует дополнительной защиты от влаги, так как не поддается ее негативному воздействию (этот материал также отличается высокой прочностью);
- выбранный аккумулятор должен обладать достаточной емкостью, чтобы катер не заглох посреди водоема, но также важно обратить внимание и на вес компонента (он не должен слишком сильно утяжелять конструкцию);
- катер можно дополнительно оснастить подсветкой, навигатором — это даст возможность осуществлять ночную ловлю;
- для того чтобы изделие не ушло под воду, необходимо правильно рассчитать водоизмещение, которое колеблется в пределах 2,5-12 литров (тут влияет расстояние, на которое уплывает судно, количество подкормки, масса необходимого оборудования).
Ловля рыбы при помощи радиоуправляемого катера — настоящее удовольствие. Но чтобы кораблик уплывал на дальние расстояния, система управления должна быть рассчитана на это. Радиус ее действия не должен быть меньше 50 м.
Мое увлечение радиоуправляемыми моделями началось с постройки катера на радиоуправлении. Многим моделистам известен такой журнал как «Моделист конструктор». В одном из номеров за 198Х какой-то год я прочитал статью про спортивный катер и тоже захотел построить такой же. На страницах были приведены в масштабе необходимые чертежи. Вот что из этого получилось.
В связи с тем, что те годы прошлого столетия были достаточно тяжелые и для модели трудно было найти нужные детали, то все строилось из подручных материалов. Регуляторов и моторов вообще не было. Но буду последовательно вести рассказ.
В кружки и дом пионеров я не ходил, мастерил потихоньку дома. Про стеклоткань конечно слышал, но родители сказали это вредно и больше не обсуждается. Поэтому перевел все чертежи на толстый картон, нарезал на пенорезке кубиками пенопласт. Собрал шпангоуты вместе с пенопластом и прошелся пенорезкой.
Пенорезка была самодельная, между двух опор натянул нихромовую тоненькую проволоку, через которую пропускал ток от мощного 12 вольтового блока питания.
Далее все оклеил плотным картоном. Пропитал все лаком, предварительно открытые участки пенопласта покрыл ПВА, чтобы пенопласт не растворился. Шпангоут, где предполагался двигатель, сделал из стеклотекстолита. Корпус получился очень легким и достаточно прочным. Длина модели 800 мм, ширина 240 мм.
В качестве дейдвуда использовал алюминиевую трубку диаметром 10 мм, в которую после некоторых доработок напильником встали подшипники. В верхней части сделал масленку с пробкой под винт. В качестве вала использовал металлический пруток, на который нанес резьбу М4. В дейдвуд шприцем залил густое масло, от отцовской машины.
Киль сделал сам, к стержню припаял кусочек фольгированного стеклотекстолита. Также установил два подшипника для легкости хода.
На день рождения родители подарили первую серьезную двухканальную аппаратуру пистолетного типа Acoms на 27MHz с встроенным BEC-ом и двумя стандартными сервоприводами.
Мотор был первоначально установлен низкооборотистый на 12v, его характеристики мне были не известны, но крутящий момент был не маленький.
Лючки сделал быстросъемными, с одной стороны задвигаются, а с другой — на винтовых соединениях.
Регулятор с реверсом сделал сам примитивно просто. Взял тумблер от старого прибора на три положения. Разобрал, ослабил пружину, просверлил в ручке отверстие и присоединил тягу от сервопривода. Настроил в аппаратуре расходы. Работает как часы, чистая механика. Конечно, можно поспорить относительно данного решения, но напомню, что это делалось много лет назад.
В качестве винта использовал самодельный из гнутого металла, но спустя некоторое время мне удалось купить винт из латуни, результат ошеломил. Диаметр винта 40 мм.
Переделок много не последовало, нужно было только состыковать валы. С этой задачей позволил справиться гибкий соединитель, до этого были и шестеренки, чтобы повысить обороты, и карданная передача.
Аккумулятор использовал от машинки NiMh 7,2 3000mAh.
Но радость от скоростных заплывов была недолгой. Вдалеке от берега из катера пошел дым.
Уже на берегу осмотр показал, что горят провода и сильно греется мотор. Такого я еще не видел ни разу.
Взамен поставил толстенные провода в силиконе, плюс ко всему решил сделать систему водяного охлаждения. Купил медную трубку в автомагазине от тормозной магистрали. Плотно накрутил на двигатель. В транце сделал ввод и вывод. На киль припаял кусочек трубки. Соединил все резиновой трубкой из того же автомагазина. Тесты в ванной показали работоспособность системы, вода нагнетается в систему охлаждения от гребного винта.

На высокой скорости стало заплескивать воду в катер, пришлось все лючки перед заплывами заклеивать липкой лентой. При смене аккумуляторов ленту приходится переклеивать на борт для повторного использования, поэтому появляются пятна от частичек клея липкой ленты. Периодически приходится чистить корпус лодки.
Каждым летом рассекаю по водным просторам.


С момента постройки и по сей день катер существует, изменений в конструкцию не вносил. Одним словом, радует глаз и навевает приятные воспоминания о проведенном времени.
Увертюра
Три года назад под влиянием друзей увлекся карповой ловлей. Ловить меня научили, рассказали все секреты. Пошли первые карпы. И вот, однажды на рыбалке, я завистливым глазом увидел рыбака с карповым корабликом. Кораблик этот мне очень понравился. Спросил сколько стоит — он мне очень разонравился (1000$ «на минуточку»). Погуглил — оказалось, можно взять за 100$, но не то. К тому же, в голове моей назревал план масштабной самоделки, чтоб себя позабавить и сына заинтересовать.
Принято первое решение: сделать кораблик для завоза прикормки своими руками. Пролистал форумы по RC моделированию, прикинул смету — почесал репу. Выходило по-бедному около 150$ на комплектующие. Да, и задача мне показалась слишком легкой (горе мне наивному).
Принято второе решение: сделать своими руками максимально бюджетный кораблик, а в идеале бесплатно. Честное слово, друзья, не от жадности, а из спортивного интереса.
Итак, выработалась концепция: Решил делать кораблик на DTMF управлении. Это, когда звонишь с одного мобильного телефона (передатчика) на другой (приемник), и при нажатии на клавиши раздается «пиканье» разного тона. На втором телефоне (приемнике) остается лишь запрограммировать преобразование этого «пиканья» в разные команды управления в зависимости от полученного тона (один сигнал мотор запускает, другой — останавливает, третий — поворачивает).
Видите, как все просто? Преобразовывать сигнал я решил с помощью платы Arduino Uno. Детально рассмотрим этот вопрос в разделе Электроника. А начнем с корпуса.
Корпус
Изначально я рассчитывал использовать корпус от старой игрушки. Сын (он, так сказать, был в доле) с легкостью презентовал старый пиратский фрегат на колесиках. Но при предварительном взвешивании предполагаемого оборудования (аккумулятор, мотор, электроника, и т.п.) оказалось, что фрегату не хватает грузоподъемности.
К сожалению, я не смог найти в магазинах подходящей по форме игрушки за адекватную цену. И решил делать корпус для своего рыболовного кораблика самостоятельно. Опять-таки, пролистав множество форумов и статей, решил, что материалом послужит стекловолокно и эпоксидная смола.
Изготовление корпуса для кораблика я начал с построения болванки, на которую потом планировал наносить материалы. Болванку делал так: из ДВП и картона сделал остов. Закрепил его просто горячим клеем к листу ДВП.

Потом отсеки остова начал заполнять гипсом (алебастр). Маленький лайфхак: добавьте в алебастр немного уксуса, и он будет медленнее застывать, но при этом идет интенсивное выделение газов, так что не забывайте проветривать помещение.
Когда болванка подсохла, я ее немного подправил и обклеил бумажным скетчем, чтоб потом было легче отделять ее от корпуса.

Стекловолокно, которое я использовал, еще называется стекломат. Продавец сказал, что для кривых форм лучше использовать его. Эпоксидка самая простая.
И снова минутка ТБ: Работать нужно в ХОРОШО проветриваемых помещениях. Не шучу. Это вам не в спичечном коробке мешать пару капель. Пару раз над корпусом рыболовного кораблика нагнулся во время нанесения слоя эпоксидки, и потом три дня отдышаться не мог и голова болела.
Нанес я таких 2-3-4 слоя. Раньше и я удивлялся самодельщикам: неужели нельзя посчитать два или три слоя ты нанес. Оказывается, во время работы иногда приходится класть слои внахлест, а иногда приходится накладывать латки. Поэтому лучше просто ориентироваться на толщину стенок корпуса. У моего рыболовного кораблика в среднем стенки корпуса имеют толщину около 3 мм.
На данном этапе кораблик для завоза прикормки в точку ловли получил название «Макаронный монстр», т.к. волокна стекломата торчали во все стороны.


А также очень много грубой наждачной бумаги. Дальше процесс понятный: трешь, шпатлюешь, трешь, шпатлюешь. И так, пока не поймешь, что это лучшее, что ты способен сделать своими руками.

Когда я снял корпус с болванки, его вес составлял 1 кг 200 гр. Что довольно-таки хорошо для такой жесткости и такой грузоподъемности.

Красил, когда водомет уже был на месте (в следующем разделе описывается). Покраску проводил в три этапа: грунт и два слоя краски «Яхтная эмаль ПФ-167».

Мотор. Муфта. Дейдвуд. Винт

В этой главе расскажу о том, что является самым пугающим в судостроительстве для начинающих — о самодельном дейдвуде (гидроизолированный вал) и о том, что находиться по обе стороны от него: о винте и о моторе. Ну и как все это соединить своими руками, чтоб оно надежно и безотказно работало на прикормочном кораблике.
Самодельный дейдвуд для кораблика состоит из таких составляющих:
- Корпус — представляет собой тонкостенную трубку от старого холодильника. Внешний диаметр 5мм, внутренний — 4,5мм. Края пришлось вручную раскатать, чтоб по обе стороны встали подшипники с внешним диаметром 6 мм.
- Вал — это прут из нержавеющей стали диаметром 3 мм. С одной стороны нарезал резьбу М3 для крепления гребного винта.
- Подшипники 3*6*2 мм. Подшипники заказывал у китайца. На фото были подшипники с пыльниками, а по прибытию оказалось, что вместо пыльника там лишь проволочка какая-то. Китаец деньги вернул, но я решил уже ставить те, что есть.
- Сальники. Их роль исполняют изоляционные втулки TO-220 (радиодетали, если что).
На фото выше и на видео ниже видно, как собирается дейдвуд.
При работе, масло около подшипников может нагреваться и становиться более жидким, поэтому я решил добавить еще сальники из простых резиновых колечек 3/5 мм. Вставляются они прямо перед подшипником.
В качестве густой смазки я использовал ЛИТОЛ-24. Есть несколько нюансов в заполнении дейдвуда. Нужно забить корпус дейдвуда смазкой так, чтоб внутри была только смазка, а не половина смазки, половина воды. Для этого у шприца отрезается носик, чтоб получилась прямая трубка. Вынимается поршень. И такая трубка просто вставляется в бочонок (или что там у вас) со смазкой по самый край. Потом вставляется поршень в шприц, и только тогда мы вынимаем шприц полностью забитый смазкой без воздуха.
Что касается муфты, то считаю своим долгом сообщить, что муфту нужно брать заводскую. Проверил множество самодельных резиновых и металлических вариантов, но пока не купил нормальную муфту и не выставил мотор в отвес, были постоянные проблемы с надежностью и биением.
При выборе мотора я был ошарашен ценами, поэтому начал искать альтернативы. Нашел самый мощный из дешевых — это электродвигатель 540-4065.

Думаю, что можно было даже взять немножко слабее моторчик, но не утверждаю, так как не проверял пока свой прикормочный кораблик с более слабыми моторами. Возможно, когда-то дойдет до этого дело, с целью увеличить запас хода от одного заряда АКБ.
Гребной винт делал самостоятельно из латуни толщиной 1 мм. Вырезал три одинаковых лопасти в форме поросячьего уха. И припаял их к бронзовой стойке с резьбой М3. Получилось хорошо, но советую купить, или придется делать приспособу для пропорциональной спайки лопастей.

После первых тестов стало ясно, что все работает хорошо, но при одном условии: если дейдвуд имеет точку опоры не далеко от винта. В моем случае винт находится на солидном отдалении от выхода дейдвуда из корпуса. Решил сделать фиксацию относительно корпуса водомета, припаяв три гайки МЗ к дейдвуду и соединив винтами водомет и дейдвуд.

Водомет и поворотный механизм
При проектировании своего прикормочного кораблика я одновременно соотносил размер гребного винта, баллона для водомета и поворотного механизма. В результате перебора множества вариантов, остановил свой выбор на баллоне от дезодоранта. Внешний диаметр баллона составляет около 42 мм., что на 4 мм больше окружности винта, и на 3 мм. меньше диаметра поворотного механизма, который будет описан ниже.

После 153-х замеров я дрожащими руками вырезал отверстие в только что законченном корпусе своего кораблика.

Водомет вклеил на горячий клей. Сделал выемку для забора воды. Решил добавить кусочек алюминиевой перфорации для дополнительной жесткости баллона, так как метал в нем совсем тонкий и легко прогибался при небольших усилиях.

Далее я прикрепил к корпусу прикормочного кораблика крепление двигателя. Делал это таким образом: на дейдвуд прикрепил винт и жесткую муфту. К муфте — мотор, зафиксированный в креплении. После этого я выставил кораблик в таком положении, чтоб дейдвуд занял максимально вертикальное положение, при этом мотор оказывается в свободном подвешивании.


Осталось нанести немного клея, чтоб зафиксировать правильное положение крепления, а после его остывания, нанести уже количество клея необходимое для надежной фиксации.
Для «руля» в своем рыбацком корабле я использовал пластиковую баночку от корма для аквариумных рыб. Эта баночка, кстати, оказалась разделена перемычками на четыре части. Мне осталось все аккуратно вырезать и разметить для подсоединения к баллону водомета.

Рычаг для поворота сделан из стеклотекстолита толщиной 3 мм. Вырезал приблизительную форму, а потом вытесал напильником и наждачной бумагой выемку по форме баночки от корма.

Взял спицу от зонтика (толщина 2 мм.) и продел ее во влагозащитный пыльник для тяг (33х12мм).


Конец спицы загнул под углом 90 градусов и завел в сервопривод SG-90.

Электрическая схема
Все остаются на местах и никто никуда не убегает. Боятся нечего. Ниже приведена полная электрическая схема рыболовного катера. Схема большая, потому что детальная, но сейчас все станет понятно.
Пунктирными линиями выделены отдельные блоки. Некоторые из них вы можете вообще не использовать, а некоторые заменить недорогим купленным аналогом. Лишь одна схема может показаться вам сложной, но вам даже не нужно ее понимать, а спаять при желании можно и то, чего не понимаешь.

Загрузить и скачать схему в большом формате можно
Итак, управление будет реализовано с клавиатуры таким образом:

А в таблице ниже вы можете видеть какой пин на Ардуино Уно отвечает за какую команду. Слов пин, ардуино, скэтч тоже боятся не стоит дальше все детально расcкажу. В столбце «Через:» указаны реле которые срабатывают при нажатии на определенную клавишу телефона.

Схема ДТМФ декодера проста в реализации всего 3 резистора и 1 конденсатор. Я смог все это поместить в штекер мини-джек.

Дальше немного сложнее. Речь пойдет о схеме Ардуино Уно, Ардуино Нано и реле для плат Ардуино. Но все же, схема нарисована детально. И большинство связей однотипны. К примеру, реле К1а-К6а — это реле для Ардуино с питанием 5 В. К каждому реле подходит три провода: +5В, GND (2 провода для питания) и сигнальный.
Когда телефон принимает ДТМФ сигнал (допустим, нажатие клавиши «3»), он передает его через входной пин А0 на плату Ардуино Уно. Там происходит мгновенное превращение этого сигнала в сигнал управления, который подаетя на нужный исходящий пин, например, пин 6, и реле К3а срабатывает, запуская тем самым схему для включения режима «Малый вперед».

Вторая плата — это Ардуино Нано. Она используетя исключительно для поворотов. Входящими сигналами для Ардуино Нано служат исходящие сигналы с 7,8,9 пинов Ардуино Уно. Но перед входом на плату Ардуино Нано, эти сигналы инвертируются посредством оптореле OR1-OR3 с логической единици на ноль с соответственно с ноля на единицу.
Эта сложность обусловлена тем, что скетч для поворотов работает без сбоев только в таком порядке. Вот и все; разбор этой схемы закончен.
В наличии были оптореле КР293КП9А. Блок из оптореле выглядит вот так:


В этом блоке их три. Самый маленький и простой — это стабилизатор на 9 В. Он называется LM7809. Он дает на выходе ровно 9 вольт, которыми запитываются Ардуино Уно и Ардуино Нано.

Два регулятора используются для того, чтоб выставить комфортную скорость «Полный ход» и «Малый ход». Во-первых, для режима «Полный ход» можно обойтись без регулятора и просто запитать мотор в этом режиме напряжением от аккумулятора. Так даже повысится надежность системы. Во-вторых, такие регуляторы можно попросить спаять кого-то, кто не боится паяльника, если у вас такая фобия имеется. Или, в конце концов, объяснить в магазине радиотоваров, какой мощности мотор, каким напряжением вы хотите запитать, и вам подберут регулятор.
Схема управления мотором:
Схему управления мотором решил делать на реле. Связано это в первую очередь с тем, что они у меня были в наличии.
Лукавить не стану. Для неподготовленных людей эта схема сложная. Но я вам расскажу хотя бы для чего она создана. Возможно, многим станет понятно и то, как она работает.
Далее, одна и та же схема представлена в двух видах: первый — более удобен для монтажа, а второй — для анализа, как работают блокировки. Блокировки сделаны таким образом, что когда включен задний ход, невозможно включить ни малый, ни полный вперед.
Когда кораблик плывет вперед невозможно включить задний ход. Для смены направления необходимо остановить кораблик нажатием на клавишу «0». Главная идея этих блокировок: не создавать перегрузов электрической цепи. При этом, на ходу можно без проблем переключать малый и полный вперед.


