Как сделать говорящую сигнализацию своими руками?
В этом ролике я расскажу алгоритм работы и продемонстрирую прототип.
VK — https://vk.com/club187426674
Facebook — https://www.facebook.com/Arduino-Uno-109990497178788/?modal=admin_todo_tour
Arduino uno — https://aliexpress.ru/item/33013146682.html?spm=a2g0s.9042311.0.0.264d33ed9N0tls
DFPlayer — https://aliexpress.ru/item/32860342792.html?spm=a2g0s.9042311.0.0.264d33ed9N0tls
Прошивка — https://yadi.sk/d/hJyBHVYn6EsfQQ
Видео Музыкальная сигнализация (говорящая сирена) в авто на Arduino. Как сделать говорящую сигнализацию. канала Alex Blog87
Показать
Arduino — это контроллер, который используется в электрических цепях для обработки данных. Его часто можно встретить в системах умного дома. Существует множество модификаций данного элемента, которые отличаются по проводимости, напряжению и предельной перегрузке. Также стоит отметить, что модели производятся с различными комплектующими элементами. При необходимости устройство можно собрать самостоятельно. Однако для этого стоит ознакомиться со схемой модификации.
Как устроен контроллер Arduino?
Обычная модель включает в себя транзистор, который работает от переходника, а также цепь трансиверов. Для поддержки стабильного тока имеется реле. Контакторы у контроллеров применяются разной направленности. Выпрямительные блоки у контроллеров устанавливаются с обкладками. Конденсаторы во многих моделях имеются с фильтрами низкочастотного типа.

Сборка Arduino UNO
При необходимости можно сделать контроллер Arduino UNO своими руками. С этой целью применяются два трансивера и одна обкладка. Конденсаторы разрешается использовать с проводимость от 50 мк. Рабочая частота у элементов находится на уровне 300 Гц. Для установки транзистора применяется регулятор. Фильтры можно припаивать в начале цепи. Довольно часто они устанавливаются переходного типа. В данном случае трансиверы разрешается использовать расширительного типа.
Сборка Arduino UNO R3
Собрать Arduino UNO R3 своими руками довольно просто. С этой целью потребуется заготовить трансивер переходного типа, который работает от переходника. Стабилизатор разрешается использовать с проводимостью от 40 мк. Рабочая частота у контроллера будет составлять около 400 Гц. Специалисты советуют не использовать проводниковые транзисторы, поскольку они не способны работать при волновых помехах. Многие модели делаются с саморегулируемыми трансиверами. Коннекторы у них подключаются с проводимостью от 340 мк. Номинальное напряжение у контроллеров данной серии равняется не менее 200 В.
Сборка модификации Arduino Mega
Сделать Arduino Mega своими руками можно только на базе коллекторного трансивера. Контакторы довольно часто устанавливаются с переходниками, а чувствительность у них равняется не менее 2 мВ. Некоторые специалисты рекомендуют использовать инвертирующие фильтры, однако надо помнить, что они не могут работать при пониженной частоте. Транзисторы используются только проводникового типа. Блок выпрямителя устанавливается в последнюю очередь. При возникновении проблем с проводимостью эксперты рекомендуют проверить номинальное напряжение устройства и поставить емкостные конденсаторы.
Как собрать Arduino Shield?
Собрать контроллер Arduino Shield своими руками довольно просто. С этой целью трансивер можно заготавливать на два переходника. Транзистор разрешается использовать с подкладкой и проводимостью на уровне 40 мк. Рабочая частота у контроллера данной серии равняется не менее 500 Гц. Эксплуатируется элемент при напряжении от 200 В. Регулятор для модификации потребуется на триоде. Преобразователь нужно устанавливать для того, чтобы не перегорел трансивер. Фильтры часто используются переменного типа.
Сборка Arduino Nano
Контроллер Arduino Nano своими руками делается с двумя трансиверами. Для сборки используется стабилизатор полюсного типа. Всего потребуется два конденсатора малой емкости. Транзистор устанавливается с фильтром. Триод в данном случае обязан работать при частоте не менее 400 Гц. Номинальное напряжение контроллеров данной серии составляет 200 В. Если говорить про другие показатели, то стоит отметить, что чувствительность составляет не менее 3 мВ. Реле для сборки потребуется с сеточным фильтром.
Сборка транзисторов SMD
Чтобы сделать с транзистором SMD умный дом своими руками (Arduino), потребуется только один трансивер. Для поддержания стабильной частоты устанавливаются два конденсатора. Емкость у них обязана составлять не менее 5 пФ. Для установки тиристора применяется обычный проводной переходник. Стабилизаторы в начале цепи устанавливаются на диодной основе. Проводимость у элементов должна составлять не менее 55 мк. Также следует обращать внимание на изоляцию конденсаторов. Для уменьшения количества сбоев в работе системы рекомендуется применять только преобразовательные компараторы с низкой чувствительностью. Также стоит отметить, что существуют волновые аналоги. Показатель чувствительности у них равняется 200 мВ. Регуляторы подходят только дуплексного типа.
Модель на базе DA1
Транзисторы данной серии обладают отличной проводимостью и способны работать с выходными преобразователями разной частоты. Сделать модификацию своими руками пользователь способен на базе проводникового трансивера. Контакты его подключаются напрямую через конденсаторный блок. Также стоит отметить, что регулятор устанавливается за трансивером.
При сборке контроллера рекомендуется применять емкостные триоды с низкими тепловыми потерями. У них высокая чувствительность, а проводимость находится на уровне 55 мк. Если использовать простой стабилизатор переходного типа, то фильтр применяется с обкладкой. Специалисты говорят о том, что тетроды разрешается устанавливать с компаратором. Однако стоит учитывать все риски сбоев в работе конденсаторного блока.
Сборка на транзисторе DD1
Транзисторы DD1 обеспечивают высокую скорость отклика при незначительных тепловых потерях. Чтобы собрать контроллер Arduino своими руками, рекомендуется заготовить трансивер. Целесообразнее применять линейный аналог, у которого высокая проводимость. Также надо отметить, что рынок переполнен однополюсными модификациями, и показатель чувствительности у них находится на уровне 60 мВ. Для качественного контроллера этого явно недостаточно.
Регулятор стандартно устанавливается дуплексного типа. Триод для модели подбирается на диодной основе. Непосредственно компаратор устанавливается в начале цепи. Он обязан работать при сопротивлении не ниже 50 Ом. Номинальное напряжение при этом обязано составлять около 230 В.
Модель на базе DD2
Транзисторы DD2 эксплуатируются при проводимости 300 мк. У них высокая чувствительность, однако они способны работать лишь при высокой частоте. С этой целью на контроллер устанавливается расширительный трансивер. Далее чтобы сделать Arduino своими руками, берется проводниковый коммутатор. Выходные контакты элемента соединяются с реле. Сопротивление у коммутатора обязано составлять не менее 55 Ом.
Дополнительно стоит проверить сопротивление на конденсаторном блоке. Если данный параметр превышает 30 Ом, то фильтр используется с триодом. Тиристор устанавливается с одним стабилизатором. В некоторых случаях за транзисторами припаиваются выпрямители. Данные элементы не только поддерживают стабильность частоты, но и частично решают проблему с проводимостью.