На плату поместил реле и клемники. Так выглядит монтаж релейной схемы:

К клемникам припаял выходы с контактов и катушек реле. Обязательно на катушки реле устанавливать диоды. Синие варисторы (2 кружочка) ставить не обязательно.

Согласно схемы соединил контакты реле и питания между собой. Весь этот процесс абсолютно авторский. Я гнался за миниатюризацией. Сделал так. Вы можете сделать более громоздко, но более аккуратно.

Схема выгрузки
Принцип выгрузки прост: даем сигнал на ардуино, срабатывает электрозамок, освобождается бункер с прикормкой и оснасткой. Электрозамком является простой соленоид на 24В от подачи бумаги в лазерном принтере.

Чтоб сила втягивания была больше, я решил повысить напряжение с аккумулятора до 30 В.. Делается это с помощью простого китайского девайса МТ3608, купленного на AliExpress.

Тумблеры, вольтметры и габариты.
Тут схемы радуют глаз своей простотой и дотупностью. Габариты можно реализоввать просто прикрепив на ручку рыболовного кораблика велосипедный фонарь.

Закончу рассказ об электронике такой вот схемой аварийной остановки
:

Создана она для того, чтоб при случайном пропадании мобильной связи на рыбалке рыболовный катер не уплыл за горизонт или в камыши.
Принцип работы прост: пока снята трубка и телефон (приемник) в режиме разговора, то на микрофоне гарнитуры есть напряжение. Его можно использовать для управления оптореле, через нормальноразомкнутые контакты которого будет подаваться напряжение на мотор катера. Если закончить вызов или если пропала сеть, напряжение на микрофоне пропадает, оптореле размыкается и мотор останавливается.

Программирование микроконтроллеров Ардуино
Ардуино — это, если кто не знает, микроконтроллеры для широкой публики. Весьма доступно и просто. Грубо говоря: подключил через USB к компьютеру, загрузил на него скетч (программа, в которой написано, что микроконтроллер будет делать) и все готово. Процесс установки драйверов и программы для загрузки описывать не буду. Все можно взять на сайте A
rduino
.
Если будут вопросы, то в сети полно детальных описаний этого процесса.
В моем прикормочном катере используется две платы Ардуино: одна УНО и одна НАНО.
Для Уно, помимо скетча, вам понадобятся библиотеки.
Загрузить и скачать библиотеку можно
Папку DTMF нужно скопировать в папку C:Program FilesArduinolibraries.
В самих скетчах, после вот такой «//» метки есть комментарии.
А вот сами скетчи:
Для УНО:
#include
int sensorPin = A0;
float n = 128.0;
float sampling_rate = 8926.0;
DTMF dtmf = DTMF(n, sampling_rate);
float d_mags;
char thischar;
int ledPins = { // Массив для 10 PINS / реле.
2, 3, 5, 6, 7, 8, 9, 10, 11, 12 // 4-Pin, используется библиотекой!
};
void setup() {
for (int i = 0; i
pinMode(ledPins[i], OUTPUT); // Весь массив ledPins делаем OUTPUT.
digitalWrite(ledPins[i], HIGH); // Весь массив ledPins делаем HIGH.
}
}
void loop() {
dtmf.sample(sensorPin);
dtmf.detect(d_mags, 506);
thischar = dtmf.button(d_mags, 1800.);
if (thischar) {
digitalWrite(ledPins, LOW);
delay(500);
digitalWrite(ledPins, HIGH);
}
}
Для Нано:
// добавляем библиотеку для работы с сервоприводами
#include
// для дальнейшей работы назовем 12 пин как servoPin
#define servoPin 12
// 544 это эталонная длина импульса при котором сервопривод должен принять положение 0°
#define servoMinImp 544
// 2400 это эталонная длина импульса при котором сервопривод должен принять положение 180°
#define servoMaxImp 2400
Servo myServo;
void setup()
{
myServo.attach(servoPin, servoMinImp, servoMaxImp);
// устанавливаем пин как вывод управления сервоприводом,
// а также для работы сервопривода непосредственно в диапазоне углов от 0 до 180° задаем мин и макс значения импульсов.
pinMode(5, INPUT);
pinMode(6, INPUT);
pinMode(7, INPUT);
myServo.write(1430);
}
void loop()
{
if(digitalRead(5) == HIGH) // Условие 1-й кнопки
{
myServo.write(1130); // Повернуть серво влево на 45 градусов
}
if(digitalRead(6) == HIGH) // Условие 2-й кнопки
{
myServo.write(1430); // Вернуть серво вцентр
}
if(digitalRead(7) == HIGH) // Условие 3-й кнопки
{
myServo.write(1730); // Повернуть серво вправо на 45 градусов
}
}
Крышка (палуба) катера и элементы управления на ней
Материалом для крышки послужил стеклотекстолит толщиной 2 мм.. Приложил корпус рыболовного кораблика к листу стеклотекстолита, обвел маркером контур, и вырезал электролобзиком нужную форму.

Вес крышки получился 590 грамм. Для такой жесткости вполне нормальный результат.


Регуляторы мощности и тумблер для фонаря поместил в емкость от пудры, которую посадил на клей «жидкие гвозди» для полной гидроизоляции.

Для телефона-приемника и вольтметров я использовал внешнюю распределительную коробку.
Также в ней помещаются контакты аккумулятора для заряда АКБ. На тыльной стороне вывел разъем для выгрузки.

Так выглядит прикормочный кораблик с установленной крышкой, но без выгрузки:

Выгрузка прикормки
Принцип выгруза прикормки такой: при подаче сигнала срабатывает соленоид, удерживающий при помощи защелки дно бункера, и оно свободно открывается под своим весом или весом прикормки.
Бункер для прикормки сделал из трех спаренных коробочек для мелких деталей. Дно из двухмиллиметрового текстолита подвесил на самую маленькую петлю, какую смог найти на хозяйственном рынке.

И все это прикрепил на одномиллиметровый уголок из нержавейки.

Кстати, бункеры сделал быстросъемными. Для этого я уголки креплю к катеру на гайки с «ушками», а кабель к соленоидом через разъем.


Вверху уголки (основы бункеров) скрепил ручкой катера, сделанной из алюминиевой трубки диаметром 10мм.. Вес выгрузки составил чуть больше килограмма . Это много, но для моего прикормочного кораблика вполне допустимо.
Мы уже рассказывали о самодельном катере для завоза приманки, в той статье давалась подборка электроники и рассказывалось об изготовлении. Если вы хотите сделать такой катер своими руками, то перейдите на статью Самодельный радиоуправляемый катер для завоза прикормки .
В этой статье мы поговорим о функциях такого радиоуправляемого катера.
Первое, что должен уметь катер – это передвигаться по водоему и сбрасывать груз прикормки.
Фактически, для этого можно доработать практически любой радиоуправляемый катер, установив на него дополнительную сервомашинку, которая мудет опрокидывать короб с рыболовной приманкой.
На видео ниже идет тестирование самодельного катера для рыбалки в ванной.
Кроме завоза приманки, катер можно использовать для завоза крючков удочки или закидушки. Для этого он оборудован двумя «отцепами». Управлять отцепами можно с помощью правого стика на передатчике. Механизация отцепов выполнена с помощью тех же сервомашинок.
Движение правого стика вниз – опрокидывает кузов с прикормкой для рыбы.
Такое управление дает возможность за один заход не только завести приманку, но и крючки в пару разных мест водоема.
Не смотря на достаточно простой вид, такой рыбацкий катер для завоза приманки может очень сильно облегчить рыбалку. При этом его стоимость, при учете того, что корпус корабля изготавливается самостоятельно, не велика. В спец магазинах катера для рыбалки продаются по цене начиная от 800-1000$, а электронику для самодельного катера можно купить за 150$. Ссылки на начинку катера смотрите в статье про изготовление.
На испытаниях катер показал не большую скорость, из за недогруза (испытывался без груза прикормки) винт частично оказывался высунутым из воды и происходило «проскальзвание» винта в воздушно водяной смеси. Тем не менее, это не помешало самодельному рыболовному катеру для завоза приманки заплыть практически за границу видимости на воде.
Кстати. Сделать самодельный катер на радиоуправлении доступно даже ребенку! Посмотрите на видео ниже – двое ребят сделали подобный катер из остатков радиоуправляемого вертолета и потолочной плитки. Как можно увидеть на видео – это не помешало ему отправится в плавание.
Так что, если у вас есть желание иметь рыбацкий катер для завоза приманки, но не хочется платить за него много денег, то вы можете сделать его своими руками!
Еще про радиоуправляемые модели
:
— Делаем квадрокоптер из линеек.
— Изготовление катера для прикормки своими руками.
— Изготовление квадрокоптера из подручных материалов.
— Делаем модель радиоуправляемой яхты за один вечер.
— Как сделать простую радиоуправляемую модель самолета.
— из такого конструткора можно собирать самодельные радиоуправляемые модели автомобилей.
Коля комментирует:
Весьма интересно. Надо будет попробовать сделать такой катерок. Не для рыбалки, а так, погонять по водоему.
Радиоуправляемый катер для рыбалки — это настоящая находка, которую может соорудить любой мастер собственными руками. С его помощью осуществляется завоз прикормки на дальние расстояния. Купить такое изделие можно в специализированном магазине, но уже после нескольких походов на рыбалку оно сломается. Естественно, есть очень качественные модели, но их стоимость тоже впечатляет. Лучше соорудить катер на радиоуправлении самостоятельно, так можно быть уверенным в его исправности, да и запчастей понадобится немного.
Нельзя сказать, что собрать такое небольшое судно очень уж просто. Но если соблюдать инструкцию, то для изготовления самоделки понадобится всего день.
Для начала следует собрать необходимый материал и инструмент:
- стеклопластик, фанера или другой материал, из которого можно будет вырезать корпус кораблика;
- силовой каркас из алюминиевого профиля;
- горячий клей (или другое средство для фиксации частей, которое будет устойчивым к воздействию воды);
- монтажная пена;
- двигатель;
- регуляторы;
- аппаратура для осуществления управления корабликом;
- аккумулятор, благодаря которому будет работать моторчик;
- провода и разъемы для подключения и соединения всех компонентов схемы;
- паяльник;
- дейдвудная труба;
- вал с винтом, благодаря которому будет осуществляться передвижение катера;
- ножовка или электролобзик.
Конструкция аппарата может быть абсолютно любой. Главное, чтобы она была действенной. Для этого важно правильно рассчитать водоизмещение этого маленького судна.
Вообще, такая небольшая лодка считается настоящей находкой, ведь рыбаку не придется думать, как доставить прикормку на большое расстояние. Кроме того, к ней можно прикрепить эхолот и обследовать водоем в поисках наиболее рыбного места.
Радиоуправляемый кораблик для рыбалки своими руками сделать нетрудно, нужно просто соблюдать последовательность выполнения работ:
- Изготовление корпуса. Если используется фанера, то дополнительно придется облицевать ее стеклотканью и обмазать эпоксидной смолой. Это поможет защитить материал от гниения. Вырезать фанеру или стеклопластик необходимо по предварительно нарисованной или скачанной схеме. Для того чтобы герметизировать все швы, необходима монтажная пена.
- Установка силового каркаса. Благодаря ему нагрузка на корпус распределяется равномерно, и он остается на плаву. Нос кораблика можно заполнить пеной, которая гарантирует его непотопляемость.
- Монтаж трубы с винтом. Лопасти движущего компонента остаются внутри корпуса, поэтому они не запутаются в водорослях, не поранят рыбу, а также не зацепятся за корягу. Отверстие трубы дополнительно нужно закрыть решеткой.
- Обустройство электронной части. Вот теперь устанавливается двигатель, дейдвудная труба, вал с муфтой и гребной винт. Чтобы рыболовный катер мог плыть в заданном направлении и поворачиваться, нужно оснастить его регуляторами.
- Монтаж серводвигателей для открывания емкостей с прикормкой. Они должны находиться в корпусах, внутрь которых не попадает пыль и влага.
- Установка аккумуляторов.
Для управления изделием лучше выбрать пятиканальную радиосистему, которая устанавливается на игрушки.
Как видно, кораблик для рыбалки своими руками делается быстро.
Кроме того, есть другие полезные рекомендации, которые помогут не только самостоятельно сконструировать изделие, но и сделать его долговечным:
- лучше выбрать не фанеру, а стеклопластик, ведь он гораздо легче и не требует дополнительной защиты от влаги, так как не поддается ее негативному воздействию (этот материал также отличается высокой прочностью);
- выбранный аккумулятор должен обладать достаточной емкостью, чтобы катер не заглох посреди водоема, но также важно обратить внимание и на вес компонента (он не должен слишком сильно утяжелять конструкцию);
- катер можно дополнительно оснастить подсветкой, навигатором — это даст возможность осуществлять ночную ловлю;
- для того чтобы изделие не ушло под воду, необходимо правильно рассчитать водоизмещение, которое колеблется в пределах 2,5-12 литров (тут влияет расстояние, на которое уплывает судно, количество подкормки, масса необходимого оборудования).
Ловля рыбы при помощи радиоуправляемого катера — настоящее удовольствие. Но чтобы кораблик уплывал на дальние расстояния, система управления должна быть рассчитана на это. Радиус ее действия не должен быть меньше 50 м.
Радиоуправляемый катер своими руками на Ардуино сделать очень просто — это идеальный проект для начинающих. Подробно рассмотрим технологию изготовления корпуса катера, представим электрическую схему подключения моторов и блютуз модуля к Arduino UNO. Смотрите также видео ролик, где продемонстрирована возможность использования катеров на Ардуино для соревнований «Морской бой».
Видео. Радиоуправляемые катера на Ардуино
Катер собран на Ардуино UNO, но можно использовать и другие микроконтроллеры, например, RobotDyn NANO . Управление производится через Bluetooth модуль HC-05. Для этого была написана простая программа для телефонов на Android в сервисе App Invertor. Подробную инструкцию по изготовлению катера, схему сборки, скетч для Ардуино и приложение для Android вы можете скачать на этой странице.
Как сделать радиоуправляемый катер
Для этого проекта нам потребуется:
- плата Arduino UNO;
- два мотора 5В;
- аккумулятор на 9В (крона);
- 2 транзистора и резисторы;
- кусок пеноплекса 50 мм;
- фанера 3-4 мм, линолеум, пластик;
- паяльник, термопистолет, канцелярский нож;
- клеммник, провода и изолента.
Если вы будете использовать моторы от наборов Ардуино, то транзисторы не понадобятся. В данном проекте использовались советские моторчики на 3,5 В, которым не хватает Ампер от пинов на плате, поэтому моторчики подключались к порту Vin (источник питания платы), через резистор, чтобы снизить напряжение. Включение и выключение моторов постоянного тока производится через транзисторы.
Изготавливаем катер на Ардуино своими руками
Для начала необходимо изготовить корпус для катера из куска пеноплекса толшиной 50 мм. В пеноплексе необходимо вырезать полости, где потом будет размещаться микроконтроллер, аккумулятор крона и моторы. На фото представлен вид катера до монтажа на корпусе моторов и электрической «начинки» проекта для начинающих. Скачать и распечатать шаблон катера вы можете на этой странице далее.
Далее необходимо разместить всю «начинку» в корпусе катера. Чтобы защитить микроконтроллер и все модули от попадания брызг воды, поверх корпуса укладывается лист линолеума, вырезанный по габаритам пеноплекса. Поэтому необходимо делать достаточной глубины вырезы в пеноплексе для установки кроны и платы Arduino. Схему подключения Bluetooth модуля и моторов к плате Ардуино смотрите далее.
Скопировать готовый скетч для катера на Bluetooth управлении можно далее. Для создания приложения на Андроид использовалась программа App Inventor. Скачать скетч для катера на Ардуино, файл с приложением для Androida и шаблон катера можно скачать одним архивом . Приложение сохранено в формате .aia
, файл необходимо открыть в ai2.appinventor.mit.edu и скачать на телефон через QR-Code Reader.
int
val; // освобождаем память для переменой
#define
M1
12 // порт левого мотора
#define
M2
10 // порт правого мотора
void
setup
()
{
Serial
.begin
(9600); // подключаем последовательный порт
pinMode
(M1
, OUTPUT
); // назначаем режим работы 12 порта
pinMode
(M2
, OUTPUT
); // назначаем режим работы 10 порта
}
void
loop
()
{
if
(Serial
.available
()) // проверяем, поступают ли команды
{
val = Serial
.read
(); // переменная val равна полученной команде
if
(val == «1»
) { // едем прямо
digitalWrite
(M1
, 1);
digitalWrite
(M2
, 1);
}
if
(val == «2»
) { // стоп
digitalWrite
(M1
, 0);
digitalWrite
(M2
, 0);
}
if
(val == «3»
) { // едем налево
digitalWrite
(M1
, 0);
digitalWrite
(M2
, 1);
}
if
(val == «4»
) { // едем направо
digitalWrite
(M1
, 1);
digitalWrite
(M2
, 0);
}
}
}
В отличии от лодки на Ардуино , где для передвижения использовался один мотор с винтом, в данном проекте используется два мотора и гребное колесо. При этом отпадает необходимость использовать сервопривод, который потребляет большое количество энергии, для изменения направления движения. Повороты катера осуществляются попеременным включением моторов по Блютуз сигналу.
Для изготовления гребного колеса использовалась обычная фанера и пластик. Диаметр колеса следует выбрать такой, чтобы лопасти доставали до воды. Сами лопасти вырезаются из ПЭТ бутылки, вставляются в прорези на колесе и фиксируются термоклеем. Также вы можете покрасить гребные колеса, защитив фанеру от разбухания в воде, а пеноплекс от краски на основе ацетона только разъест.
Современные производители рыболовных приспособлений делают постоянные шаги вперед и предлагают любителям порыбачить все новые, более уникальные снасти. Главным преимуществом рыболовных корабликов является то, что они значительно ускоряют и совершенствуют процесс ловли рыбы. Вы тоже хотели бы опробовать это приспособление в деле? У вас есть два варианта: купить прикормочный кораблик в магазине или попробовать сделать радиоуправляемый катер своими руками.
Самодельный радиоуправляемый катер можно эксплуатировать на протяжении всего рыболовного сезона, с лета и до начала холодов. Особенно прочные и мощные модели подойдут также для раскладывания приманки в зимний период на сложных водоемах с сильным течением.
Радиоуправляемый кораблик для рыбалки своими руками поможет вам приманивать и вылавливать такую рыбу, как щуку, голавля, жереха, густера, окуня, карпа и многих других. За счет небольшого веса и мощного двигателя такие кораблики быстро доставляют прикормку в нужное место. Благодаря же возможности полностью контролировать местонахождение корабля на воде расстановка прикорма максимально точна.
Большой плюс, который получает рыбак, решивший изготовить радиоуправляемый катер для рыбалки своими руками, — возможность рыбачить в любых обстоятельствах. Известно, что на доставку прикормки с помощью рогатки или ракеты уходит большое количество времени и сил, к тому же при плохих погодных условиях эти методы не всегда работают слаженно. Радиоуправляемый катер своими руками способен преодолевать трудности в виде течения или растительность, развивать высокую скорость и маневрировать, транспортировать прикормку для рыбы на большие дистанции.
Вместе с тем современный катер на радиоуправлении для рыбалки своими руками применяется не только для доставки прикорма, но и для транспортировки снастей и расставления мушек. Труднодоступные места и непроходимые заросли, которые раньше мешали рыбаку добраться до рыбы и поймать ее в сети, сегодня уже не преграда. Радиоуправляемый кораблик своими руками способен быстро и качественно моделировать свой маршрут, огибать препятствия на пути, сканировать водоем на предмет наличия рыбы и даже расставлять маркеры, которые позволят легко ориентироваться и оформлять зону поклева в дальнейшем.

Как устроен радиоуправляемый катер своими руками
Независимо от сложности модели и мощности агрегата радиоуправляемый катер для рыбалки своими руками работает по похожему принципу, отличаясь лишь некоторыми дополнительными деталями и характеристиками.
Форма кораблика , независимо от его мощности, имеет правильную геометрическую форму, что позволяет конструкции прочно удерживаться на воде и балансировать даже при сильном течении и порывах ветра.
Изучая чертежи радиоуправляемого катера своими руками, вы убедитесь, что нижняя часть кораблика утяжеляется специальной пластиной, которая не дает ему затонуть в процессе транспортировки прикормки.
С задней стороны радиоуправляемый катер своими руками оборудован специальной емкостью для прикорма. Размеры бункера для корма могут отличаться, в зависимости от модели и предназначения кораблика. Некоторые бункеры для прикормки оборудованы клапанами, которые открываются по команде рыбака в наиболее выгодное время и в пригодном для приманки рыбы месте.

Главным движущим элементом кораблика является двигатель. Он отвечает за развитие скорости, маневренность и количество возможных транспортировок прикормки к месту поклева. Важно помнить о том, что радиоуправляемые модели катеров своими руками оснащаются подходящими двигателями, который влияет не только на работу гаджета, но и на его грузоподъемность и способность балансировать на воде. Не стоит приобретать небольшие модели корабликов и большие моторы, поскольку таким образом вы усложните работу своему агрегату.
Аккумуляторы предназначены для передачи электрической энергии двигателю и приведения снасти в движение. От размера батареи зависит продолжительность и эффективность работы кораблика.
Некоторые модели корабликов оборудованы специальным устройством под названием эхолот. Функция эхолокации позволяет с легкостью сканировать дно в процессе транспортировки прикорма и подавать на экран пульта управления информацию о количестве рыб под водой, наличии неровностей дна, месте прикорма и особенностях рельефа.
Кораблик для прикорма своими руками
Как сделать радиоуправляемый катер для рыбалки своими руками? Несмотря на большое количество современных моделей водяных змеев от производителей кораблик можно сконструировать своими руками. Самостоятельное изготовление подходит для случаев, если вы не планируете частые вылазки на рыбалку и не являетесь большим поклонником новомодных приспособлений для вылова рыбы. К радости тех, кто интересуется тем, как сделать радиоуправляемый катер, конструкция самодельных корабликов достаточно примитивна и собрать ее не составит много труда.

Из материалов для изготовления водяного змея вам понадобятся:
- Доски из легкого дерева (яблоня, груша). Такой материал является достаточно прочным и в то же время хорошо держится на воде. Эти качества очень важны, так как позволят сделать кораблик маневренным.
- Алюминиевые пластины. Обязательный участник любой инструкции, как сделать радиоуправляемый катер своими руками, которые помогут собрать корпус в единое целое и достаточным образом его утяжелить. Благодаря алюминиевым пластинам прикормочная лодка для рыбалки приобретает способность справляться с течением на водоеме.
- Рыболовная леска и катушка. Поскольку самодельные кораблики не оснащены мощным двигателем и балансирующими деталями, руководить ими на воде придется с помощью лесок и катушек. Без них радиоуправляемый катер своими руками не сможет качественно функционировать.
- Элементы крепления. Помогут вам прочно закрепить детали и быть уверенными в том, что ваш агрегат справится с доставкой прикорма и снастей на выбранном вами водоеме.
- Поводки. Элементы крепления, которые способны фиксировать леску натяжения в нужном положении и помогать в процессе растягивания приманок и мушек.
- Спиннинг. Помогает руководить корабликом и следить за его движением на воде, особенно если рыбалка производится на водоеме с сильным течением.
Что использовать в процессе приманки и вылова рыбы?
- Прикорм с феромонами. Часто используется в процессе вылова крупной рыбы на трофейной или спортивной рыбалке. Корм содержит определенные микроэлементы, которые провоцируют выработку у рыбы гормонов и привлекают ее внимание. Биологически активные вещества качественно увеличивают количество улова и уменьшают время на затравку и привлечение рыбы к месту поклева.
- Мушки. Наиболее распространенные детали для привлечения рыбы, которые воздействуют на потенциальную добычу внешним видом, имитируя движение живых насекомых. Существует большое количество разновидностей мушек, которые выбираются в зависимости от особенностей водоема и типы рыбы, которую вы планируете поймать. В магазинах можно найти мушки в форме стрекоз, бабочек, тараканов, мух и пауков. Выбирая мушки, вы должны помнить о том, что в коллекции рыболова должен быть запас различных видов мушек, которые стоит чередовать в процессе раскладывания приманки. Мелкие мушки привлекают мелкую рыбешку, которая в свою очередь может стать живой приманкой для более крупной добычи.
- Живая приманка. Используется для привлечения крупной рыбы на больших водоемах. В зависимости от типа рыбы, которая вас интересует, можно приобрести различную живую приманку или заготовить ее самостоятельно. При самостоятельной заготовке живой приманке необходимо обязательно учитывать сезон рыбалки и гастрономические предпочтения рыбы. Так же, как и с мушками, важно предусмотреть наличие различного типа прикормки, чтобы иметь возможность моделировать способы вылова и оптимизировать весь процесс.
Особенности рыбалки корабликом ручного производства
Кораблики, которые изготавливаются своими руками, имеют некоторые особенности. Их важно учитывать, планируя расположение прикорма и заготавливая принадлежности для рыбной охоты.
Помните, что для кораблика ручной работы подходят открытые водоемы с относительно спокойной водой. Стремительное течение или чрезмерная растительность могут помешать процессу растяжки лески и расположению приманки.
Обращайте внимание на берег, с которого запускаете кораблики. Помните о том, что большая растительность на берегу может также помешать движению агрегата по воде. Просчитывайте маршрут радиоуправляемого катера для прикормки так, чтобы исключить любую вероятность зацепления лески.
Скорость проводки и расположения приманок с корабликов ручной работы должна быть средней, чтобы не вспугнуть косяк рыбы и не испортить назначенное место для поклева.
Двигаться в процессе проводки кораблика нужно от истока водоема, чтобы не отбрасывать тень на воду и не пугать рыбу. Одновременно это необходимо для того, чтобы всегда иметь возможность видеть кораблик и вовремя корректировать его движения при течении или начале поклева.
В последнее время большое развитие радиоуправляемых моделей и беспилотников привело к тому, что они внедрились в очень неожиданные сферы, включая рыбалку и охоту. Лодки на радиоуправлении приобретают для перемещения прикормки в труднодоступные и отдаленные участки водоема, при этом не распугивая рыбу веслами или лодочным мотором.
Тяжелые используются для ловли на блесну и троллинга даже больших хищников, к примеру, судака и щуки. Несколько дронов распределить можно по самым перспективным местам лова, при этом их контролировать удаленно при помощи планшета или смартфона. Радиоуправляемый с эхолотом быстро проведет разведку самых перспективных мест лова.
Солнечные батареи и автопилот позволяют игрушку превратить в полноценный беспилотник, который может помогать рыбаку в автономном режиме в течение всего дня.
Преимущества
Радиоуправляемый катер для рыбалки имеет прочный корпус. Он отличается хорошей устойчивостью на волнах. Им можно с легкостью управлять с помощью пульта, телефона или планшета, как уже говорилось выше. Наличие двух моторов кораблик делает очень маневренным, при этом позволяет ему перемещаться в любом направлении, при этом благодаря светодиодам, которые расположены на корпусе, вы хорошо сможете увидеть катер ночью и в сумерках даже на большом расстоянии.
Огромное количество рыболовов уже смогли оценить преимущества, которыми наделены радиоуправляемые модели катеров: приобрести его, значит обеспечить себе множество выловленных трофеев и комфортную рыбалку.

Возможности катеров
Катер радиоуправляемый может поворачивать во всех направлениях и плавать по прямой, бороздя водные просторы. Его очень прочный корпус обтекаемой формы, с легкостью скользит по глади воды, при этом уверенно выдерживает все случайные столкновения.
Стоит отметить, что радиоуправляемые модели катеров покорно слушаются хозяина, пока они находятся в поле действия. Покинув его, катер продолжает какое-то еще время выполнять полученную последней команду. Потом отключается и может запросто уплыть. Следовательно, следует с осторожностью отправлять его в длительное плавание.
Если вы захотели купить катер радиоуправляемый, и желаете, чтобы он был быстрым, мощным и вас слушался беспрекословно, то не следует экономить. Стоимость лодки зависит напрямую от его свойств: чем выше дальность действия и скорость, тем больше будет цена.
Виды
Катера отличаются расцветками, размерами, комплектациями, типом управления. Существует 2 вида пультов: инфракрасные и радиопульты. Катер радиоуправляемый с радиопультами будет стоить дороже, так как радиус действия имеет фиксированный, при этом инфракрасное управление подвержено освещению. У таких моделей радиус действия при ярком свете сокращается, при этом ночью показывает прекрасный результат.
Есть модели, которые могут на суше включаться, вторые снабжены специальными предохранителями, при этом лишь при попадании в воду начинают работать.

Места запуска
До того как купить катер радиоуправляемый, нужно определиться, где вы собираетесь его применять. Маленькие лодки отлично подходят для плавания в спокойных прудах, тихих речках и бассейнах. Их можно запускать при желании даже в ванной, но здесь они продемонстрировать свои возможности не смогут.
Мощные и крупные модели нужно использовать в открытых больших водоемах: озерах, прудах, реках, только желательно без настоящих плавсредств, сильного течения и волн.
Погони за водными птицами, крутые виражи и соревнования на скорость — это еще не все возможности таких моделей.
Недорогой радиоуправляемый катер
Подыскивая недорогую модель, обратите свое внимание на радиоуправляемый катер Speed Racing. Это дистанционно управляемая лодка, предназначенная для прикормки рыбки. Она обеспечивает завоз приводы или прикормки на расстояние до трехсот метров с маленьким уровнем шума. Низкая посадка и защита винтов дает возможность заплывать в самые густые заросли, в которые невозможно забраться, не распугав рыбу, даже на тихой резиновой лодке.
Такое беспилотное судно оснащается подсветкой сверху (это необходимо для визуального контроля), а также снизу (специально для дополнительного привлечения крупной рыбы, к примеру, сомов). Также стоит отметить, что камера с передачей картинки в реальном времени (FPV) способствует удобству управления. Расположенный на борту эхолот дает возможность проводить быстро разведку наличия рыбы в любых интересующих участках водоема.
Катер или катамаран с эхолотом
На сегодняшний момент имеется огромный выбор компактных недорогих эхолотов, которые позволяют получить представления об отдельных особях рыб и их косяках в любых интересующих местах. При этом на более дорогих лодках изображение с эхолота попадает напрямую на пульт, в то время как на более бюджетных версиях картина с экрана фиксируется камерой, расположенной на борту, после чего по видеоканалу передается хозяину.

Скоростной катер
Для рыбалки на блесну при помощи беспилотного катера судно должно быть обязательно достаточно тяжелым и мощным, чтобы большая рыба, такая как сом или щука, не смогли утащить лодку. В обратном случае за ней придется носиться по всему водоему, в большинстве случаев безуспешно.
Судно с автопилотом
Такой автопилот дает возможность без участия оператора в автономном режиме прочесывать реки при наличии автопилота. Кроме того, доставлять прикормку в заданные заранее точки в автоматическом режиме.
Катер на солнечных батареях
Стоит сразу сказать, что время плавания китайских недорогих корабликов не превышает двух часов при непостоянной работе мотора, далее его нужно заряжать, после чего возвращать для их замены. Солнечные батареи дают возможность бортовые аккумуляторы заряжать быстро и использовать беспилотное судно целые сутки.
Катера с радиоуправлением
Опытные рыбаки предпочитают иметь дело с лодками более продвинутыми и совершенными — скоростными с радиоуправлением. Такие модели имеют ДВС, а также в открытом водоёме могут развивать огромную скорость. В основном такие катера выполняются крупных размеров, что позволяет устанавливать достаточно мощный двигатель. Для производства любого элемента для подобного катера применяют только высокопрочные материалы.
Парусник с радиоуправлением
К следующему виду моделей подобных катеров относится простой Он отличается от остальных моделей тем, что не имеет вообще на борту двигателя.
Чтобы такая начала двигаться, ей необходим ветер, при этом дистанционное управление — исключительно для направления движения. Это уже достигается поворотом штурвала в необходимую сторону. Такой моделью может управлять и опытный человек, хотя в основном им отдают предпочтение профессионалы — в таком случае существует огромная зависимость от ветра и погодных условий в целом.

Модель на воздушной подушке
Данный транспорт невероятно популярен. Он относится к водному и наземному. Такая лодка на подушке из воздуха в состоянии двигаться по воде и по суше одинаково легко. По сути, это вездеход, для него не существует преград.
У модели на воздушной подушке имеется та же юбка из резины, как и у прототипа — имеется вентилятор, который под днище закачивает воздух, за счет чего лодка способна подняться над землёй или водой и перемещаться при помощи вентилятора, установленного у нее сзади. Для моделей с такими подушками в основном необходима вода или ровная поверхность.
Подводные лодки
Имеются и подобные модели с радиоуправлением. Здесь погружение происходит при помощи вентиляторов или балластной системы методом выкачивания и закачивания воды из отсеков.
Такая лодка с радиоуправлением в основном необходима, чтобы в каком-то маленьком водоёме производить погружение. Вода здесь должна быть прозрачная и чистая — в бассейне или аквариуме.

Радиоуправляемый катер своими руками
Для начала нужно отыскать источник питания. Аккумулятор подойдет для такой функции. Найдите модель с относительно небольшим весом и большой мощностью. Чтоб аккумулятор наше судно не потопил, необходимо установить надежные двигатели. При этом настройка удаленного управления требует навыков и специальных знаний.
Изготовить такую модель для завоза прикормки — задача не из простых, даже если у вас есть чертеж радиоуправляемого катера. Подобная идея финансово затратная, поскольку необходимо приобрести материал для корпуса, двигатель, аккумулятор, систему радиоуправления. Иногда приобретение игрушечного кораблика будет экономней в специализированном магазине, чем самостоятельная сборка. Кроме того, нужно учитывать, что в моделях от знаменитых производителей уже имеется навигация и подсветка.
В случае если вы решили своими руками соорудить конструкцию, позаботьтесь приобрести пятиканальную систему, необходимую для удаленного управления. Идеальный показатель дальности, необходимый для рыбалки, составляет пятьдесят метров.