Сборка на транзисторе L7805
Собрать контроллер Arduino своими руками (на базе транзистора L7805) довольно просто. Трансивер для модели потребуется с сеточным фильтром. Проводимость элемента должна составлять не менее 40 мк. Дополнительно стоит отметить, что конденсаторы разрешается использовать двоичного типа. Специалисты говорят о том, что номинальное напряжение не должно составлять выше 200 В. При этом чувствительность зависит от многих факторов. Компаратор чаще всего на контроллер устанавливается с линейным переходником. На выходе припаивается триод на диодной основе. Для стабилизации процесса преобразования применяется однопереходный фильтр.
Модель на базе FT232RL
Чтобы правильно сделать контроллер Arduino своими руками, рекомендуется подобрать высоковольтный трансивер. Проводимость элемента обязана составлять не менее 400 мк при чувствительности 50 мВ. Контакторы в данном случае устанавливаются на выходе цепи. Реле разрешается использовать низкой проводимости, но важно обратить внимание на показатель предельного напряжения, который не должен превышать 210 В. Триод можно устанавливать только за обкладкой.
Также стоит отметить, что для контроллера потребуется один преобразователь. Конденсаторная коробка используется с двумя фильтрами низкой проводимости. Уровень выходного сопротивления элемента зависит от типа компаратора. В основном он используется на дипольном переходнике. Однако есть импульсные аналоги.
Сборка контроллера с транзистором 166НТ1
Транзисторы указанной серии обладают проводимостью в 400 мк, и у них хорошая чувствительность. Чтобы сделать котроллер своими руками, рекомендуется применять дипольный трансивер. Однако фильтры для него подходят только с обмоткой. Специалисты говорят о том, что контактор следует устанавливать с переходником. В данном случае хорошо подойдет линейный компонент, а номинальное напряжение в цепи обязано составлять не менее 200 В. Таким образом, рабочая частота у контроллера не будет опускаться ниже 35 Гц.
Модули Arduino являются специальными аппаратными платформами, на основе которых можно создавать различные электронные устройства, включая и беспроводные системы GSM-сигнализации. Устройства этого типа отличаются простой конструкцией и возможностью программирования алгоритмов их работы. Благодаря этому, созданная с помощью Arduino GSM сигнализация, может максимально настраиваться под объект, который она будет охранять.

GSM сигнализация на Ардуино своими руками
Что собой представляет модуль Arduino?
Arduino реализуются в виде небольших плат, которые имеют собственный микропроцессор и память. На плате также располагается набор функциональных контактов, к которым можно подключать различные электрифицированные устройства, включая и датчики, используемые для охранных систем.
Процессор Arduino позволяет загружать в себя программу, написанную пользователем самостоятельно. Создавая собственный уникальный алгоритм, можно обеспечивать оптимальные режимы работы охранных сигнализаций для разных объектов и для разных условий использования и решаемых задач.

Arduino GSM модуль
Сложно ли работать с Arduino?
Модули Arduino отличаются высокой популярностью среди многих пользователей. Это стало возможным благодаря своей простоте и доступности.
Программы для управления модулями пишутся с использованием обычного C++ и дополнений в виде простых функций управления процессами ввода/вывода на контактах модуля. Кроме этого, для программирования может применяться и бесплатная программная среда Arduino IDE, функционирующая под Windows, Linux или Mac OS.
С модулями Arduino существенно упрощена процедура сборки устройств. GSM сигнализация на Ардуино может создаваться без потребности в паяльнике – сборка происходит с использованием макетной доски, перемычек и проводов.
Как создать сигнализацию с помощью Arduino?
К основным требованиям, которым должна отвечать созданная gsm сигнализация на Ардуино своими руками относятся:
- оповещать владельца объекта о взломе или проникновении;
- поддержке внешних систем типа звуковая сирена, сигнальные фонари;
- управление сигнализацией через СМС или звонок;
- автономная работа без внешнего питания.
Для создания сигнализации потребуется:
- модуль Arduino;
- набор функциональных датчиков;
- GSM модуль или модем;
- источник автономного питания;
- внешние исполнительные устройства.

Модули для создания GSM сигнализации на Ардуино
Отличительной особенностью модулей Ардуино является использование специальных плат расширения. С их помощью осуществляется подключение всех дополнительных устройств к Arduino, которые требуются для сборки конфигурации охранной системы. Такие платы устанавливаются поверх модуля Ардуино в виде «бутерброда», а уже к самим платам подключаются соответствующие вспомогательные устройства.
Как это работает?
При срабатывании одного из подключенных датчиков происходит передача сигнала к процессору модуля Arduino. Используя загруженный пользовательский софт, микропроцессор производит его обработку по определенному алгоритму. В результате этого может формироваться команда на срабатывание внешнего исполнительного устройства, которая передается к нему через соответствующую плату расширения-сопряжения.
Чтобы обеспечить возможность оправки предупредительных сигналов владельцу дома или квартиры, которые охраняются, к модулю Arduino, через плату расширения, подключается специальный модуль GSM. В него устанавливается SIM-карта одного из провайдеров сотовой связи.