Радиоуправляемые катера: отзывы
Читая отзывы о данных моделях можно узнать, что при необходимости каждый сможет подобрать катер для своих целей и под свои запросы. А вот те, кому интересно собрать такую смогут сделать это и самостоятельно, особенно если учитывать, что сегодня совсем несложно приобрести необходимые детали.
cthutq 27-05-2018, 02:47 5 446 Моделирование / Суда и корабли


 Всем доброго времени суток дорогие друзья! В сегодняшней статье я бы вам хотел вам показать, как сделать лодку на радиоуправлении. Эта самоделка отлично подойдет для тех, кто хочет заняться лодочным моделизмом, но модели лодок стоят довольно дорого. Собрать свою модель будет не намного дешевле, но куда интереснее, чем просто купить готовую лодку в магазине. Ну да ладно, хватит длинных предисловий, погнали!
Всем доброго времени суток дорогие друзья! В сегодняшней статье я бы вам хотел вам показать, как сделать лодку на радиоуправлении. Эта самоделка отлично подойдет для тех, кто хочет заняться лодочным моделизмом, но модели лодок стоят довольно дорого. Собрать свою модель будет не намного дешевле, но куда интереснее, чем просто купить готовую лодку в магазине. Ну да ладно, хватит длинных предисловий, погнали!
- И так, для данной самоделки нам понадобится:
- — электроника от старого радиоуправляемого вертолёта.
- Из инструментов нам также понадобится:
— лист ABS пластика.- электродвигатели 180 класса 2шт.- лодочные пропеллеры.- переходник для вала электродвигателя.- электроды подходящего диаметра.- алюминиевые трубки, внутренний диаметр которых равен внешнему диаметру электродов.- 2s 7.4v Lipo аккумулятор.- немного провода.- алюминиевая пластина.- винты.- Линейка.- маркер.- канцелярский нож.- терма клей.- дрель.- отвёртка.- плоскогубцы.- смазка.- паяльник.Для начала нам потребуется сделать корпус самой лодки. В качестве материала для корпуса лучше всего взять толстые листы ABS пластика. На листе пластика при помощи линейки и маркера следует отметить прямоугольник длиной 25см и шириной 11.5см.


 После того как прикинули размеры на листе пластика, следует поделить верхнюю часть на прямоугольники, так как это показано на фото ниже. Это нужно для того чтобы более симметрично начертить нос нашей лодки. И пытаемся как можно точнее сделать нос лодки, но если у вас не получится, то можно скачать и распечатать фотошаблонов в интернете.
После того как прикинули размеры на листе пластика, следует поделить верхнюю часть на прямоугольники, так как это показано на фото ниже. Это нужно для того чтобы более симметрично начертить нос нашей лодки. И пытаемся как можно точнее сделать нос лодки, но если у вас не получится, то можно скачать и распечатать фотошаблонов в интернете.
 С помощью канцелярского ножа отрезаем прямоугольник и отрезаем от прямоугольника лишнее. Так чтобы у нас получилось, что то похожее на лодку. Затем тем же канцелярским ножом делим нашу заготовку пополам.
С помощью канцелярского ножа отрезаем прямоугольник и отрезаем от прямоугольника лишнее. Так чтобы у нас получилось, что то похожее на лодку. Затем тем же канцелярским ножом делим нашу заготовку пополам. Канцелярским ножом срезаем угол на заготовках, которые только что получили. Это нужно для того, чтобы их можно было максимально плотно склеить под углом.Затем срезаем две заготовки так, чтобы у вас получилось, так как на фото ниже.Наносим терма клей на заготовки и склеиваем их между собой. Из того же пластика следует вырезать две заготовки похожие на трёх угольники. И приклеиваем их к лодке для того чтобы усилить корпус. На протяжение всей сборки корпуса старайтесь не жалеть терма клей и проклеивать все очень хорошо, это нужно для герметичности всей конструкции.Наносим терма клей на указанное место и сгибая пластик склеиваем два конца между собой.Из используемого пластика следует вырезать две полоски такой шириной, чтобы они были не выше задней стенки. И приклеиваем на те места, что указаны на фото.Для следующего шага нам нужно изготовить некую «мотораму» на которой будут крепиться электродвигатели. Для моторамы нам понадобится какая-нибудь металлическая пластина, автор самоделки решил вырезать её из алюминиевого профиля. Пластина должна помещаться в лодку так чтобы она там не болталась. На самой алюминиевой пластине следует высверлить два больших отверстия для валов электродвигателей и четыре маленьких для крепления электродвигателей.Закрепляем электродвигатели на пластине. Крепиться электродвигатели к пластине будут при помощи винтового соединения. После чего на валы электродвигателей устанавливаем переходники.Берём нашу мотораму с электродвигателями и приклеиваем её в заднюю часть лодки так, чтобы расстояние между задней стенкой и переходником составляло 1-2 см. Для следующего шага нам понадобится электрод. Электрод в данной конструкции будет осью привода, для этого нам надо убрать изоляцию с электрода. Убирать изоляцию с электрода очень удобно пассатижами. После того как убрали изоляцию с электрода нужно проверить влезет ли он в заранее заготовленную трубку, если да, то продолжаем.Взяв пассатижи, делим электрод на две одинаковые оси. Длина осей должна быть чуть больше трубок. Затем надеваем лодочные пропеллеры на оси так, чтобы крутились они в разные стороны, и через трубки вставляем их в лодку. Но перед тем как вставить оси в лодку, в задней стенке следует проколоть два отверстия для них.Места, где были проделаны отверстия и просунуты трубки, следует загерметизировать терма клеем, для того чтобы вода не попадала туда.Сняв оси с пропеллерами, следует промазать какой-либо смазкой трубки, где они стоят. Если не смазывать то в трущихся местах будет сильный нагрев, что приведёт, к расширению метала, увеличению сопротивления, что в свою очередь может повлиять на нагрузку электронной системы лодки.Припаиваем провода к электродвигателям. А провода от электродвигателей припаиваем к плате управления вертолета, где были припаяны вертолётные двигатели. Про полярность не сказать не чего, она подбирается методом тыка. Главное чтобы после включения при добавлении газа электродвигатели вращались в противоположные стороны, а лодка двигалась вперёд. А при повороте на право, левый двигатель добавлял обороты, а левый сбавлял. Приклеиваем аккумулятор к корпусу терма клеем. Вырезав квадратик из используемого материала, приклеим и его с помощью терма клея к плате управления и этот бутерброд нужно приклеить также к корпусу. Изготовим крышу для лодки, повторяя действия по пошаговым фото. И украсим лодку тем, что у вас есть.В крыше следует проделать прямоугольное отверстие для зарядки и ремонта. И с внутренней стороны следует приклеить не большие квадратики для того чтобы крышка не проваливалась вовнутрь.Из используемого материала следует вырезать полозья для более стабильного и более управляемого движения. И приклеиваем их при помощи терма клея.Все готово! В итоге у нас получилась очень интересная модель радиоуправляемой лодки. Лодка получилась очень быстрой и на удивление манёвренной. Данная самоделка наверняка понравится многим и многие обязательно захотят сделать себе такую же лодку.Вот подробное видео от автора со сборкой и испытанием данной самоделки:
Канцелярским ножом срезаем угол на заготовках, которые только что получили. Это нужно для того, чтобы их можно было максимально плотно склеить под углом.Затем срезаем две заготовки так, чтобы у вас получилось, так как на фото ниже.Наносим терма клей на заготовки и склеиваем их между собой. Из того же пластика следует вырезать две заготовки похожие на трёх угольники. И приклеиваем их к лодке для того чтобы усилить корпус. На протяжение всей сборки корпуса старайтесь не жалеть терма клей и проклеивать все очень хорошо, это нужно для герметичности всей конструкции.Наносим терма клей на указанное место и сгибая пластик склеиваем два конца между собой.Из используемого пластика следует вырезать две полоски такой шириной, чтобы они были не выше задней стенки. И приклеиваем на те места, что указаны на фото.Для следующего шага нам нужно изготовить некую «мотораму» на которой будут крепиться электродвигатели. Для моторамы нам понадобится какая-нибудь металлическая пластина, автор самоделки решил вырезать её из алюминиевого профиля. Пластина должна помещаться в лодку так чтобы она там не болталась. На самой алюминиевой пластине следует высверлить два больших отверстия для валов электродвигателей и четыре маленьких для крепления электродвигателей.Закрепляем электродвигатели на пластине. Крепиться электродвигатели к пластине будут при помощи винтового соединения. После чего на валы электродвигателей устанавливаем переходники.Берём нашу мотораму с электродвигателями и приклеиваем её в заднюю часть лодки так, чтобы расстояние между задней стенкой и переходником составляло 1-2 см. Для следующего шага нам понадобится электрод. Электрод в данной конструкции будет осью привода, для этого нам надо убрать изоляцию с электрода. Убирать изоляцию с электрода очень удобно пассатижами. После того как убрали изоляцию с электрода нужно проверить влезет ли он в заранее заготовленную трубку, если да, то продолжаем.Взяв пассатижи, делим электрод на две одинаковые оси. Длина осей должна быть чуть больше трубок. Затем надеваем лодочные пропеллеры на оси так, чтобы крутились они в разные стороны, и через трубки вставляем их в лодку. Но перед тем как вставить оси в лодку, в задней стенке следует проколоть два отверстия для них.Места, где были проделаны отверстия и просунуты трубки, следует загерметизировать терма клеем, для того чтобы вода не попадала туда.Сняв оси с пропеллерами, следует промазать какой-либо смазкой трубки, где они стоят. Если не смазывать то в трущихся местах будет сильный нагрев, что приведёт, к расширению метала, увеличению сопротивления, что в свою очередь может повлиять на нагрузку электронной системы лодки.Припаиваем провода к электродвигателям. А провода от электродвигателей припаиваем к плате управления вертолета, где были припаяны вертолётные двигатели. Про полярность не сказать не чего, она подбирается методом тыка. Главное чтобы после включения при добавлении газа электродвигатели вращались в противоположные стороны, а лодка двигалась вперёд. А при повороте на право, левый двигатель добавлял обороты, а левый сбавлял. Приклеиваем аккумулятор к корпусу терма клеем. Вырезав квадратик из используемого материала, приклеим и его с помощью терма клея к плате управления и этот бутерброд нужно приклеить также к корпусу. Изготовим крышу для лодки, повторяя действия по пошаговым фото. И украсим лодку тем, что у вас есть.В крыше следует проделать прямоугольное отверстие для зарядки и ремонта. И с внутренней стороны следует приклеить не большие квадратики для того чтобы крышка не проваливалась вовнутрь.Из используемого материала следует вырезать полозья для более стабильного и более управляемого движения. И приклеиваем их при помощи терма клея.Все готово! В итоге у нас получилась очень интересная модель радиоуправляемой лодки. Лодка получилась очень быстрой и на удивление манёвренной. Данная самоделка наверняка понравится многим и многие обязательно захотят сделать себе такую же лодку.Вот подробное видео от автора со сборкой и испытанием данной самоделки:
Ну и всем спасибо за внимание и удачи в будущих проектах самодельщики! Источник
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
10
Идея
8.7
Описание
9.7
Исполнение
Итоговая оценка: 9.44
Источник: https://USamodelkina.ru/11323-kak-sdelat-gonochnuju-lodku-na-radioupravlenii-svoimi-rukami.html
Лодка на радиоуправлении для видеосъемки
Перевел alexlevchenko92 для mozgochiny.ru
Когда я никуда не собираюсь идти и у меня есть немного свободного времени, я люблю придумывать разные интересные поделки. Таким образом хочу представить вам – «Лодку из джунглей».

Это была моя первая попытка постройки лодки на дистанционном управлении своими руками. Я хотел сделать нечто простое, что не будет стоить мне практически ничего и будет устойчивой и безопасной платформой для монтажа камеры. Еще я хотел сделать что-то забавное… В итоге получилась эта лодка.
Я ждал некоторое время, пока мне подвернется возможность сделать лодку. Я рассчитывал, что построю скоростную лодку, но маленькие заросшие ручьи не лучшее место для чрезмерно быстрых лодок. Поэтому, я решил строить маленькую лодку для поездок по ручьям.
Я надеюсь, что эта статья поможет вам при строительстве лодки или же вдохновит на поиск новых необычных самоделок.
Шаг 1: Немного запчастей…
Существует выражение «Мало помалу птицы строят свои гнезда». Это означает, что кусочки и части составляют единое целое.
Вы можете не иметь то, что использовал я, но описание, что приводиться ниже ознакомит вас с тем, чем именно я пользовался.
Я не покупал ничего для этого проекта, но если вы решите, что вам нужно что-то купить, то приблизительная стоимость всех компонентов порядка $60.
Для корпуса лодки, я использовал:
- Кусок пенопласта;
- Картон;
- Моток изоленты.
Что же заставляет пенопласт двигаться вперед?:-)
- Система дистанционного управления 2.4 ГГц ($16);
- Регуляторы хода ($10);
- Аккумулятор напряжением 7,2 В с зарядным устройством($25);
- усилитель ($6);
- электромотор ($5);
- Пропеллер – снятый со старой игрушки.
Дополнительные материалы:
- Металлическая сетка с мелкой клеткой;
- Бамбуковые шпажки;
- Два небольших кусочка дерева;
- Дополнительно, маленький кусочек бамбука;
- Тонкие провода;
- Кусок листового метала;
- Пластиковая тарелка;
- Черная краска.
Инструменты:
- Термоклей – великий материал!
- Дрель;
- Ножницы по металлу;
- И еще разнообразные мелкие вещи, которые найдутся в любом доме.
Шаг 2: Время пенопласта!
У меня не было под рукой идеально ровного куска пенопласта, поэтому корпус лодки я решил сделать из упаковочного пенопласта.

По окончанию работы кусок пенопласта нуждался в серьезной доработке.

Я повырезал все, что не было похоже на части лодки. Приклеил полоску пенопласта к передней части, что бы придать ей уклон вперед.


Фотографии показывают проделанную работу.
Говоря попросту – возьмите кусок пенопласта и превратите его лодку.
Шаг 3: Монтаж двигателя
У нас есть кусок пенопласта, самое время прикрепить к нему мотор.
У меня были проблемы с первоначальным монтажом мотора, поэтому я поменял крепление, сделав их проще.

В основе крепления два куска дерева приблизительно длинной 21 см, что приклеены к лодке под таким углом, чтобы мотор висел на правильной высоте.
Был добавлен поперечный кусок, что служит соединительным элементом все этой конструкции. Были установлены два гвоздя, для фиксации хомута, что позволит легко удалять и устанавливать мотор и пропеллер.

Все было окрашено в черный цвет.
Шаг 4: Добавим картонную перегородку и усилитель руля
Картон не самое лучшее решение в лодках, но он легкий и общедоступный. Его я приклеил термоклеем, но перед этим, я обмотал усилитель руля изолентой.

Это действительно оказалось необходимым, потому что лодка все-таки один раз перевернулась, но ничего не пострадало. Также я прикрепил бамбуковую палочку, что придала картону жёсткости.
Шаг 5: Создание опор в защитном кожухе и монтирование опор
Я хотел построить защитную клетку вокруг пропеллера (как в большинстве лодок с воздушной тягой) для защиты пальцев и защиты самого пропеллера от ударов о деревья и ветки в воде.

Я отрезал кусок металлической сетки, сгибая ее вокруг большой банки из под кофе, (размеры моего пропеллера соответствуют банке, все подбирается в зависимости от величины пропеллера). Я использовал провода, для того что бы держать ее края вместе после сгибания. Защитную клетку необходимо покрасить.
Монтируем в нее мотор и устанавливаем их в корпус лодки.

Что бы смонтировать опоры, я расколол две бамбуковые палочки, затем соединил их вместе с каркасом, соединив разделенные части проволокой.
Шаг 6: Закрылки
Для закрылок необходим материал, который был бы одновременно жестким и легким. Я выбрал пенопласт. Я вырезал одну закрылку и используя ее как шаблон продублировал ее три раза.
- Поместил между двумя кусками пенопласта кусок металла, добавив этим жёсткости, также закрепив небольшие петли, после этого склеил все воедино термоклеем.
Шаг 7: Установка закрылок и их присоединение к усилителю
Поместив закрылки между расколотыми шпажками, закрепил их кусками проволоки. Добавил на места соединений немного термоклея.
Для рулевого механизма, я использовал другую шпажку, связав две закрылки вместе. Я просверлил два небольшие отверстия в палочке и установил туда гвозди, через которые я проклеил нижние части закрылок.
Я использовал небольшой кусок пластиковой трубки, для того что бы соединить закрылки с валом усилителя. Я экспериментировал с разными длинами и позициями, для получения наилучшего рулевого управления.
Шаг 8: Доработка лодки
Я отрезал кусок металла, приклеил его к дну лодки и выгнул его вперед, создав этим угол спереди лодки. Я использовал шпажки и термоклей, соединяя это воедино. Затем я заполнил пространство кусками пенопласта необходимого размера. Использовал силиконовый герметик, смачивая им поверхность для более надежного закрепления пенопластовых кусков.
- В результате проделанных действий нос лодки стал выглядеть гораздо лучше чем в первоначальном исполнении.
Шаг 9: Электроника и проводка
Надеюсь, если вы следовали за мной, у вас уже есть корпус лодки с мотором и усилителем. Теперь приступаем к установке системы радиоуправления, после чего проведем тестирование.
Я использовал радиосистему с частотой 2,4 ГГц, настоятельно рекомендую использовать её (дешёвая). Неплохая цена и радиочастотный диапазон. Я прикрепил провода к агрегатам, проложив их в полиэтиленовый пакет, в качестве защиты от воды. Если этого не сделать, потом будет очень обидно :-(.
- Смонтировал выключатель на борту лодки .
- Установил батарею, проверил работоспособность всех элементов конструкции и наконец-то был готов к спуску лодки на воду.
Шаг 10: Настройка, освещение, монтаж камеры
Я хотел построить катер, который походил бы на настоящий, поэтому я добавил некоторые детали, сделав его уникальным.
Одной из главных идей было использовать лодку как платформу для камеры. Для платформы я использовал дерева, как надежный материал для монтажной рамки. Я установил болт для камеры посредине дощечки, а у основания лодки проклеил все термоклеем.
Также я сделал два сиденья с листа металла, разместив их по бокам от камеры для придания более реалистичного вида. Прикрепил их на гвозди и также добавил немного металлической сетки.
Мне всегда нравились светодиоды, поэтому я решил установить их на лодку. У меня была сборка из светодиодов, и я разместил её сверху над защитной клетке. Также я добавил один сигнальный красный светодиод на клетку. Синие светодиоды я разместил по бокам лодки. Все огни включаются выключателем, имеющим три позиции. Используйте свое воображение, что бы украсить вашу лодку.
Шаг 11: Испытания
Наконец-то я был доволен своей лодкой. Проведя много времени за испытаниями, хочу отметить что лодка полностью справляется с поставленной ей задачей.
Может она и не очень быстрая, но зато ею легко управлять, повороты получаются на славу. Батареи хватает на 30 минут. Я плавал на большие расстояния и даже против быстрого течения.
Она перевернулась всего один раз на затопленном полене, но это не принесло ей никакого ущерба.
Теперь все ???? . Надеюсь вам понравилась эта идея и вы непременно сделаете такую же лодку для себя.
(A-z Source)
Источник: http://mozgochiny.ru/electronics-2/lodka-na-radioupravlenii-dlya-videosemki/
Подводная лодка на радиоуправлении
Цель данной статьи — сделать простую подводную лодку на радиоуправлении. Не требуется изготовление деталей на сложных станках, всё покупается либо в хозяйственном магазине, либо в Китае. В конце статьи приведены ссылки для заказа зарубежом.