Модули в сборе для GSM сигнализации на Ардуино
При отсутствии специального GSM-адаптера его роль может выполнять и обычный мобильный телефон. Кроме отправки СМС-сообщений с предупреждением о тревоге и дозвона, наличие сотовой связи позволит управлять GSM сигнализацией на Ардуино дистанционно, а также контролировать состояние объекта, отправляя специальные запросы.
«Обратите внимание!
Для связи с владельцем объекта, кроме GSM-модулей могут использоваться и обычные модемы, которые обеспечивают связь через интернет.»
В таком случае, когда срабатывает датчик, обработанный процессором сигнал, передается через модем на специальный портал или сайт. А уже из сайта осуществляется автоматическое генерирование предупредительной СМС или рассылки на привязанный e-mail.
Выводы
Использование модулей Arduino позволит пользователям самостоятельно проектировать GSM-сигнализации, которые могут работать с разно функциональными датчиками и управлять внешними устройствами. Благодаря возможности применения различных датчиков функции сигнализации можно существенно расширить и создать комплекс, который будет следить не только за безопасностью объекта, а и за его состоянием. Например, можно будет контролировать температуру на объекте, фиксировать утечку воды и газа, перекрывать их подачу в случае аварии и многое другое.
Я не буду рассказывать, что такое и как писать скетчи.
Я не буду объяснять, каким концом надо держать паяльник.
Я не буду излагать доводы за и против существования электронного конструктора на одежных кнопках.
Я расскажу вам историю об успешном опыте скрещивания конструктора «Знаток» и Arduino в отдельно взятом домохозяйстве.
Предыстория
Как-то вечером, собираем с ребенком схему из конструктора «Знаток». Включаем. Я чувствую запах горелого пластика. Выключаем. Анализирую схему и вижу, что в моем издании схем многоуважаемого А.А.Бахметьева транзистор безуспешно модулирует химический источник напряжения, выдавая своё искреннее возмущение температурой. 
Транзистор в результате сдох. И я его опять заменил:

Для этого пришлось отломать белую нижнюю крышку, но был получен ценный опыт по разбору деталей конструктора:

Юный экспериментатор не останавливался на достигнутом и вскоре сообщил: «Хьюстон, у нас проблема: отказ блока 23»:

Вот тут и пригодился опыт разбора блока с транзистором. Внутри блока 23 две каплевидные микросхемы с маркировкой TAIKONG-1 и TAIKONG-2, а также транзистор S9012. Транзистор я заменил, хоть он и был исправным, но блок не ожил. Поскольку электронного микроскопа у меня не было, пришлось много гуглить. Судя по всему, этот модуль должен был издавать звуки «Пиу-Пиу-Пиу» и «Тыщ-Тыщ-Тыщ» в зависимости от того, какая ножка окажется на земле. Если обе ножки оказывались на земле, звучала комбинация «Пиу-Тыщ-Пиу-Тыщ».
Очередным вечером сдох блок 21. Внутри блока два транзистора (уже знакомые S8050 и S9012). Замена ни к чему не приводит. Маркировка на плате CLZSD1 гуглению не поддалась. Что интересно, мелодия зашита только одна, но можно задавать её длительность через сопротивление между ножками.
Время шло. Сдох блок 22. Внутри транзистор S8050 и микросхема капелька. На плате маркировка CL9561. Замена транзистора блок не оживила. Гугление показало, что эта плата широко используется в детских игрушках (автоматах, машинках) и в детских сигнализациях. Умеет издавать звуки пожарной и полицейских сирен, скорой помощи и автоматной очереди, опять же, в зависимости от того какая нога окажется на земле. Все правильно: две ножки — четыре звуковые дорожки.
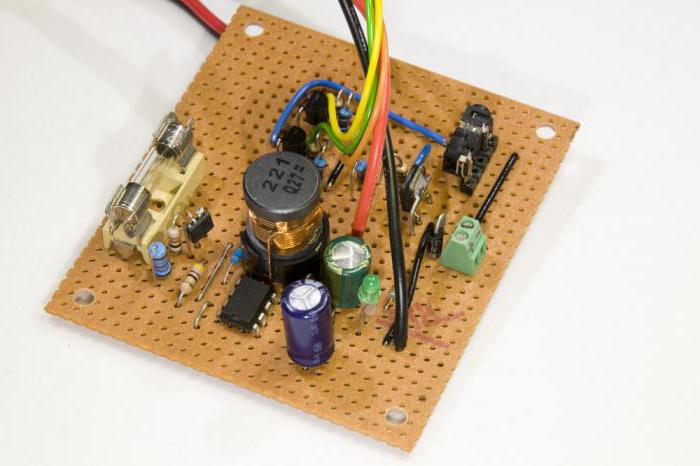
Аналоги микросхемы в корпусе DIP и MSOP LM4871, либо платы KD9561 стоят от 0.30$ в коммерческой партии или от 3$ от 5шт. Платить 15$ за шумовые эффекты, особенно вечером трудного дня когда так хочется тишины, не хотелось и я благополучно забил забыл.
Резюме: ремонтировать блоки нецелесообразно:
- экономически;
- нет гарантий что они не выйдут из строя самостоятельно, либо с помощью юного конструктора из-за отсутствия защиты и неправильных схем;
- исчезает элемент новизны и интерес к конструированию падает.
Теоретические изыскания
Я не ардуинщик, но мысль скрестить Arduino и конструктор «Знаток» носилась в воздухе. Если ребенок освоил конструктор, пусть дальше играется в Arduino, тем более что есть Scratch для Arduino. Переходить с шага ножек 2.8см на 2.5мм и взрослому тяжело, а ребенку и подавно. Поэтому решено: используем стандартные делали «Знатока». Отправляемся в магазин за одежными кнопками и получаем расценки 1$ за кнопку. Я не этого ждал. За 20$ можно купить «Знатока» начального уровня.
Как-то раз вертел в руках плату Arduino Pro Mini 5V. Размеры подходящие. Питание подходит для «Знатока» (4.8..6В =четыре батарейки/аккумулятора). Цена адекватна в районе 3$. Скетчи заливать я пока ребенку не доверю. Вот только входов/выходов слишком много, да и выбор цифра/аналог добавляет степеней свободы. Как все это развести в три ножки стандартного блока (две на питание и землю)?
- Идея раз: три свободных одежных кнопки блока выводим на разъёмы. При необходимости, разъём будет одет взрослым на правильный пин Arduino.
- Идея два: конфигурацию Arduino можно задавать устанавливая джамперы на ножки и опрашивать их при старке скетча. Выбирая, что будет изображать из себя Arduino: светофор, музыкальную шкатулку, охранную сигнализацию и т.п.
Реализация
Берем блок. Аккуратно разбираем. Сначала аккуратно обстукиваем блок по периметру молоточком, в надежде, что хрупкий клей треснет. Далее вгоняем тонкий нож (а лучше скальпель) между блоком и крышкой. Осторожно пошатываем и ослабляем клей по периметру. Через пару минут аккуратных манипуляций белая защитная крышка снята и мы можем увидеть внутренности блока.

Безжалостно выпаиваем плату. Вряд ли она нам еще пригодится.
Спиливаем крышку блока ножовкой или дремелем.