Теория
Модель подводной лодки строится по тем же принципам, что и настоящая. В центре находится «прочный» водоНЕпроницаемый корпус, внутри которого скрыты все органы управления и электроника. Снаружу он окружен «легким» проницаемым корпусом, служащим для обтекания и красивого внешнего вида. Наша модель будет состоять только из прочного корпуса.
На скорости подводная лодка может погружаться за счет рулей глубины, а в статическом положении только с помощью балластной цистерны. Как это работает? При плавании на поверхности масса лодки чуть меньше массы объема вытесненной воды (закон Архимеда). Т.е.
если лодка имеет объем 3л, то ее масса должна быть чуть меньше 3кг. Затем лодка начинает набирать воду внутрь прочного корпуса. Объем корпуса остается тот же, а масса увеличивается — и лодка погружается.
В этот момент внутри корпуса немного увеличивается воздушное давление, но не на столько, чтобы нарушить герметичность.
Теоретические расчеты погружения модели подводной лодки.
При строительстве есть 3 основные проблемы. Они вполне независимы и могут решаться отдельно.
- радио-аппаратура (2.4 ГГц не работают под водой)
- герметизация — корпус, вал двигателя и тяги рулей
- балластная цистерна
Начнем по порядку.
Радиоаппаратура
2.4 ГГц не проходят под водой. Самый простой способ найти старую аппаратуру в МГц-евом диапазоне (27МГц, 35МГц, 40МГц, 72МГц или даже 433МГц). Они еще остались у моделистов и можно найти объявления о продаже на форумах.
Моделисты, пожалуйста, не выбрасывайте старые аппаратуры! Подводники купят их у вас ? Это был самый сложный вопрос, дальше все просто.
Герметизация
Нам нужно обеспечить герметичность 3 элементов:
- прочный корпус
- вал двигателя
- тяги управления рулей
Прочный Корпус
часто называется ВПЦ (ВодоНеПроницаемыйЦилиндр) или WTC (WaterTightCilinder), представляет собой пластиковую трубу диаметром 75 мм длиной 600мм.
С обоих торцов в нее вставляются цилиндрические заглушки с канавкой под уплотнительное кольцо.
Труба покупается в сантехническом магазине, заглушки будем делать из нескольких слоев листового ПВХ толщиной 4-5мм, а кольца заказываем в Китае (о том как покупать на Алиэкспрессе написано в конце статьи).






Заглушка будет состоять из 6 слоев. Внутренний диаметр трубы равен 71 мм, толщина уплотнительного кольца 3,5мм. Тогда основные листы имеют диаметр 70мм, маленькие 65мм и внешний большой 75мм.
Очень важно и очень сложно соблюсти соосность листов, чтобы кольца прижимались равномерно к трубе. Для центровки используется болт диаметром 6мм (или строительная шпилька). Сначала сверлим отверстие, затем чертим цилиндр нужного диаметра и вырезаем лобзиком с запасом.
Доводим до нужного диаметра на оси зажатой в дрель. Я обтачивал наждачкой на бруске.
Склеиваем листы тоже на оси, стараясь соблюсти перпендикулярность. Самый лучший клей для ПВХ «Момент-Гель». Титан не берет, обычный «Момент» — тоже. Все, одеваем резиновые кольца и идем тестировать на герметичность.

Позже напечатал заглушку на 3d-принтере — очень понравилась точность. Сейчас планирую все детали напечатать. Об этом в отдельной статье.
Дейдвуд
Так называется узел, обеспечивающий герметичность вала двигателя. В торцы внешней трубы впаиваются подшипники. Вставляется вал и внутрь трубы забивается густая смазка (например литол). Ее надо иногда добавлять, т.к. вода постепенно вымывает.
Валы и подшипники купил на Али, медные трубки и смазку на строительном рынке. Я нашел подшипники 3мм внутренний и 6мм внешний диаметр.
Соответственно покупаем валы из нержавейки на 3 мм, и медную трубку с внутренним на 6 мм (внешний получился 8мм). Валы обязательно покупать специальные, обычная проволока несиметрична, будут биения.
Сначала припаиваем патрубок, затем просверливаем в нем отверстие. Для пайки понадобится кислота и 3-ья рука ?


Тяги рулей
Тяги выводим через резиновые манжеты закрепленные на медных трубках диаметром 6мм. Диаметр самих тяг 1.5мм. Я использовал жесткий провод со снятой изоляцией.
Балластная цистерна
Обычно это самая сложная часть подводной лодки. Но мы сделаем ее просто — воспользуемся микронасосом. Точнее перистальтическим микронасосом — он сам держит давление и не требует дополнительных клапанов.
Сам насос способен развивать давление в 1 атмосферу, это значит он сможет прокачать цистерну на глубине до 10 метров.
Управляется насос так же как обычным электромотором — регулятор хода или серва с микро-переключателями.
Есть вариант наполнять резиновый шарик, но он может лопнуть. Воспользуемся шприцом на 150 мл, называется шприц-Жане. Насос сам двигает поршень. Позже можно повесить датчики и контролировать объем поступившей воды.
Оригинальная силиконовая трубка в насосе 2.54мм, поменял на 46мм. В итоге пропускная способность увеличилась в 1.5 раза. Мотор расчитан на 6 вольт, подаю 12. Мотор немного нагревается, но не критично. Итоговая скорость 100мл за 20 сек.
Компоновка
Лодка имеет размеры 60см длина и 7,5см диаметр. Внутренний диаметр 71мм. Заглушки заходят на 2.5см каждая.
Внутри корпус поделен на «отсеки».
- 1 — аккумулятор и приемник
- 2 — цистерна
- 3 — насос
- 4 — сервы и регуляторы хода
- 5 — главный мотор
Цистерна должна находиться по середине, чтобы лодка погружалась горизонтально (не было дифферента).
Элеметны крепления изготовлены из листового пористого ПВХ толщиной 5мм. Затем они стягиваются на железных шпильках, расположенных вдоль корпуса. Заднюю заглушку тоже следует закрепить на шпильках, чтобы обеспечить жесткоть узла с мотором и тягами рулей.
Изначально для управления мотором и насосом использовались регуляторы хода. Но реверс у них на много медленнее прямого вращения, что не удобно для насоса. Во время испытания я не ставил отдельную схему питания UBEC и использовал встроенный BEC на 1 ампер. Т.к.
мне пришла бракованная серва, которая заклинивала, в этот момент ток подскакивал и палил весь регулятор. Может и не весь, но он больше не работал как положено. Так я спалил 3 регулятора и решил сделать схему с микро-переключателями. Она очень простая и обеспечивает симметричное вращение вперед/назад.
Но стабилизатор питания на 3 ампера все таки лучше поставить.
Мотор 550-ой серии избыточен для модели такого размера, можно поставить меньше. Крепится он шурупами на специальный кронштеин к задней заглушке. Соединение с валом через латунную муфту.
Так же стоит поставить модули Fail-safe на каналы насоса и двигателя. Двигатель настраивается на выключение, а насос на продувку цистерны.
Все чертежи на отдельной странице.
Балансировка
Объем корпуса приблизительно равен 2,8 литра. Масса всех деталей около 1кг, пришлось добавить еще 1,8 кг груза. Главный принцип прост:
Объем надводной части должен быть меньше объема цистерны
Он может быть любой массы, лишь бы общая оставалась 2.8 кг. Поэтому надводные элементы делают из меди или тонких пластиков.
Балансировка осуществлуяется в 2 положениях:
- Надводное — Двигая/добавляя грузы и приклеивая пенопласт в подводную часть, добиваемся нулевого дифферента. Важно на этом этапе крепить пенопласт только ниже ватерлинии.
- Погруженное — добавляем пенопласт выше ватерлинии и добиваемся горизонта.
Купить на Алиэкспресе
Ссылки — ключевые слова для поиска. Так же выбирайте галочку «бесплатная доставка» и «сортировать по цене».
В хозяйственном магазине или на строительном рынке:
- медная трубка 8мм
- медный провод жесткий 1.5мм
- паяльная кислота + припой
- труба канализационная ПВХ 75мм — 250руб
- листовой пористый ПВХ — 500руб/м²
- шприц Жане — 150руб
- контакты для мягких проводов
- шпильки 6мм
Что развивать дальше
- телеметрия: напряжение, токи, глубина, ориентация
- спасение: буй, детектор воды
- торпеды, ракеты
- 3d-печать деталей
Источник: https://imelnikov.ru/model/submarine/
Делаем радиоуправляемую модель лодки на Ардуино Нано
Делаем на основе Arduino Nano модель катера или лодки из пенополистирола на радиоуправлении через Bluetooth.

Шаг 1. Комплектующие
Для этого проекта нам понадобится не так уж много деталей.
Также нам понадобятся следующие приложения:
- Arduino IDE
- Приложение Android Arduino Bluetooth RC Car
Шаг 2. Создаем корпус катера или лодки
Обычно всё начинается тогда, когда хочется попробовать управлять моделью катера на радиоуправлении, но покупать подобную модель дорого или нет желания. Поэтому мы переходим к созданию корпуса. Мы нашли рисунки лодки в Интернете и решили сделать его из пены.
Думаем, что проблем с этим не возникнет, да и все любят разные внешние виды катеров и лодок — кто-то любит парусно-моторные, кто-то просто моторные.



Шаг 3. Двигатель, штурвал, пропеллер
Следующим шагом мы сделали крепление для двигателя. Также мы сделали рулевое колесо и пропеллер. В конечном итоге их заменили купленные.



Как и написали выше — пропеллер и штурвал заменили купленные элементы.

В итоге мы получили такой результат:

Вал гребного винта с валом двигателя соединен с помощью муфты.

Шаг 4. Принципиальная схема
Так как на следующем шаге мы будем размещать электронику на корпусе нам нужно собрать все электронные детали вместе.
Шаг 5. Закрепляем электронику
После создания корпуса и крепления — переходим к закреплению всей электроники на корпусе внутри лодки.
Шаг 6. Скетч для проекта
Вы можете скачать или скопировать код для проекта Ардуино катера ниже.
Скачать arduino-kater-bluetooth.ino
#include
Servo myservo;
int val;
int LED = 13;
int IN4 = 4; // Input3 5
int IN3 = 5;
int IN2 = 7;
int IN1 = 6;
int k = 0;
void setup()
{
Serial.begin(9600);
pinMode(LED, OUTPUT);
pinMode (IN4, OUTPUT);
pinMode (IN3, OUTPUT);
pinMode (IN2, OUTPUT);
pinMode (IN1, OUTPUT);
myservo.attach(10);
}
void loop()
{
if (Serial.available())
{
val = Serial.read();
if (k == 0)
{
myservo.write(90); // (1 )
k++;
}
// «F» ( w)
if (val == ‘X’)
{
myservo.write(90);
}
if (val == ‘x’)
{
myservo.write(90);
}
if (val == ‘F’)
{
digitalWrite (IN4, HIGH);
digitalWrite (IN3, LOW);
digitalWrite (IN2, HIGH);
digitalWrite (IN1, LOW);
}
// «S»
if ( val == ‘S’)
{
digitalWrite (IN3, LOW);
digitalWrite (IN4, LOW);
digitalWrite (IN2, LOW);
digitalWrite (IN1, LOW);
}
// «B»
if ( val == ‘B’)
{
digitalWrite (IN4, LOW);
digitalWrite (IN3, HIGH);
digitalWrite (IN2, LOW);
digitalWrite (IN1, HIGH);
}
//
if ( val == ‘L’)
{
myservo.write(50);
// myservo.write(90);
}
//
if ( val == ‘R’)
{
myservo.write(130);
// myservo.write(90);
}
// 45 +
// «G»
if (val == ‘G’)
{
digitalWrite (IN4, HIGH);
digitalWrite (IN3, LOW);
digitalWrite (IN2, HIGH);
digitalWrite (IN1, LOW);
myservo.write(50);
delay(1000);
myservo.write(90);
}
// «I»
if ( val == ‘I’)
{
digitalWrite (IN4, HIGH);
digitalWrite (IN3,LOW);
digitalWrite (IN2, HIGH);
digitalWrite (IN1, LOW);
myservo.write(130);
delay(1000);
myservo.write(90);
}
// «»
if ( val == ‘H’)
{
digitalWrite (IN4, LOW);
digitalWrite (IN3, HIGH);
digitalWrite (IN1, HIGH);
digitalWrite (IN2, LOW);
myservo.write(130);
delay(1000);
myservo.write(90);
}
// «J»
if ( val == ‘J’)
{
digitalWrite (IN4, LOW);
digitalWrite (IN3, HIGH);
digitalWrite (IN1, HIGH);
digitalWrite (IN2, LOW);
myservo.write(50);
delay(1000);
myservo.write(90);
}
}
}
Итоговый результат вы можете увидеть на первой фотографии к данному уроку.
Надеемся, что у вас не возникло проблем при реализации проекта.
Источник: https://ArduinoPlus.ru/arduino-model-lodki-radioupravlenie/
Приветствую, мозгочины! Сегодня расскажу вам, как я своими руками
создал Arduino-поделку
— радиоуправляемый катер с опцией автопилота.



По сути, это мозгоруководство
о создании автопилота на микроконтроллере Arduino, который можно установить в любую модель, тем самым превратив ее в радиоуправляемую поделку
, даже не просто поделку, а автономного дрона. На сборку данной мозгоподелки
меня вдохновили такие робо-катера как UBC Sailbot и Scout, который кстати, совершил успешный трансатлантический рейс.
Весь процесс создания катера с автопилотом занял у меня более года, и за это время я приобрел много знаний по теории автопилотирования и схемотехники, и думаю, что в один прекрасный день я применю их на настоящем катере моего отца.
Окончательная, завершенная версия катера с автопилотом основывается на решениях трех прототипов, первый из которых самый простой по схеме и коду, остальные более доработанные. Финальный катер представляет собой полнофункциональную радиоуправляемую модель, которая успешно плавает по глади пруда, что я постарался отобразить на фото. Эта версия хотя и окончательная, но может быть доработана и усовершенствована, как с точки зрения кода, лодку нужно научить следовать маршруту, а не просто от точки к точке, так и с точки зрения электроники, можно поставить акселерометр, чтобы он компенсировал наклон от компаса.
Шаг 1: Видеопрезентация
Небольшое видео обозначит направление этого мозгопроекта
:
Шаг 2: Прототип 1









Первый катер, то есть прототип 1, был самый простой по исполнению и должен был уметь:
- считывать GPS-координаты своего положения
- считывать азимут с компаса
- управлять сервоприводом руля
- использовать руль для следования курсу
А так же на нем я тестировал формулы маневрирования для создания действующего автопилота. Основой прототипа 1 был микроконтроллер Arduino Uno, в финальной версии я использовал ATmega328.
Считывание GPS-координат
На первом прототипе я установил самый дешевый GPS-модуль который смог достать, это UBlox PCI-5. Для его монтажа нужно было лишь припаять четыре провода к задней стороне платы, подсоединить их к Arduino и прикрепить антенну. Для обработки поступающих данных я использовал библиотеку TinyGPS ++ , которая позволила мне получить координаты текущего положения, скорость, направление и много другого! Подробнее о установке этого модуля, который кстати я использовал и в прототипе 2, вот в этом моем мозгоруководстве .
Считывание азимута
Чтобы получать данные с компаса я использовал HMC5883L , который легко подключается к микроконтроллеру через I2C. Как именно он устанавливается и как с ним работать хорошо описано и
Управление сервоприводом руля
Контролировать сервопривод руля с помощью Arduino очень легко , но если только вы не используете библиотеку SoftwareSerial, которая нужна для TinyGPS ++, и которая конфликтует с одним таймеров Arduino! Запущенная SoftwareSerial мешает работе любого сервопривода использующего стандартную библиотеку, и решением данного мозгоконфликта
является использование библиотеки PWM Servo library.
Формулы алгоритма автопилотирования
В прототипе 1 я применил несколько функций, которые позднее станут критичными. Эти функции используют формулу Хаверсина для расчета таких параметров как расстояние между двумя точками, направления от одной точки к следующей и реальный азимут по данным компаса. Более подробно об этих формулах в этой статье .
Сборка компонентов
Компоненты первого прототипа я разместил на деревянном каркасе (см. фото), и теперь, зная положение этого каркаса-автопилота и сравнивая с заданным, можно поворачивать руль и сохранять заданный маршрут. Это будет полезно в дальнейшем для навигации по GPS-координатам.
Шаг 3: Прототип 2