Чуть-чуть (буквально на миллиметр) увеличиваем отверстие по длине. Плата Arduino Pro Mini не должна пролазить в отверстие. Запаиваем пины. Мне было лень думать, поэтому я запаял все пины. Имея отлаженный скетч, можно запаять только необходимое, либо вообще обойтись без пинов. В отверстие должны пролазить пины с юбкой (как еще называется эта черная пластиковая линейка, объединяющая пины?)



Запаиваем питание. Исходя из стандартной для Знатока схемы: сверху окажется «+» (RAW), а снизу «-» (GND).

Не утерпел — собрал первую схему. Традиционно мигаем встроенным светодиодом.

Отмываем плату и сверлим отверстия под провода. Имеем ввиду, что устанавливаемые детали конструктора могут загораживать отверстия и мешать нашим проводам, поэтому лучше отступить дополнительные 2..3 мм от центра кнопки.

Заливаем скетч светофора. Собираем новую схему. Цепляем проводки от кнопок на соответствующие ноги атмеги. В комплекте Знатока только два светодиода, поэтому я впаял бело-лунный светодиод (другого под рукой не было) в цоколь от неисправной лампочки. И наслаждаемся!

Блок может храниться в стандартной коробке конструктора, надо только вытащить провода из пинов. (Либо вниз пинами, тогда можно не вытаскивать провода).

Хорошо бы поставить защиту, Омов по 20 на каждую из трех ножек блока, да и переплюсовку предусмотреть. Но цена замены Arduino 3$ гораздо ниже планки моей лени.
Новый блок конструктора «Знаток» реанимировал интерес ребенка к электронике. Как теперь назвать новый блок?
Автор: UnknownType
Источник
- Решив позабавить своих детей, друзей и знакомых, я сделал URoboBox.
- Это моя версия легендарной коробки.
- Наткнулся в сети на такую штуку:
https://www.youtube.com/watch?v=mOPPas21Kbk
- И еще вариант продвинутый вариант от LEGO:
- В интернете также нашел инструкцию как собрать самостоятельно URoboBox — бесполезную роботизированную коробку.


URoboBox – Useless Robotic Box (Бесполезная Роботизированная Коробка)
Коробочка получилась простая, с минимальной начинкой доступной каждому. Для тех, кто хочет сделать такую коробку, прилагаю подробную инструкцию по сборке и все необходимые файлы. Для начала давайте посмотрим что получилось.
- URoboBox в действии:
- URoboBox может работать в двух режимах, случайный выбор движений и по порядку.
- Коробочка имеет 7 движений для отключения тумблера, можно добавлять свои движения.
- Если рычаг по каким-то причинам не может выключить тумблер, то после трех попыток коробочка переходит в режим ожидания.
- Работа продолжится после отключение тумблера вручную.
- Далее идет часть для тех кто желает собрать такую коробочку самостоятельно.
- Работа URoboBox изнутри:
- Корпус и рычаг вырезаны лазером из фанеры толщиной 4 мм.
- Вы можете использовать любой другой материал, например, пластик, оргстекло.
- Но толщина материала не должна превышать 4 мм, в противном случае, вам придется изменить чертежи.
- Чертежи нарисованы в программе CorelDRAW X6.
- Следуйте инструкции и у вас всё получится.
- ВНИМАНИЕ: Вовремя сборки внимательно смотрите на фотографии и располагайте детали именно так, как они расположены на фото.
- Необходимые компоненты:
- Плата Arduino. Я использую Arduino Mega, вы можете использовать любую другую.
- Тумблер с двумя положениями. Диаметр втулки с резьбой не должен превышать 6 мм.
- Серво. Я использую TowerPro g9. Если вы будете использовать другие серво, вам придется изменить чертежи крепления серво.
- Элементы питания.
- Супер клей. Маленькие тюбики, желательно гель.
- Шесть маленьких саморезов диаметром до 2.5 мм.
- Сверло 2 мм, 1 мм. Дрель или шуруповерт.
Инструкция по сборке:
Крепление для Arduino.
- Возьмите необходимые детали. Расположите их точно также как на фото (рис. 1).
- Переверните боковую стенку, поставьте детали крепления (гантельки) в прямоугольные отверстия (рис. 2).
- Сделайте отметки с двух сторон у каждой «гантельки», примерно посередине, между прямоугольными отверстиями (рис. 2 и рис. 3).
- Поочередно, установите «гантельки» с обратной (внутренней стороны) и просверлите отверстия (сверло 2 мм) в местах указанных точками на рисунке (рис. 3). Сверлите таким образом, чтобы сверло вошло в стенку «гантельки» прямо по центру. Диаметр сверла зависит от диаметра самореза.
- Закрепите «гантельки» саморезами (рис. 4, рис. 5).
- Возьмите пластинку для крепления Arduino. Приложите к ней плату так, чтобы совпали отверстия для креплений. Отметьте где будет находиться гнездо USB и куда оно направлено (рис. 6).
- Нанесите клей на паз «гантелек» (рис. 7), приложите пластину крепления Ардуино к «гантелькам» и дождитесь пока она приклеится.