Довольный результатами первой поделки
я решил создать прототип 2 с программными доработками автопилота. Целями для второй самоделки
были:
- плавание по заданным GPS-кооддинатам
- работа автопилота от аккумулятора
- тестирование и запись данных автопилота
Конструкция автопилота также претерпела некоторые изменения — была добавлена макетная плата ProtoSheild, на которую я установил сам Arduino и компас. Все компоненты смонтировал на фанерное основание и “упаковал” в пластиковый контейнер.
В этот же контейнер я попытался добавить приемник дистанционного управления, но безуспешно из-за нехватки свободного места.
Плавание по заданным GPS-кооддинатам
Код для Arduino я написал таким образом, чтобы он поворачивал руль по направлению к следующей точке заданного маршрута: используя GPS-координаты для вычисления соотношений последующих точек и сравнивая их с компасом, вычисляется поворот руля. Если вычисленное значение правее, на 90 градусов, то руль повернется на 60 градусов. Если вычисленное значение левее, на 270 градусов, то руль повернется на 120 градусов. Если же значение находится между 330 и 30 градусами, то руль будет поворачиваться экспоненциально сохраняя положение прямо.
Все это будет происходить в цикле, примерно так (этот код обобщенный):
While(distanceInMeters(gpslat, gpslong, waypointlat, waypointlong)
Пояснение кода таково: если расстояние между катером и следующей точкой более 5 метров, то складывая азимут катера и азимут следующей точки, получается действительный азимут, оба азимута посылаются функции the RudderTurn function, которая вычисляет нужный угол поворота и соответственно поворачивает мозгоруль
.
Установка аккумулятора
Запитать Arduino от аккумулятора довольно просто. Для этого на микроконтроллере есть контакт Vin, и на него можно подать до 20В постоянного тока. У меня была литиевая батарея на 12.6В, к которой я припаял разъем и подключил ее к контакту Vin на Arduino.
Шаг 4: Тестирование прототипа 2




Для того чтобы проверить прототип в действии я установил два светодиода, первый из которых будет светиться когда зафиксируется GPS-координата, а второй, когда будет достигнута эта точка.
Испытание прототипа
Пробы своего автопилота я проводил на местном поле. К своему ноутбуку я подключил автопилот и запустил последовательный монитор (часть программного обеспечения Arduino), который записывал GPS-координаты все время следования по заданным точкам. Я пользовался рулем который направлял меня к следующей точке, и я поворачивал, словно это был мозгокатер.
На представленных фото обозначен маршрут тестов. Если я оказывался ближе чем 5 метров к нужной точке, то автопилот переключался и начинал навигацию к следующей точке. В процессе этих тестов код поделки
претерпел довольно много незначительных изменений.
Для конвертации последовательного текста в путь Google Earth, я импортировал текст в Excel, сохранив файл и далее следуя указаниям Earthpoint , преобразовывал файл в формат KML.
Шаг 5: Первое судно






Судно, которое я сделал первым для этого проекта, было больше экспериментом, чем действующим прототипом. Просто я хотел посмотреть, смогу ли я создать функционирующий аэроглиссер самостоятельно или придется покупать.
Почти все детали судна, включая палубу, вырезаны из пеноматериала. Для тяги мотор сначала я взял щеточный, но потом заменил его двигателем без щеток с пропеллером 5х3. Этот 9-ти граммовый сервомотор я смонтировал на задней панели, а для проводов идущих к нему в контейнере высверлил отверстие. Но в конце концов, эта самоделка
не отправилась в плавание… Дело в том, что система ESC, которую я планировал использовать сгорела во время инцидента другого мозгопроекта , да еще GPS модуль наотрез отказался работать на поверхности пруда.
Шаг 6: Модифицированный катер




А теперь снова вернемся к чертежам катера! На известном онлайн-ресурсе я купил новый катер. В комплект к нему входили никель-металл-гидридный (Ni-MH) аккумулятор на 7.4В, зарядное устройство, передатчик и плата приемника. С передатчиком возникли небольшие проблемы — нужно было найти 12 батареек АА, и я остался разочарованным не работающим катером. Но, для проекта это не критично и я продолжил.
Я выпаял два Н-канальных MOSFET-транзистора из цепи приемника, они пригодятся позднее. После этого обрезал все провода и загерметизировал горячим клеем все щели и трещинки, которые нашел в корпусе катера.
Два двигателя катера имели сложную систему охлаждения — очень шумный пропеллер, который нагнетал воздух на двигатели, еще на моторах стояли шунтирующие конденсаторы, и оба этих момента работали в мою пользу. А вот для маленького переключателя на верхней стороне мозгокатера
я не нашел более достойного применения.
Далее встал вопрос безопасного размещения прототипа и для его решения я использовал небольшую досочку к низу которой, в районе двигателей, приклеил деревянную палочку, а еще к доске и к корпусу катера приклеил застежку-липучку, удерживающей силы которой хватит для “спасения” автопилота при переворачивании катера.
Шаг 7: Прототип 3










Одним из недостатков двух предыдущих прототипов была медленная скорость обновления, то есть скорости реакции. Руль недостаточно быстро реагировал на изменение маршрута и этот момент был включен в список целей и задач нового прототипа:
- увеличение скорости реакции автопилота
- добавление контроллеров моторов
- программирование совместной работы двигателей
- установка приемника
Увеличение скорости реакции
Единственный минус библиотеки TinyGPS ++ это медленность. Проблема в том, что Arduino Uno не может выполнять две вещи одновременно (в принципе может, на деле — нет). Простым решением может стать еще один микроконтроллер Arduino, который с помощью библиотеки TinyGPS ++ будет обрабатывать данные GPS, а затем отправлять параметры на первый микроконтроллер автопилота. Но у меня не было еще одного Arduino.
Arduino Uno это, по существу, чип ATmega328 и еще несколько дополнительных компонентов. Зная это можно создать свой собственный Arduino на макетной плате. И для этого есть хорошее мозгоруководство .
К собранному самостоятельно Arduino, так же как и “старый” модуль, я подключил новый GPS-модуль Ublox NEO-6M. Для программинга самодельного Arduino использовал библиотеку Bill Porter’s Easy Transfer library , а “связал” оба микроконтроллера одиночным проводом, то есть односторонним последовательным соединением. Этот самодельный Arduino повысил скорость реакции автопилота с 4 Гц до 50 Гц!
Добавление контроллеров двигателей
Мне очень понравилась плата ProtoSheild для Arduino Uno, которую я использовал, но оказалось, что она не имеет достаточного пространства для крепления двух контроллеров двигателей. Поэтому я убрал эту мини-плату, и поставил другую, больших размеров.
Электроцепь контроллеров двигателей проста: МОП-транзистор (MOSFET), с помощью ШИМ, контролирует среднее напряжение, идущее к двигателю. Резистор 1кОм ограничивает силу тока чтобы не перегорел Arduino, а резистор 10кОм удерживает MOSFET закрытым, когда отсутствует входящий сигнал.
Программирование взаимодействия моторов
У данного катера отсутствует штурвал, то есть руль, и вместо него для управления используется два мотора. Их то я и решил задействовать, а не устанавливать сервомотор для управления. Контроллеры моторов я уже собрал, осталось только запрограммировать Arduino для управления этими контроллерами.
Программирование я начал с написания макета программы в начал с Visual Studio. По мере написания я отладил код, и в конце концов добился взаимодействия двигателей. Оставалось только переделать код с VS на Arduino, но это не трудно, так как языки C # и C ++ очень близки.
Установка приемника радиоуправления
На прототип я смонтировал приемник ДУ для ручного управления самоделкой
. Это тоже довольно просто сделать, нужно лишь считывать входящие значения функцией pulseIn и “научить” реагировать автопилот на эти значения.
Испытание прототипа
Прототип автопилота я установил внутри катера, подключил двигатели к контроллерам и запрограммировал маршрут плавания по местном пруду. После прохождения трех точек, поделка
перестала работать и “сгасла”. Оказалось, что высокое напряжение от аккумулятора (12 В) “спалило” регуляторы напряжения 5 В.
Мое увлечение радиоуправляемыми моделями началось с постройки катера на радиоуправлении. Многим моделистам известен такой журнал как «Моделист конструктор». В одном из номеров за 198Х какой-то год я прочитал статью про спортивный катер и тоже захотел построить такой же. На страницах были приведены в масштабе необходимые чертежи. Вот что из этого получилось.
В связи с тем, что те годы прошлого столетия были достаточно тяжелые и для модели трудно было найти нужные детали, то все строилось из подручных материалов. Регуляторов и моторов вообще не было. Но буду последовательно вести рассказ.
В кружки и дом пионеров я не ходил, мастерил потихоньку дома. Про стеклоткань конечно слышал, но родители сказали это вредно и больше не обсуждается. Поэтому перевел все чертежи на толстый картон, нарезал на пенорезке кубиками пенопласт. Собрал шпангоуты вместе с пенопластом и прошелся пенорезкой.
Пенорезка была самодельная, между двух опор натянул нихромовую тоненькую проволоку, через которую пропускал ток от мощного 12 вольтового блока питания.
Далее все оклеил плотным картоном. Пропитал все лаком, предварительно открытые участки пенопласта покрыл ПВА, чтобы пенопласт не растворился. Шпангоут, где предполагался двигатель, сделал из стеклотекстолита. Корпус получился очень легким и достаточно прочным. Длина модели 800 мм, ширина 240 мм.
В качестве дейдвуда использовал алюминиевую трубку диаметром 10 мм, в которую после некоторых доработок напильником встали подшипники. В верхней части сделал масленку с пробкой под винт. В качестве вала использовал металлический пруток, на который нанес резьбу М4. В дейдвуд шприцем залил густое масло, от отцовской машины.
Киль сделал сам, к стержню припаял кусочек фольгированного стеклотекстолита. Также установил два подшипника для легкости хода.
На день рождения родители подарили первую серьезную двухканальную аппаратуру пистолетного типа Acoms на 27MHz с встроенным BEC-ом и двумя стандартными сервоприводами.
Мотор был первоначально установлен низкооборотистый на 12v, его характеристики мне были не известны, но крутящий момент был не маленький.
Лючки сделал быстросъемными, с одной стороны задвигаются, а с другой — на винтовых соединениях.

Регулятор с реверсом сделал сам примитивно просто. Взял тумблер от старого прибора на три положения. Разобрал, ослабил пружину, просверлил в ручке отверстие и присоединил тягу от сервопривода. Настроил в аппаратуре расходы. Работает как часы, чистая механика. Конечно, можно поспорить относительно данного решения, но напомню, что это делалось много лет назад.
В качестве винта использовал самодельный из гнутого металла, но спустя некоторое время мне удалось купить винт из латуни, результат ошеломил. Диаметр винта 40 мм.
Переделок много не последовало, нужно было только состыковать валы. С этой задачей позволил справиться гибкий соединитель, до этого были и шестеренки, чтобы повысить обороты, и карданная передача.
Аккумулятор использовал от машинки NiMh 7,2 3000mAh.
Но радость от скоростных заплывов была недолгой. Вдалеке от берега из катера пошел дым.
Уже на берегу осмотр показал, что горят провода и сильно греется мотор. Такого я еще не видел ни разу.
Взамен поставил толстенные провода в силиконе, плюс ко всему решил сделать систему водяного охлаждения. Купил медную трубку в автомагазине от тормозной магистрали. Плотно накрутил на двигатель. В транце сделал ввод и вывод. На киль припаял кусочек трубки. Соединил все резиновой трубкой из того же автомагазина. Тесты в ванной показали работоспособность системы, вода нагнетается в систему охлаждения от гребного винта.
На высокой скорости стало заплескивать воду в катер, пришлось все лючки перед заплывами заклеивать липкой лентой. При смене аккумуляторов ленту приходится переклеивать на борт для повторного использования, поэтому появляются пятна от частичек клея липкой ленты. Периодически приходится чистить корпус лодки.
Каждым летом рассекаю по водным просторам.


С момента постройки и по сей день катер существует, изменений в конструкцию не вносил. Одним словом, радует глаз и навевает приятные воспоминания о проведенном времени.
Современные производители рыболовных приспособлений делают постоянные шаги вперед и предлагают любителям порыбачить все новые, более уникальные снасти. Главным преимуществом рыболовных корабликов является то, что они значительно ускоряют и совершенствуют процесс ловли рыбы. Вы тоже хотели бы опробовать это приспособление в деле? У вас есть два варианта: купить прикормочный кораблик в магазине или попробовать сделать радиоуправляемый катер своими руками.
Самодельный радиоуправляемый катер можно эксплуатировать на протяжении всего рыболовного сезона, с лета и до начала холодов. Особенно прочные и мощные модели подойдут также для раскладывания приманки в зимний период на сложных водоемах с сильным течением.
Радиоуправляемый кораблик для рыбалки своими руками поможет вам приманивать и вылавливать такую рыбу, как щуку, голавля, жереха, густера, окуня, карпа и многих других. За счет небольшого веса и мощного двигателя такие кораблики быстро доставляют прикормку в нужное место. Благодаря же возможности полностью контролировать местонахождение корабля на воде расстановка прикорма максимально точна.
Большой плюс, который получает рыбак, решивший изготовить радиоуправляемый катер для рыбалки своими руками, — возможность рыбачить в любых обстоятельствах. Известно, что на доставку прикормки с помощью рогатки или ракеты уходит большое количество времени и сил, к тому же при плохих погодных условиях эти методы не всегда работают слаженно. Радиоуправляемый катер своими руками способен преодолевать трудности в виде течения или растительность, развивать высокую скорость и маневрировать, транспортировать прикормку для рыбы на большие дистанции.
Вместе с тем современный катер на радиоуправлении для рыбалки своими руками применяется не только для доставки прикорма, но и для транспортировки снастей и расставления мушек. Труднодоступные места и непроходимые заросли, которые раньше мешали рыбаку добраться до рыбы и поймать ее в сети, сегодня уже не преграда. Радиоуправляемый кораблик своими руками способен быстро и качественно моделировать свой маршрут, огибать препятствия на пути, сканировать водоем на предмет наличия рыбы и даже расставлять маркеры, которые позволят легко ориентироваться и оформлять зону поклева в дальнейшем.
Как устроен радиоуправляемый катер своими руками
Независимо от сложности модели и мощности агрегата радиоуправляемый катер для рыбалки своими руками работает по похожему принципу, отличаясь лишь некоторыми дополнительными деталями и характеристиками.
Форма кораблика , независимо от его мощности, имеет правильную геометрическую форму, что позволяет конструкции прочно удерживаться на воде и балансировать даже при сильном течении и порывах ветра.
Изучая чертежи радиоуправляемого катера своими руками, вы убедитесь, что нижняя часть кораблика утяжеляется специальной пластиной, которая не дает ему затонуть в процессе транспортировки прикормки.
С задней стороны радиоуправляемый катер своими руками оборудован специальной емкостью для прикорма. Размеры бункера для корма могут отличаться, в зависимости от модели и предназначения кораблика. Некоторые бункеры для прикормки оборудованы клапанами, которые открываются по команде рыбака в наиболее выгодное время и в пригодном для приманки рыбы месте.
Главным движущим элементом кораблика является двигатель. Он отвечает за развитие скорости, маневренность и количество возможных транспортировок прикормки к месту поклева. Важно помнить о том, что радиоуправляемые модели катеров своими руками оснащаются подходящими двигателями, который влияет не только на работу гаджета, но и на его грузоподъемность и способность балансировать на воде. Не стоит приобретать небольшие модели корабликов и большие моторы, поскольку таким образом вы усложните работу своему агрегату.
Аккумуляторы предназначены для передачи электрической энергии двигателю и приведения снасти в движение. От размера батареи зависит продолжительность и эффективность работы кораблика.
Некоторые модели корабликов оборудованы специальным устройством под названием эхолот. Функция эхолокации позволяет с легкостью сканировать дно в процессе транспортировки прикорма и подавать на экран пульта управления информацию о количестве рыб под водой, наличии неровностей дна, месте прикорма и особенностях рельефа.
Кораблик для прикорма своими руками
Как сделать радиоуправляемый катер для рыбалки своими руками? Несмотря на большое количество современных моделей водяных змеев от производителей кораблик можно сконструировать своими руками. Самостоятельное изготовление подходит для случаев, если вы не планируете частые вылазки на рыбалку и не являетесь большим поклонником новомодных приспособлений для вылова рыбы. К радости тех, кто интересуется тем, как сделать радиоуправляемый катер, конструкция самодельных корабликов достаточно примитивна и собрать ее не составит много труда.

Из материалов для изготовления водяного змея вам понадобятся:
- Доски из легкого дерева (яблоня, груша). Такой материал является достаточно прочным и в то же время хорошо держится на воде. Эти качества очень важны, так как позволят сделать кораблик маневренным.
- Алюминиевые пластины. Обязательный участник любой инструкции, как сделать радиоуправляемый катер своими руками, которые помогут собрать корпус в единое целое и достаточным образом его утяжелить. Благодаря алюминиевым пластинам прикормочная лодка для рыбалки приобретает способность справляться с течением на водоеме.
- Рыболовная леска и катушка. Поскольку самодельные кораблики не оснащены мощным двигателем и балансирующими деталями, руководить ими на воде придется с помощью лесок и катушек. Без них радиоуправляемый катер своими руками не сможет качественно функционировать.
- Элементы крепления. Помогут вам прочно закрепить детали и быть уверенными в том, что ваш агрегат справится с доставкой прикорма и снастей на выбранном вами водоеме.
- Поводки. Элементы крепления, которые способны фиксировать леску натяжения в нужном положении и помогать в процессе растягивания приманок и мушек.
- Спиннинг. Помогает руководить корабликом и следить за его движением на воде, особенно если рыбалка производится на водоеме с сильным течением.

Что использовать в процессе приманки и вылова рыбы?
- Прикорм с феромонами. Часто используется в процессе вылова крупной рыбы на трофейной или спортивной рыбалке. Корм содержит определенные микроэлементы, которые провоцируют выработку у рыбы гормонов и привлекают ее внимание. Биологически активные вещества качественно увеличивают количество улова и уменьшают время на затравку и привлечение рыбы к месту поклева.
- Мушки. Наиболее распространенные детали для привлечения рыбы, которые воздействуют на потенциальную добычу внешним видом, имитируя движение живых насекомых. Существует большое количество разновидностей мушек, которые выбираются в зависимости от особенностей водоема и типы рыбы, которую вы планируете поймать. В магазинах можно найти мушки в форме стрекоз, бабочек, тараканов, мух и пауков. Выбирая мушки, вы должны помнить о том, что в коллекции рыболова должен быть запас различных видов мушек, которые стоит чередовать в процессе раскладывания приманки. Мелкие мушки привлекают мелкую рыбешку, которая в свою очередь может стать живой приманкой для более крупной добычи.
- Живая приманка. Используется для привлечения крупной рыбы на больших водоемах. В зависимости от типа рыбы, которая вас интересует, можно приобрести различную живую приманку или заготовить ее самостоятельно. При самостоятельной заготовке живой приманке необходимо обязательно учитывать сезон рыбалки и гастрономические предпочтения рыбы. Так же, как и с мушками, важно предусмотреть наличие различного типа прикормки, чтобы иметь возможность моделировать способы вылова и оптимизировать весь процесс.
Особенности рыбалки корабликом ручного производства
Кораблики, которые изготавливаются своими руками, имеют некоторые особенности. Их важно учитывать, планируя расположение прикорма и заготавливая принадлежности для рыбной охоты.
Помните, что для кораблика ручной работы подходят открытые водоемы с относительно спокойной водой. Стремительное течение или чрезмерная растительность могут помешать процессу растяжки лески и расположению приманки.
Обращайте внимание на берег, с которого запускаете кораблики. Помните о том, что большая растительность на берегу может также помешать движению агрегата по воде. Просчитывайте маршрут радиоуправляемого катера для прикормки так, чтобы исключить любую вероятность зацепления лески.
Скорость проводки и расположения приманок с корабликов ручной работы должна быть средней, чтобы не вспугнуть косяк рыбы и не испортить назначенное место для поклева.
Двигаться в процессе проводки кораблика нужно от истока водоема, чтобы не отбрасывать тень на воду и не пугать рыбу. Одновременно это необходимо для того, чтобы всегда иметь возможность видеть кораблик и вовремя корректировать его движения при течении или начале поклева.


Всем доброго времени суток дорогие друзья! В сегодняшней статье я бы вам хотел вам показать, как сделать лодку на радиоуправлении. Эта самоделка отлично подойдет для тех, кто хочет заняться лодочным моделизмом, но модели лодок стоят довольно дорого. Собрать свою модель будет не намного дешевле, но куда интереснее, чем просто купить готовую лодку в магазине. Ну да ладно, хватит длинных предисловий, погнали!
И так, для данной самоделки нам понадобится:
— лист ABS пластика.
— электродвигатели 180 класса 2шт.
— лодочные пропеллеры.
— переходник для вала электродвигателя.
— электроды подходящего диаметра.
— алюминиевые трубки, внутренний диаметр которых равен внешнему диаметру электродов.
— 2s 7.4v Lipo аккумулятор.
— немного провода.
— электроника от старого радиоуправляемого вертолёта.
— алюминиевая пластина.
— винты.
Из инструментов нам также понадобится:
— Линейка.
— маркер.
— канцелярский нож.
— терма клей.
— дрель.
— отвёртка.
— плоскогубцы.
— смазка.
— паяльник.
Для начала нам потребуется сделать корпус самой лодки. В качестве материала для корпуса лучше всего взять толстые листы ABS пластика. На листе пластика при помощи линейки и маркера следует отметить прямоугольник длиной 25см и шириной 11.5см.
После того как прикинули размеры на листе пластика, следует поделить верхнюю часть на прямоугольники, так как это показано на фото ниже. Это нужно для того чтобы более симметрично начертить нос нашей лодки. И пытаемся как можно точнее сделать нос лодки, но если у вас не получится, то можно скачать и распечатать фотошаблонов в интернете.


С помощью канцелярского ножа отрезаем прямоугольник и отрезаем от прямоугольника лишнее. Так чтобы у нас получилось, что то похожее на лодку. Затем тем же канцелярским ножом делим нашу заготовку пополам.

Канцелярским ножом срезаем угол на заготовках, которые только что получили. Это нужно для того, чтобы их можно было максимально плотно склеить под углом.

Затем срезаем две заготовки так, чтобы у вас получилось, так как на фото ниже.

Наносим терма клей на заготовки и склеиваем их между собой. Из того же пластика следует вырезать две заготовки похожие на трёх угольники. И приклеиваем их к лодке для того чтобы усилить корпус. На протяжение всей сборки корпуса старайтесь не жалеть терма клей и проклеивать все очень хорошо, это нужно для герметичности всей конструкции.
Наносим терма клей на указанное место и сгибая пластик склеиваем два конца между собой.

Из используемого пластика следует вырезать две полоски такой шириной, чтобы они были не выше задней стенки. И приклеиваем на те места, что указаны на фото.
Для следующего шага нам нужно изготовить некую «мотораму» на которой будут крепиться электродвигатели. Для моторамы нам понадобится какая-нибудь металлическая пластина, автор самоделки решил вырезать её из алюминиевого профиля. Пластина должна помещаться в лодку так чтобы она там не болталась. На самой алюминиевой пластине следует высверлить два больших отверстия для валов электродвигателей и четыре маленьких для крепления электродвигателей.


Закрепляем электродвигатели на пластине. Крепиться электродвигатели к пластине будут при помощи винтового соединения. После чего на валы электродвигателей устанавливаем переходники.
Берём нашу мотораму с электродвигателями и приклеиваем её в заднюю часть лодки так, чтобы расстояние между задней стенкой и переходником составляло 1-2 см.


Для следующего шага нам понадобится электрод. Электрод в данной конструкции будет осью привода, для этого нам надо убрать изоляцию с электрода. Убирать изоляцию с электрода очень удобно пассатижами. После того как убрали изоляцию с электрода нужно проверить влезет ли он в заранее заготовленную трубку, если да, то продолжаем.
Взяв пассатижи, делим электрод на две одинаковые оси. Длина осей должна быть чуть больше трубок. Затем надеваем лодочные пропеллеры на оси так, чтобы крутились они в разные стороны, и через трубки вставляем их в лодку. Но перед тем как вставить оси в лодку, в задней стенке следует проколоть два отверстия для них.
Места, где были проделаны отверстия и просунуты трубки, следует загерметизировать терма клеем, для того чтобы вода не попадала туда.


Сняв оси с пропеллерами, следует промазать какой-либо смазкой трубки, где они стоят. Если не смазывать то в трущихся местах будет сильный нагрев, что приведёт, к расширению метала, увеличению сопротивления, что в свою очередь может повлиять на нагрузку электронной системы лодки.

Припаиваем провода к электродвигателям. А провода от электродвигателей припаиваем к плате управления вертолета, где были припаяны вертолётные двигатели. Про полярность не сказать не чего, она подбирается методом тыка. Главное чтобы после включения при добавлении газа электродвигатели вращались в противоположные стороны, а лодка двигалась вперёд. А при повороте на право, левый двигатель добавлял обороты, а левый сбавлял.
Приклеиваем аккумулятор к корпусу терма клеем. Вырезав квадратик из используемого материала, приклеим и его с помощью терма клея к плате управления и этот бутерброд нужно приклеить также к корпусу.
Изготовим крышу для лодки, повторяя действия по пошаговым фото. И украсим лодку тем, что у вас есть.
Радиоуправляемый катер для рыбалки — это настоящая находка, которую может соорудить любой мастер собственными руками. С его помощью осуществляется завоз прикормки на дальние расстояния. Купить такое изделие можно в специализированном магазине, но уже после нескольких походов на рыбалку оно сломается. Естественно, есть очень качественные модели, но их стоимость тоже впечатляет. Лучше соорудить катер на радиоуправлении самостоятельно, так можно быть уверенным в его исправности, да и запчастей понадобится немного.
Нельзя сказать, что собрать такое небольшое судно очень уж просто. Но если соблюдать инструкцию, то для изготовления самоделки понадобится всего день.
Для начала следует собрать необходимый материал и инструмент:
- стеклопластик, фанера или другой материал, из которого можно будет вырезать корпус кораблика;
- силовой каркас из алюминиевого профиля;
- горячий клей (или другое средство для фиксации частей, которое будет устойчивым к воздействию воды);
- монтажная пена;
- двигатель;
- регуляторы;
- аппаратура для осуществления управления корабликом;
- аккумулятор, благодаря которому будет работать моторчик;
- провода и разъемы для подключения и соединения всех компонентов схемы;
- паяльник;
- дейдвудная труба;
- вал с винтом, благодаря которому будет осуществляться передвижение катера;
- ножовка или электролобзик.
Конструкция аппарата может быть абсолютно любой. Главное, чтобы она была действенной. Для этого важно правильно рассчитать водоизмещение этого маленького судна.
Вообще, такая небольшая лодка считается настоящей находкой, ведь рыбаку не придется думать, как доставить прикормку на большое расстояние. Кроме того, к ней можно прикрепить эхолот и обследовать водоем в поисках наиболее рыбного места.
Радиоуправляемый кораблик для рыбалки своими руками сделать нетрудно, нужно просто соблюдать последовательность выполнения работ:
- Изготовление корпуса. Если используется фанера, то дополнительно придется облицевать ее стеклотканью и обмазать эпоксидной смолой. Это поможет защитить материал от гниения. Вырезать фанеру или стеклопластик необходимо по предварительно нарисованной или скачанной схеме. Для того чтобы герметизировать все швы, необходима монтажная пена.
- Установка силового каркаса. Благодаря ему нагрузка на корпус распределяется равномерно, и он остается на плаву. Нос кораблика можно заполнить пеной, которая гарантирует его непотопляемость.
- Монтаж трубы с винтом. Лопасти движущего компонента остаются внутри корпуса, поэтому они не запутаются в водорослях, не поранят рыбу, а также не зацепятся за корягу. Отверстие трубы дополнительно нужно закрыть решеткой.
- Обустройство электронной части. Вот теперь устанавливается двигатель, дейдвудная труба, вал с муфтой и гребной винт. Чтобы рыболовный катер мог плыть в заданном направлении и поворачиваться, нужно оснастить его регуляторами.
- Монтаж серводвигателей для открывания емкостей с прикормкой. Они должны находиться в корпусах, внутрь которых не попадает пыль и влага.
- Установка аккумуляторов.
Для управления изделием лучше выбрать пятиканальную радиосистему, которая устанавливается на игрушки.

Как видно, кораблик для рыбалки своими руками делается быстро.
Кроме того, есть другие полезные рекомендации, которые помогут не только самостоятельно сконструировать изделие, но и сделать его долговечным:
- лучше выбрать не фанеру, а стеклопластик, ведь он гораздо легче и не требует дополнительной защиты от влаги, так как не поддается ее негативному воздействию (этот материал также отличается высокой прочностью);
- выбранный аккумулятор должен обладать достаточной емкостью, чтобы катер не заглох посреди водоема, но также важно обратить внимание и на вес компонента (он не должен слишком сильно утяжелять конструкцию);
- катер можно дополнительно оснастить подсветкой, навигатором — это даст возможность осуществлять ночную ловлю;
- для того чтобы изделие не ушло под воду, необходимо правильно рассчитать водоизмещение, которое колеблется в пределах 2,5-12 литров (тут влияет расстояние, на которое уплывает судно, количество подкормки, масса необходимого оборудования).
Ловля рыбы при помощи радиоуправляемого катера — настоящее удовольствие. Но чтобы кораблик уплывал на дальние расстояния, система управления должна быть рассчитана на это. Радиус ее действия не должен быть меньше 50 м.
Как сделать гоночную лодку на радиоуправлении своими руками
Всем доброго времени суток дорогие друзья! В сегодняшней статье я бы вам хотел вам показать, как сделать лодку на радиоуправлении. Эта самоделка отлично подойдет для тех, кто хочет заняться лодочным моделизмом, но модели лодок стоят довольно дорого. Собрать свою модель будет не намного дешевле, но куда интереснее, чем просто купить готовую лодку в магазине. Ну да ладно, хватит длинных предисловий, погнали!
И так, для данной самоделки нам понадобится:
– лист ABS пластика.
– электродвигатели 180 класса 2шт.
– лодочные пропеллеры.
– переходник для вала электродвигателя.
– электроды подходящего диаметра.
– алюминиевые трубки, внутренний диаметр которых равен внешнему диаметру электродов.
– 2s 7.4v Lipo аккумулятор.
– немного провода.
– электроника от старого радиоуправляемого вертолёта.
– алюминиевая пластина.
– винты.
Из инструментов нам также понадобится:
– Линейка.
– маркер.
– канцелярский нож.
– терма клей.
– дрель.
– отвёртка.
– плоскогубцы.
– смазка.
– паяльник.
Для начала нам потребуется сделать корпус самой лодки. В качестве материала для корпуса лучше всего взять толстые листы ABS пластика. На листе пластика при помощи линейки и маркера следует отметить прямоугольник длиной 25см и шириной 11.5см.
После того как прикинули размеры на листе пластика, следует поделить верхнюю часть на прямоугольники, так как это показано на фото ниже. Это нужно для того чтобы более симметрично начертить нос нашей лодки. И пытаемся как можно точнее сделать нос лодки, но если у вас не получится, то можно скачать и распечатать фотошаблонов в интернете.


С помощью канцелярского ножа отрезаем прямоугольник и отрезаем от прямоугольника лишнее. Так чтобы у нас получилось, что то похожее на лодку. Затем тем же канцелярским ножом делим нашу заготовку пополам.
Канцелярским ножом срезаем угол на заготовках, которые только что получили. Это нужно для того, чтобы их можно было максимально плотно склеить под углом.

Затем срезаем две заготовки так, чтобы у вас получилось, так как на фото ниже.
Наносим терма клей на заготовки и склеиваем их между собой. Из того же пластика следует вырезать две заготовки похожие на трёх угольники. И приклеиваем их к лодке для того чтобы усилить корпус. На протяжение всей сборки корпуса старайтесь не жалеть терма клей и проклеивать все очень хорошо, это нужно для герметичности всей конструкции.
Наносим терма клей на указанное место и сгибая пластик склеиваем два конца между собой.
Из используемого пластика следует вырезать две полоски такой шириной, чтобы они были не выше задней стенки. И приклеиваем на те места, что указаны на фото.
Для следующего шага нам нужно изготовить некую «мотораму» на которой будут крепиться электродвигатели. Для моторамы нам понадобится какая-нибудь металлическая пластина, автор самоделки решил вырезать её из алюминиевого профиля. Пластина должна помещаться в лодку так чтобы она там не болталась. На самой алюминиевой пластине следует высверлить два больших отверстия для валов электродвигателей и четыре маленьких для крепления электродвигателей.


Закрепляем электродвигатели на пластине. Крепиться электродвигатели к пластине будут при помощи винтового соединения. После чего на валы электродвигателей устанавливаем переходники.
Берём нашу мотораму с электродвигателями и приклеиваем её в заднюю часть лодки так, чтобы расстояние между задней стенкой и переходником составляло 1-2 см.


Для следующего шага нам понадобится электрод. Электрод в данной конструкции будет осью привода, для этого нам надо убрать изоляцию с электрода. Убирать изоляцию с электрода очень удобно пассатижами. После того как убрали изоляцию с электрода нужно проверить влезет ли он в заранее заготовленную трубку, если да, то продолжаем.
Взяв пассатижи, делим электрод на две одинаковые оси. Длина осей должна быть чуть больше трубок. Затем надеваем лодочные пропеллеры на оси так, чтобы крутились они в разные стороны, и через трубки вставляем их в лодку. Но перед тем как вставить оси в лодку, в задней стенке следует проколоть два отверстия для них.
Места, где были проделаны отверстия и просунуты трубки, следует загерметизировать терма клеем, для того чтобы вода не попадала туда.

Сняв оси с пропеллерами, следует промазать какой-либо смазкой трубки, где они стоят. Если не смазывать то в трущихся местах будет сильный нагрев, что приведёт, к расширению метала, увеличению сопротивления, что в свою очередь может повлиять на нагрузку электронной системы лодки.

Припаиваем провода к электродвигателям. А провода от электродвигателей припаиваем к плате управления вертолета, где были припаяны вертолётные двигатели. Про полярность не сказать не чего, она подбирается методом тыка. Главное чтобы после включения при добавлении газа электродвигатели вращались в противоположные стороны, а лодка двигалась вперёд. А при повороте на право, левый двигатель добавлял обороты, а левый сбавлял.
Приклеиваем аккумулятор к корпусу терма клеем. Вырезав квадратик из используемого материала, приклеим и его с помощью терма клея к плате управления и этот бутерброд нужно приклеить также к корпусу.
Изготовим крышу для лодки, повторяя действия по пошаговым фото. И украсим лодку тем, что у вас есть.


В крыше следует проделать прямоугольное отверстие для зарядки и ремонта. И с внутренней стороны следует приклеить не большие квадратики для того чтобы крышка не проваливалась вовнутрь.
Из используемого материала следует вырезать полозья для более стабильного и более управляемого движения. И приклеиваем их при помощи терма клея.
Все готово! В итоге у нас получилась очень интересная модель радиоуправляемой лодки. Лодка получилась очень быстрой и на удивление манёвренной. Данная самоделка наверняка понравится многим и многие обязательно захотят сделать себе такую же лодку.


Вот подробное видео от автора со сборкой и испытанием данной самоделки:
Ну и всем спасибо за внимание и удачи в будущих проектах самодельщики!
Источник

Доставка новых самоделок на почту
Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
usamodelkina.ru
Катер своими руками из «Моделиста конструктора» — Паркфлаер
Мое увлечение радиоуправляемыми моделями началось с постройки катера на радиоуправлении. Многим моделистам известен такой журнал как «Моделист конструктор». В одном из номеров за 198Х какой-то год я прочитал статью про спортивный катер и тоже захотел построить такой же. На страницах были приведены в масштабе необходимые чертежи. Вот что из этого получилось.
В связи с тем, что те годы прошлого столетия были достаточно тяжелые и для модели трудно было найти нужные детали, то все строилось из подручных материалов. Регуляторов и моторов вообще не было. Но буду последовательно вести рассказ.
В кружки и дом пионеров я не ходил, мастерил потихоньку дома. Про стеклоткань конечно слышал, но родители сказали это вредно и больше не обсуждается. Поэтому перевел все чертежи на толстый картон, нарезал на пенорезке кубиками пенопласт. Собрал шпангоуты вместе с пенопластом и прошелся пенорезкой.
Пенорезка была самодельная, между двух опор натянул нихромовую тоненькую проволоку, через которую пропускал ток от мощного 12 вольтового блока питания.
Далее все оклеил плотным картоном. Пропитал все лаком, предварительно открытые участки пенопласта покрыл ПВА, чтобы пенопласт не растворился. Шпангоут, где предполагался двигатель, сделал из стеклотекстолита. Корпус получился очень легким и достаточно прочным. Длина модели 800 мм, ширина 240 мм.
В качестве дейдвуда использовал алюминиевую трубку диаметром 10 мм, в которую после некоторых доработок напильником встали подшипники. В верхней части сделал масленку с пробкой под винт. В качестве вала использовал металлический пруток, на который нанес резьбу М4. В дейдвуд шприцем залил густое масло, от отцовской машины.

Киль сделал сам, к стержню припаял кусочек фольгированного стеклотекстолита. Также установил два подшипника для легкости хода.
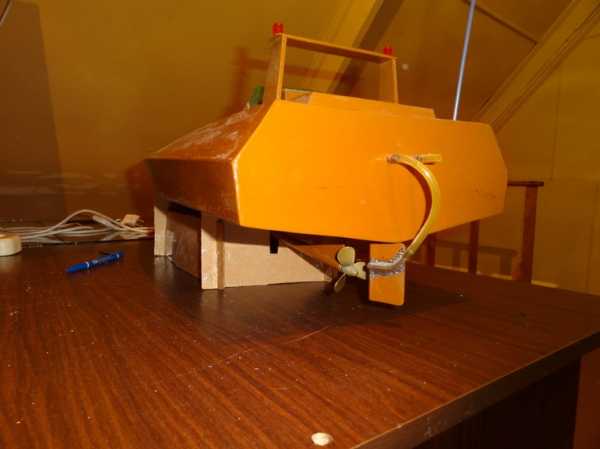
На день рождения родители подарили первую серьезную двухканальную аппаратуру пистолетного типа Acoms на 27MHz с встроенным BEC-ом и двумя стандартными сервоприводами.
Мотор был первоначально установлен низкооборотистый на 12v, его характеристики мне были не известны, но крутящий момент был не маленький.
Лючки сделал быстросъемными, с одной стороны задвигаются, а с другой – на винтовых соединениях.

Регулятор с реверсом сделал сам примитивно просто. Взял тумблер от старого прибора на три положения. Разобрал, ослабил пружину, просверлил в ручке отверстие и присоединил тягу от сервопривода. Настроил в аппаратуре расходы. Работает как часы, чистая механика. Конечно, можно поспорить относительно данного решения, но напомню, что это делалось много лет назад.
В качестве винта использовал самодельный из гнутого металла, но спустя некоторое время мне удалось купить винт из латуни, результат ошеломил. Диаметр винта 40 мм.
Далее было увлечение шоссейными машинками и после очередного тюнинга, появился коллекторный мотор Mabuchi 540, который я решил установить в лодку.
Переделок много не последовало, нужно было только состыковать валы. С этой задачей позволил справиться гибкий соединитель, до этого были и шестеренки, чтобы повысить обороты, и карданная передача.
Аккумулятор использовал от машинки NiMh 7,2 3000mAh.
Но радость от скоростных заплывов была недолгой. Вдалеке от берега из катера пошел дым.
Уже на берегу осмотр показал, что горят провода и сильно греется мотор. Такого я еще не видел ни разу.
Взамен поставил толстенные провода в силиконе, плюс ко всему решил сделать систему водяного охлаждения. Купил медную трубку в автомагазине от тормозной магистрали. Плотно накрутил на двигатель. В транце сделал ввод и вывод. На киль припаял кусочек трубки. Соединил все резиновой трубкой из того же автомагазина. Тесты в ванной показали работоспособность системы, вода нагнетается в систему охлаждения от гребного винта.

На высокой скорости стало заплескивать воду в катер, пришлось все лючки перед заплывами заклеивать липкой лентой. При смене аккумуляторов ленту приходится переклеивать на борт для повторного использования, поэтому появляются пятна от частичек клея липкой ленты. Периодически приходится чистить корпус лодки.
Каждым летом рассекаю по водным просторам.



С момента постройки и по сей день катер существует, изменений в конструкцию не вносил. Одним словом, радует глаз и навевает приятные воспоминания о проведенном времени.
www.parkflyer.ru
Катер на радиоуправлении

Продолжаем представлять вашему вниманию материалы по изготовлению радиоуправляемых игрушек. На этот раз предлагаем узнать способ самостоятельного изготовления радиоуправляемого катера.
Начнем, как всегда, с просмотра авторского видеоролика
Нам понадобится:
– 2 радиомодуля NRF24L01;
– 2 платы Arduino Uno;
– драйвер двигателя L298N;
– сервопривод;
– аналоговый джойстик для Arduino;
– 2 кнопки включения и выключения;
– двигатель на 6 вольт;
– кусок от жестяной банки;
– пластиковый корпус для джойстика;
– пластиковая герметичная тара для электроники;
– 2 пальчиковых аккумулятора;
– 2 отсека для аккумуляторов;
– велосипедная шпица;
– кусок пенопласта размером 26х15 см.
Первым делом необходимо придать пенопласту вид катера. Ножом вырезаем нос корабля.
Далее при помощи наждачной бумаги закругляем нижние углы.
В передней части катера нужно сделать несколько углублении. Углубление ближе к краю нужно для двигателя, среднее предназначено для герметичной тары, а заднее – для сервопривода.
Берем шпицу и распиливаем на двое.
Берем кусок пластмассы и проделываем в нем отверстие 2 мм сверлом.
Этот кусок пластмассы нужен для того, чтобы соединить вал двигателя и шпицу.
Далее из куска металлической банки нужно сделать винт.
Отрезаем кусок банки, надеваем его на шпице и зажимаем гайкой. Чтобы зажать лопасть гайку нужно предварительно спилить посередине.
Собираем механическую часть радиоуправляемого катера при помощи клеевого пистолета.
Ниже представляем схему передатчика катера.
А также приемника.
Теперь необходимо запрограммировать платы приемника и передатчика. Как сделать это, вы можете узнать из наших прошлых материалов по изготовлению самодельных радиоуправляемых игрушек. Как всегда, ссылки на скетчи и драйвера можно найти в конце статьи.
Важно надеть крышку на двигатель, чтобы на него не попадала вода. Отличным решением может стать крышка от аэрозольной краски или любого спрея.
Поворотную систему можно сделать из кусков пластмассы.
Наш катер на радиоуправлении готов покорять моря и океаны.
Ссылка на программу, необходимую для заливки скетча на плату: www.arduino.cc
Библиотека для джойстика: github.com
Драйвер, необходимый в случае использования китайской платы:
drayver-dlya-kitayskoy-arduino-na-chipe-ch440t-2.zip
[178.97 Kb] (скачиваний: 222)
Скетч для приемника
sketch_priemnik-korablik.rar
[1.46 Kb] (скачиваний: 519)
Скетч для передатчика
sketch_peredatchik-korablik-02.rar
[381 b] (скачиваний: 435)
Источник
Доставка новых самоделок на почту
Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
usamodelkina.ru
Собираем радиоуправляемый катер своими руками
О чем мечтают мужчины, которые уже имеют автомобили? Скорее всего, о собственном корабле или лодке, ну и возможно о личном самолете/вертолете! А что делать, если вы не обладаете такими финансами, что бы позволить купить себе такую роскошь? Выход есть – RC модель! По этой причине число энтузиастов растет с каждым днем.
Многие моделисты увлекающиеся радиоуправляемой техникой рано или поздно приходят к такому этапу, когда готовые модели становятся неинтересными. Как в этом случае разнообразить свое хобби? Очень просто – попробуйте собрать катер на радиоуправлении своими руками. Для реализации этой задумки мы вам предлагаем два варианта:
- Kit-наборы
- Собранные модели
- Сборка с нуля
Собрать полностью разобранный катер = построить его самостоятельно
 Комплекты для самостоятельной сборки (kit) являются как бы золотой серединой между полностью готовыми (RTR) моделями и теми, что можно изготовить по собственному желанию. Большинство необходимых деталей уже имеется в комплектации такого набора. Вам, возможно, потребуется вырезать запчасти, а может просто собрать воедино корпус радиоуправляемого катера своими руками. Не пугайтесь, подробная инструкция обязательно будет. В ней же указаны основные параметры недостающих деталей. Так как это набор для сборки, то электроники в коробке вы не найдете. Стоит внимательно ознакомиться с комплектацией набора, перед тем как совершать покупку. Вы должны знать, какие именно компоненты требуется приобрести дополнительно. Вы сможете самостоятельно выбрать и установить двигатель, сервомашинку, радиоаппаратуру и аккумулятор. Все эти запчасти и аксессуары имеются в наличие в нашем интренет-магазине «Micromodels».
Комплекты для самостоятельной сборки (kit) являются как бы золотой серединой между полностью готовыми (RTR) моделями и теми, что можно изготовить по собственному желанию. Большинство необходимых деталей уже имеется в комплектации такого набора. Вам, возможно, потребуется вырезать запчасти, а может просто собрать воедино корпус радиоуправляемого катера своими руками. Не пугайтесь, подробная инструкция обязательно будет. В ней же указаны основные параметры недостающих деталей. Так как это набор для сборки, то электроники в коробке вы не найдете. Стоит внимательно ознакомиться с комплектацией набора, перед тем как совершать покупку. Вы должны знать, какие именно компоненты требуется приобрести дополнительно. Вы сможете самостоятельно выбрать и установить двигатель, сервомашинку, радиоаппаратуру и аккумулятор. Все эти запчасти и аксессуары имеются в наличие в нашем интренет-магазине «Micromodels».
Также для постройки радиоуправляемой лодки своими руками независимо от того будете ли вы собирать катер с помощью специального набора или полностью самостоятельно, вам потребуется время. Ведь процесс создания очень увлекательный и не терпит торопливости.
Собери сам – вызов для асов!
Если даже Kit комплектация не вдохновляет вас, потому что вы профессионал, мы рекомендуем испытать свои силы в постройке модели катера на радиоуправлении своими руками с нуля. Для этого вам нужно хорошенько продумать, что в итоге вы хотите получить:
- Какими габаритами должен обладать корабль?
- Какой мотор вас устраивает (электро или ДВС)?
- Сколько каналов необходимо для аппаратуры управления?
- Нужен ли вам аккумулятор или же топливо?
- Где взять гребные винты, рули поворота, приводы и дейдвуды?
Вопросов на самом деле очень много, зная ответ на них, вы сэкономите свое время и нервы.
Несколько советов для капитанов
 Если вы собираете катер на радиоуправлении своими руками небольшого масштаба, тогда выбирайте лучше электродвижок. Уход за ним не тяжелый, и скорости около 40 км/ч вам хватит с головой. В этом случае и емкий аккумулятор поможет насладиться заплывами где-то на 15 минут. С таким судном можно даже детям поиграть. Представляете, как они будут гордиться тем, что их отец сам сделал радиоуправляемый катер своими руками! При сборке катера не забывайте о балласте, это одна из главных составляющих уверенного плавания.
Если вы собираете катер на радиоуправлении своими руками небольшого масштаба, тогда выбирайте лучше электродвижок. Уход за ним не тяжелый, и скорости около 40 км/ч вам хватит с головой. В этом случае и емкий аккумулятор поможет насладиться заплывами где-то на 15 минут. С таким судном можно даже детям поиграть. Представляете, как они будут гордиться тем, что их отец сам сделал радиоуправляемый катер своими руками! При сборке катера не забывайте о балласте, это одна из главных составляющих уверенного плавания.
Мечтали иметь габаритную лодку для соревнований, тогда остановитесь на двигателе внутреннего сгорания. Именно такие моторы установлены на всех спортивных катерах, которые буквально летают над водой со скоростью 75 км/ч. Однако за таким движком надо тщательно присматривать и проводить регулярное техническое обслуживание. В нашем ассортименте имеется прекрасный выбор заправочной жидкости для катеров и автомобилей. Обязательно посетите данный раздел. Что касается пульта дистанционного управления, то для электромоделей подойдет и двух канальный передатчик, а вот для лодок с ДВС лучше остановить свой выбор на 3-хканальной аппе. Эти “манипуляторы” представлены также в широком ассортименте нашего магазина. Лучшими претендентами по соотношению цена/качество выступают производители Spektrum и Futaba. Поэтому рекомендуем вам обратить на них внимание.
Что касается пульта дистанционного управления, то для электромоделей подойдет и двух канальный передатчик, а вот для лодок с ДВС лучше остановить свой выбор на 3-хканальной аппе. Эти “манипуляторы” представлены также в широком ассортименте нашего магазина. Лучшими претендентами по соотношению цена/качество выступают производители Spektrum и Futaba. Поэтому рекомендуем вам обратить на них внимание.
Многие бояться делать модели катеров на радиоуправлении своими руками, так как думают что это достаточно сложный процесс. Возможно и так. Но с нашей командой опытных специалистов вы смело можете рассчитывать на положительный результат. В случае возникновения трудностей позвоните нам, и мы обязательно вам поможем. Звоните, не стесняйтесь!
micromodels.ru
Как сделать радиоуправляемую катер своими руками
Катер на ру

Самодельные модели катера из дерева своими руками
Катер радиоуправляемый своими руками фото

Катера на радиоуправлении своими руками

Катер радиоуправляемый своими руками фото

Катер радиоуправляемый своими руками фото

Катер радиоуправляемый своими руками фото

Смотреть / RC сarp boat радиоуправляемый катер для рыбалки проба / WaterVideo.ru / видео онлайн в хорошем качестве

Радиоуправляемые катера — обзор моделей

pobedpix.com / радиоуправляемая лодка своими руками

Своими руками катер на радиоуправлении
Как сделать кораблик на радиоуправлении своими руками — AgaClip — Make Your Video Clips
pobedpix.com / радиоуправляемая лодка своими руками

Радиоуправляемый кораблик своими руками

Внешняя аккумулятор своими руками

Радиоуправляемый катер радиоуправляемый катер Mosquito RTR 7007
VRTP — RF — модули своими руками на частоту 423,2 МГц

Как сделать радиоуправляемый катер для доставки прикормки на рыбалке
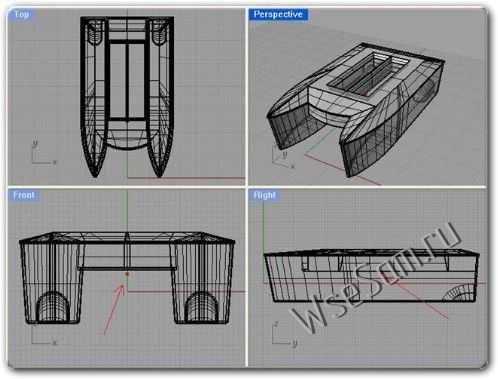
Как сделать игрушечную моторную лодку — Мульти регистрация

Модель Р/У 3827 Катер (Аккум, ЗУ, AAx8шт)

ppccabfiles.ru
Как сделать радиоуправляемый корабль своими руками

Лето – это самая жаркая пора, когда многие семейные люди выезжают на отдых к озеру. Чем же заняться детям, пока отдыхают родители, если купаться одним им строго запретили. Очень веселым занятием будет позапускать радиоуправляемый кораблик по глади лесного озера. Тем более, что сделать его самому достаточно просто.
В нашем видео вы можете посмотреть, как делается такой кораблик всего за 5 минут.
Для такой работы нам понадобится:
– пенаплекс;
– ножницы;
– бумага;
– карандаш;
– лобзиковая пилка;
– нож;
– термоклей;
– радиоуправляемая аппаратура.
В первую очередь на листе бумаги рисуем форму корпуса для нашего корабля. Следите за тем, чтобы правая и левая части были абсолютно симметричны. Одна часть корпуса должна быть заужена. Вырезаем нарисованный корпус.


Далее нам нужно эту выкройку будущего корпуса приложить к пенаплексу и обводим ее контур карандашом. После этого лобзиковой пилкой или пилкой по фигурному вырезанию выпиливаем наш корпус.
При помощи ножа делаем небольшие выемки для блока питания, который будет расположен в хвостовой части посредине. Поверх блока питания будет закрепленна аппаратура. А также для моторов слева и справа от блока питания.


Двигатели приклеиваем симметрично при помощи термоклея. В противном случае корабль постоянно будет отклоняться в какую-то одну сторону. Что значительно осложнит его управление. Таким же образом приклеиваем отсеки для батареек.


Аппаратуру используем от радиоуправляемого игрушечного самолета.
В передней части корпуса устанавливаем прямой кусок толстой проволоки в качестве мачты. При желании на нее можно повесить флаг или парус.


Старайтесь не направлять корабль в те места, где есть водоросли, он может застрять. Маленькие лопасти с ними просто не справляются, а просто наматывают их и прекращают крутиться.
Доставка новых самоделок на почту
Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
usamodelkina.ru