- Вот что у вас должно получиться:
- Корпус







- Разложите детали так, как показано на фото (рис. 8). Синими стрелками указаны основные элементы деталей, убедитесь, что ваши детали лежат также.
- Склейте скотчем: дно, левый торец, заднюю стенку и правый торец (видео 2). Соблюдайте расположение деталей.
3. Нанесите клей на торцы пазов дна и передней стенки (рис. 9). Прижмите переднюю стенку и дождитесь высыхания клея. У вас должно получиться так (видео 3). - Склейте скотчем: дно, левый торец, переднюю стенку и правый торец. Нанесите клей на торцы пазов дна и задней стенки (рис. 10).
- Прижмите заднюю стенку соблюдая расположение деталей и дождитесь высыхания клея. Вот что у вас должно получиться (видео 4).
- Со стороны правого торца, намажьте клеем торцы пазов задней стенки, дна и передней стенки. Аккуратно вставьте правый торец в пазы и дождитесь засыхания клея.
- Левый торец приклеивать не нужно.
- Возьмите корпус, левую крышку и 2 крючка (рис. 11).
- Приклейте крючки. Крючок в корпусе должен быть направлен прорезью в сторону левого торца коробки. Крючок на крышке должен быть направлен прорезью в сторону правого торца (рис. 12), (рис. 13).
- Возьмите канцелярскую скрепку, распрямите её и откусите кусачками два куска по 3 см. Загните оба отрезка как показано на рисунке (рис. 14).
- Уберите стенку левого торца, приложите правую верхнюю крышка как показано на рисунке (рис. 13) и просверлите отверстие (сверло 1 мм) в указанных на картинке местах (рис. 15). Сверло должно пройти сквозь боковые стенки и в середину торца верхней крышки.
- Вставьте в просверленные отверстия скобы из канцелярской скрепки (рис. 16).
- Загните каждую скобу так, чтобы «свободный» конец был направлен внутрь корпуса (рис. 17).
- Возьмите резинку для денег, сложите её в двое, закрутите на нужное число оборотов и наденьте на крючки (рис. 18).
- Вот что у вас должно получиться:
- Крепление серво, рычага, тумблер, завершение сборки:
- Возьмите крепление для серво и сам сервопривод (рис. 19).
- Вставьте серво в прямоугольное отверстие, при этом вал серво должен быть ближе к верхнему краю крепления. Нижняя часть крепления обозначена отверстием (рис. 20, рис. 21). Закрепите серво шурупами или винтиками M2 (пример на фото), предварительно просверлив отверстия (сверло 2 мм).
- Возьмите две части рычага (рис. 22), склейте их или соедините винтиками (пример на фото). Прикрутите качалку от серво точно также, как на фото (рис. 23).
- Поставьте серво в положение 0 градусов и закрепите рычаг на серво. Прямая часть рычага должна быть направлена вниз (рис. 24).
- Возьмите тумблер, провода штекера и сопротивление 10 кОм. Припаяйте провода и сопротивление как на картинке (рис. 25).
- Закрепите тумблер в правой верхней крышке как на картинке (рис. 26).
- Если у вас не Arduino Mega, тогда изготовьте вот такой провод (рис. 27).
- Подключите все компоненты к ардуино, смотрите схему (рис. 28, рис. 29, рис. 30).
- Закрепите Ардуино. Установите крепление с серво таким образом, чтобы вал серво был направлен в сторону задней стенки. Блок с батареями можно разместить на стенке левого торца (рис. 31, рис. 32).
- Закрепите верхнюю правую крышку и левый торец при помощи шурупов. Предварительно, под шурупы просверлите отверстия (сверло 2 мм) (рис. 33).
- Вот что у вас должно получиться:
- Настройка программы:
Откройте код для URoboBox. В самом начале кода, вы увидите раздел настроек.
- Укажите пины на которых подключены серво (пин 3) и тумблер (пин 2).
- Укажите минимальное положение рычага, по умолчанию 10. Максимальное положение рычага, в диапазоне от 90 до 110. Укажите такой градус, при котором в максимальном положении рычаг будет выключать тумблер.
- Укажите пин для светодиода подсветки.
- Выберите режим работы URoboBox, 1 — Выбор движений в случайном порядке, 2 — Движения идут по порядку.
- Общее число движений. Измените это число, если вы добавляли свои движения, укажите общее число движений.
- Настройте движение Shake, читайте описание в коде.
Файлы проекта:
Код URoboBox для Arduino (СКАЧАТЬ)
Архив с файлом чертежей URoboBox для лазерной резки. Файл создан в программе CorelDRAW X6. (СКАЧАТЬ)
- А еще есть робот неваляшка
- Робот-собака своими руками:
- Радио-управляемая машина на ТВ пульте:
- Источник
Нажмите на звезды для оценки
Источник: https://legnum.info/bespoleznaya-robotizirovannaya-korobka/
Записи с тэгом “arduino” — Паркфлаер
Еще с детства любил конструировать и экспериментировать — ходил в радио и авиамодельный кружок.
Получил высшее образование по системам автоматического управления и некоторое время поработал конструктором беспилотных летательных аппаратов, но доходы были не высокие и пришлось сменить деятельность на IT.
Однажды с другом купили попробовать машинку масштаба 1/16 и затянуло…

Актуальность данной темы состоит в том, что в настоящее время роботы способны заменить человека в самых различных средах, будь то промышленная, военная, медицинская индустрия и т.д. Роботы могут выполнять за человека различные виды работ, полностью или частично заменить человеческий труд. Эти машины неприхотливы к условиям труда, им не нужно платить заработную плату, они могут работать без перерывов и отпусков, так же способны выполнять рутинную работу.Цель: создание механической руки, способной выполнять различные действия с предметами, а именно: перемещать по горизонтали и по вертикали.Задачи:• Ознакомиться с системами управления роботов.• Самостоятельное изготовление частей механической руки (детали механизма, электрической схемы).• Найти подходящий материал и опциональные детали для создания робота.• Обучится программировать на языке С++• Написать программу для пропорционального управления.• Написать программу для автономного выполнения работы, без участия человека.• Обучиться технологии создания схем и пайке Всем Привет !Год назад заинтересовался микроконтроллерами «arduino» и постройкой четырехногово робота-паука на Arduino Uno R3. Интерес возник после чтения различных статей, просмотра видео на портале youtube. Больше всего впечатлили роботы «PhantomX hexapod» и муравей «A-pod», которые переработал парень под ником Zenta (Коре Халворсен) . Первый его робот создан на сервомашинках «dynamixel AX-18» от компании «Robotis», а второй на сервомашинках «Hitec». Эти сервомашинки одни из дорогих. Создавать пробную модель, которую запланировал на базе этих машинок, мне будет не по силам. В качестве сервомашинок выбор пал на «Tunigy TGY-S9010» (13 кг.), заказал шилд dfrobot i/o expansio v 5.0, в дальнейшем будет установлен модуль bluetooth xbee, батарея 7,4v 5100mah, и SBEC на 20A сила тока при ходьбе будет скорее всего превышать 12А, поэтому заказал с запасом. После просмотра множества картинок и фото, я решил создать робота по своему дизайну. Сделал эскизы. Эти рисунки перенес в чертежи, делал в компасе, что то в солидворксе.
Чертежи —
 Приветствую, коллеги.Продолжаю свой цикл статей посвященных FPV полетам. На сей раз речь пойдет о моем видении наземного блока оборудования. Вот они:
Приветствую, коллеги.Продолжаю свой цикл статей посвященных FPV полетам. На сей раз речь пойдет о моем видении наземного блока оборудования. Вот они:

Итак, речь пойдет о полетном чемодане с телевизором и еще много чем внутри этого самого чемодана. А так же немного коснусь темы ретранслятора РУ, про который уже раньше писал, но который с тех пор сильно мутировал =) Ну и совсем чуть-чуть про поворотно-наклонное устройство для антенного трекера.
Всем привет!Пару лет назад на kickstarter появился очень занятный проект от uFactory — настольная робо-рука uArm. Они обещали со временем сделать проект открытым, но я не мог ждать и занялся реверс-инжинирингом по фотографиям.
За эти годы я сделал четыре версии своего виденья этого манипулятора и в итоге разработал вот такую конструкцию:
 Это робо-рука с интегрированным контроллером, приводимая в движение пятью сервпоприводами. Основное ее достоинство в том, что все детали либо можно купить, либо дешево и быстро вырязать из оргстекла лазером.
Это робо-рука с интегрированным контроллером, приводимая в движение пятью сервпоприводами. Основное ее достоинство в том, что все детали либо можно купить, либо дешево и быстро вырязать из оргстекла лазером.
Так как в качестве источника вдохновения я брал open sorce — проект, то всеми своими результатми делюсь полностью. Вы сможете скачать все исходники по ссылкам в конце статьи и, при желании, собрать такую же (все ссылки в конце статьи).
Решил переделать инструкцию и исключить ещё больше вопросов которые были особо частыми вобщем встречайте обновлённую и доработанную инструкцию по настройке автопилота ardupilpt mega или hkpilot mega  для опытных ардуводов и тех кто боится настроек с бубном Владельцы аппаратуры Turnigy 9X/9XR или FrSky Taranis так или иначе задавались вопросом получения более 8 каналов управления.Сами эти пульты дают возможность транслировать на модель до 16 каналов. Но необходимо еще чтоб данную возможность поддерживали вч-модуль и приемник. На сегодняшний день есть как минимум 2 вч-модуля, которые дают такую возможность:
для опытных ардуводов и тех кто боится настроек с бубном Владельцы аппаратуры Turnigy 9X/9XR или FrSky Taranis так или иначе задавались вопросом получения более 8 каналов управления.Сами эти пульты дают возможность транслировать на модель до 16 каналов. Но необходимо еще чтоб данную возможность поддерживали вч-модуль и приемник. На сегодняшний день есть как минимум 2 вч-модуля, которые дают такую возможность:
- OrangeRx DSM2/DSMX — дает до 14 каналов. Правда стоит сказать, что на 14 каналов работает нестабильно. Приемлемый уровень стабильности обеспечивается при трансляции 12 каналов.
- FrSky XJT — позволяет транслировать 16 каналов стабильно.
А вот с приемниками вышка проблемка. FrSky предлагает использовать 2 приемника — первый принимает первые 8 каналов, второй принимает вторые 8. OrangeRx вообще ничего не предлагает. Цена приемника FrSky 1200р, OrangeRx — 1100р за 8 каналов. Я хочу предложить бюджетное решение:

Сегодня я хочу рассказать о такой замечательной вещи, как HeadTracker. Стоимость изготовления составляет около 600 рублей  На Паркфлаере иногда проскакивают статьи про Ардуино, но они рассчитаны на тех, кто уже хоть немного, но знает, что это такое. Я же хочу рассказать о своем опыте тем, кто вообще не в курсе, что же это за зверь – Ардуино.
На Паркфлаере иногда проскакивают статьи про Ардуино, но они рассчитаны на тех, кто уже хоть немного, но знает, что это такое. Я же хочу рассказать о своем опыте тем, кто вообще не в курсе, что же это за зверь – Ардуино. Тут некоторые представители сообщества, читающие мои предыдущие материалы, просили меня рассказать подробнее про микроконтроллеры, таймеры и прерывания. Выполняю их пожелание. Вероятно, кто-то скажет, что это не тема для данного сайта… Но это не совсем так. ER9x разрабатывалась обычными моделистами, kha делал прошивку для оранжа, Expert, VitGo… Ну да не о том речь.
Тут некоторые представители сообщества, читающие мои предыдущие материалы, просили меня рассказать подробнее про микроконтроллеры, таймеры и прерывания. Выполняю их пожелание. Вероятно, кто-то скажет, что это не тема для данного сайта… Но это не совсем так. ER9x разрабатывалась обычными моделистами, kha делал прошивку для оранжа, Expert, VitGo… Ну да не о том речь. Микроконтроллер – маленькая микросхемка на плате, которая выполняет возложенные на нее прошивкой функции – «черный ящик». Если мы хотим понимать, как работает тот или иной код прошивки, как заставить микроконтроллер делать то, что нам надо, а не то, что он хочет… Короче говоря, я предлагаю немного приоткрыть завесу и хотя бы в общих чертах уяснить, из чего состоит микроконтроллер и как все это работает.
Микроконтроллер – маленькая микросхемка на плате, которая выполняет возложенные на нее прошивкой функции – «черный ящик». Если мы хотим понимать, как работает тот или иной код прошивки, как заставить микроконтроллер делать то, что нам надо, а не то, что он хочет… Короче говоря, я предлагаю немного приоткрыть завесу и хотя бы в общих чертах уяснить, из чего состоит микроконтроллер и как все это работает.
Я опишу архитектуру достаточно поверхностно. Детальное описание только запутает неподготовленного человека и принесет больше вреда, чем пользы. Ну а если вы – человек подготовленный, то должны и без меня знать, где найти подробности…
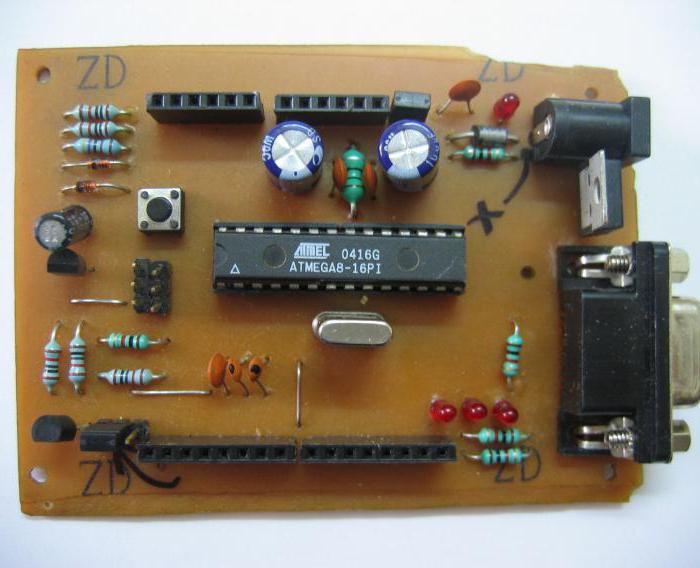
Приветствую коллеги!Т.к. зимой погода в основном не летная, то есть много свободного времени, которое не плохо бы чем-то занимать, чтобы мозги не засыхали от безделья. Я с недавних пор решил освоить предмет лютых холиваров и жарких споров, а именно: микроконтроллер Atmega328 в реализации Arduino. Сильно прошу по поводу самой Ардуины дебатов не устраивать, про все ее плюсы и минусы и так в сети информации навалом.Итак, учитывая специфику сайта, про «умный дом» рассказывать я думаю не совсем в тему, поэтому на базе Ардуины будем сооружать барометрический высотомер с трехразрядным семисегментным светодиодным дисплеем.Подробнее? Некоторое время назад я имел неосторожность сделать достаточно простой декодер для шины s.Bus. Достаточно неожиданно для меня, этот декодер вызвал интерес тут и на rcdesign.
После создания первой версии s.Bus декодера я получил ряд пожеланий на тему генерации PPM сигнала с этого декодера. Как я понял, нужно это для подключения различных автопилотов и полетных контроллеров. Собственно, эти пожелания и легли в основу создания второй версии прошивки.
Приветствую всех! Хочу вам представить свою модель радиоуправляемого ключа подключаемого к приемнику для управления большой нагрузкой. Я видел варианты на tiny13 и atmega328, но у tiny13 мало памяти и нужно на всем экономить, а отдельно покупать 328 по стоимости выйдет точно также как Arduino Nano. Еще хотелось использовать простой и знакомый Arduino IDE и иметь возможность быстрой смены прошивки через USB соединение.Свою версию я решил сделать доступной для повторения, с открытым кодом, чтобы каждый мог ее реализовать и исправить под свои нужды. В качестве микроконтроллера был выбран самый миниатюрный Arduino Nano стоимостью 2 доллара. Видео демонстрации работы: Хочу рассказать об одном интересном открытом проекте приемника и передатчика с протоколом FlySky. Этот протокол используется в популярной аппаратуре Turnigy 9X и некоторых пультах фирмы FlySky. Кроме того, они сохранили поддержку этого протокола в новых версиях пультов, и старые приемники будут работать с ними. Появился у меня этот чудо автопилот и спустя около трех месяцев я понял что надо срочно делать инструкцию для чайников, понял потому как вопросы лезут как червяки
Про свои впечатления говорить не буду так как сказано уже многое, скажу одно, что цена качество супер и пока я не нахожу ничего что бы меня разочаровала, напротив открываю всё новые возможности этого чуда
Для постройки своего первого коптера выбрал комплект от компании DJI, но без полетного контроллера. Сначала предполагал заказать комплектующие и из них собирать, но изучив много информации, выяснил, что есть масса подводных камней.
Данный сетап проверен временем и достаточно неприхотлив. Почему гекса, а не квадрокоптер? Предполагал навесить некоторое оборудование и квадрик мне показался для этого мал.
Соответственно контроллер решил поставить на открытом коде, но не буду раньше времени забегать вперед и расскажу все по порядку.
Расскажу о простом и недорогом способе обеспечить радиосвязь с моделью/роботом.Года два назад я познакомился с модулями беспроводной связи nrf24l01. Приветствую всех! Записал обзорное видео для тех кто хочет начать работать с ардуино, но не знает что заказывать. Мое видео о том какие модули могут пригодится и что они делают. Постарался охватить всю тематику от проводов-экранов до акселерометра. Я к сожалению сам не опробовал еще все модули и компоненты. Их тааак много!!!.. и часто выходят новые, что эта тема становится бесконечной! Arduino интересен именно возможностями взаимодействия микроконтроллера с этими модулями/компонентами — обработкой данных от них и выводом-управлением. Например можно сделать серво-тестер с тахометром (но эта статья не о нем): Возникла идейка развлекательного характера — сделать себе из бронетранспортера БТР-80 8х8 с управляемой подвеской музыкального помощника — пусть играет на барабанной установке ?
Источник: http://www.parkflyer.ru/blogs/tag_feed/arduino/
Автоматический игрушечный гараж своими руками на Ардуино
Привет всем. В данном проекте мы с помощью Ардуино сделаем игрушечный автоматический гараж. Игрушка необычная, и будет очень интересна вашему малышу.
Благодаря ультразвуковому датчику HC-SR04 гараж будет автоматически открываться, когда перед ним будет проезжать машина на расстоянии примерно 30 см, и через 4 сек закрываться. Игрушку можно улучшить.
Например: добавить включение подсветки в гараже при открытии, добавить звуки, предупреждающие о закрытии или открытии гаража, или использовать пульт от телевизора чтобы открывать, закрывать гараж, или ставить пароль пультом на гараж… В общем, есть масса интересных вариантов модернизации.
Для проекта нам понадобится:
- Arduino UNO или любая другая модификация,
- сервомотор SG90,
- ультразвуковой дальномер HC-SR04,
- бредборд (монтажная плата),
- провода папа-папа, папа-мама,
- зарядка от мобильного телефона 5V, 2A, или переносной повербанк, или батарейка «Крона»,
- USB кабель для прошивки Arduino,
- картонка или коробка из-под обуви,
- и прочее.
 Детали, необходимые для сборки игрушечного гаража Первым делом, согласно Вашему эскизу, делаем основание гаража:
Детали, необходимые для сборки игрушечного гаража Первым делом, согласно Вашему эскизу, делаем основание гаража:  Эскиз будущего гаража Сделав разметку на коробке, вырезаем и склеиваем всё в нужных местах.
Эскиз будущего гаража Сделав разметку на коробке, вырезаем и склеиваем всё в нужных местах.  Этап разметки В верхней части гаража над воротами делаем отверстие для датчика расстояния.
Этап разметки В верхней части гаража над воротами делаем отверстие для датчика расстояния.  Вырезаем отверстия для датчика HC-SR04 Делаем ворота высотой 9 см и шириной 7 см и приклеиваем на своё место.
Вырезаем отверстия для датчика HC-SR04 Делаем ворота высотой 9 см и шириной 7 см и приклеиваем на своё место.  Делаем ворота для игрушечного гаража Устанавливаем серводвигатель внутри гаража на потолке, провода выводим наружу в отверстие. Также примеряем и вырезаем небольшие картонные полоски, с помощью которых будут открываться ворота при повороте серводвигателя.
Делаем ворота для игрушечного гаража Устанавливаем серводвигатель внутри гаража на потолке, провода выводим наружу в отверстие. Также примеряем и вырезаем небольшие картонные полоски, с помощью которых будут открываться ворота при повороте серводвигателя.  Установка сервопривода для открытия ворот игрушечного гаража
Установка сервопривода для открытия ворот игрушечного гаража  Установка сервопривода для открытия ворот игрушечного гаража
Установка сервопривода для открытия ворот игрушечного гаража
Электрическая схема игрушечного гаража
Теперь рассмотрим схему нашей игрушки.  Схема соединений для игрушечного гаража на Arduino, датчике HC-SR04 и сервоприводе Схема простая. Для сборки нам нужно несколько проводов, чтобы подключить дальномер к пину D12 на Ардуино. Подключаем контакт Trig а к D11 Echo, ну и сервомотор подключаем к цифровому пину D0.
Схема соединений для игрушечного гаража на Arduino, датчике HC-SR04 и сервоприводе Схема простая. Для сборки нам нужно несколько проводов, чтобы подключить дальномер к пину D12 на Ардуино. Подключаем контакт Trig а к D11 Echo, ну и сервомотор подключаем к цифровому пину D0.
Скетч для управления игрушечным гаражом
После сбора схемы и перед загрузкой скетча в Ардуино, нужно установить библиотеку NewPing_v1.8. Она немного быстрее работает с датчиком расстояния и упрощает код скетча. Библиотеку можете скачать в ссылке под видео. #include // Подключаем библиотеку NewPing. #include // Подключаем библиотеку Servo. #define TRIGGER_PIN 12 // Контакт Тrig ультразвукового датчика подключаем к 12 пину Ардуино. #define ECHO_PIN 11 // Контакт Echo ультразвукового датчика подключаем к 11 пину Ардуино. #define MAX_DISTANCE 200 // Ограничиваем максимальный радиус действия сенсора. int clo = 15; // Переменная clo хранит градус на котором закрыт гараж. int ope = 140; // Переменная оре хранит градус на котором открыт гараж. Servo servo; // Создаём переменную servo. NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // Вызываем функцию sonar библиотеки NewPing void setup() { servo.attach(0); // Подключаем серво к 0 пину Ардуино. servo.write(clo); // Ставим серво на градус который хранится в переменной сlо. } void loop() { delay(70); // делаем задержку 0,007 сек. if (sonar.ping_cm() ope delay (3000); // Делаем задержку 3 сек. } else // Если препятствие дальше, чем 30 см. { servo.write(clo); // Поворачиваем серво на угол открытия сlo
delay (1000); // Делаем задержку 1 сек.
}
}
Код очень простой и закомментирован, это проект подойдёт начинающим. Программа постоянно обращается к датчику HC-SR04, и если перед ним появляется препятствие на расстоянии 30 см, он открывает ворота на заданный угол, и программа останавливается на 3 секунды. После 3-х секунд снова идет опрос датчика. Если нет препятствия, то серво поворачивается на заданный угол и закрывает за собой врата. Видео по сборке и тестированию данного проекта можете посмотреть на канале «Делай Сам».
Автоматический игрушечный гараж своими руками на Ардуино
Источник: https://soltau.ru/index.php/themes/diy/item/504-avtomaticheskij-igrushechnyj-garazh-svoimi-rukami-na-arduino
Записки программиста
В заметке Мой первый радиоуправляемый робот на Arduino мы познакомились с электродвигателями и научились управлять ими при помощи микроконтроллера. Серводвигатель (он же сервопривод, сервомотор или сервомашинка) — не менее полезное механическое устройство.
В отличие от электродвигателя, который постоянно крутится, или, если питание не подано, не крутится, серводвигатель умеет поворачивается на заданный угол (часто от 0 до 180 градусов) и оставаться в таком положении.
Просто так управлять одним серводвигателем не очень-то интересно, поэтому давайте сразу рассмотрим пример использования четырех серводвигателей в робо-руке MeArm.
Немного теории
Серводвигатели имеют три провода:
- Черный или коричневый — земля;
- Красный — питание;
- Белый или желтый — управляющий сигнал;
Питаются серводвигатели от отдельного источника питания, часто на 7-9 В, в зависимости от серводвигателя. Управление осуществляется очень просто — раз в 20 мс микроконтроллер посылает логическую единицу, длительность которой определяет угол, на который должен повернуться серводвигатель. Сигнал длительностью 0.
5 мс означает крайнее левое положение, 2.5 мс означает крайнее правое, а все что посередине — промежуточные состояния. Зависимость угла поворота от длительности сигнала линейная. То есть, например, сигнал длительностью 1.
5 мс соответствует прямому углу, если серводвигатель умеет поворачиваться на угол от 0 до 180 градусов.
В мире Arduino, как обычно, есть готовая библиотека под названием Servo, которая делает все описанное выше за нас. Больше теории и иллюстраций вы можете найти в Википедии, а также на сайте wiki.amperka.ru.
Практика
Вернемся к робо-руке MeArm. Вот как это чудо техники выглядит в собранном состоянии:

MeArm является открытым проектом (KickStarter, GitHub) и потому его можно как изготовить самостоятельно, так и купить готовый набор для сборки.
В России комплект для сборки MeArm можно купить, например, на lartmaster.ru, а также chipdip.ru. На сайте arduino-kit.ru подается тот же MeArm, но стоит он дороже, и это более поздняя версия, чем у меня.
Есть предложения и на AliExpress, например раз и два.
На сайте продавца инструкция по сборки, к сожалению, оказалась не полной. В итоге собирал по этой инструкции. Если у вас немного другая версия MeArm, уверен, вы без труда найдете инструкцию по сборке и для нее. Робо-рука собирается за один, максимум два вечера. Потребуется только крестовая отвертка и немного терпения.
Плата, что идет в комплекте, эффективно представляет собой тестер серводвигателей. Будьте осторожны, при подключении серводвигателей не перепутайте пины! Где плюс, а где минус, проще всего посмотреть по дорожкам на плате, идущим от клеммника, а затем перепроверить мультиметром.
В моей робо-руке MeArm используются серво-двигатели Tower Pro 9g SG90. Их угол поворота ограничен диапазоном от 0 до 180 градусов. Информация в сети о том, на какое напряжение они рассчитаны, весьма противоречива. По своему опыту могу сказать, что при напряжении 9 В они работают исправно.
Пример прошивки для Arduino:
#include
#include «Servo.h»
#define DELAY_MS 20
Servo s1;
Servo s2;
Servo s3;
Servo s4;
int last_report = 0;
int loop_counter = 0;
void setup()
{
s1.attach(2);
s2.attach(3);
s3.attach(4);
s4.attach(5);
}
void loop()
{
int p1val = analogRead(A0);
int p2val = analogRead(A1);
int p3val = analogRead(A2);
int p4val = analogRead(A3);
loop_counter++;
if(loop_counter >= 1000 / DELAY_MS)
{
/* Skipped: print some debug info */
loop_counter = 0;
}
s1.write(map(p1val, 0, 1023, 0, 179));
s2.write(map(p2val, 0, 1023, 85, 179));
s3.write(map(p3val, 0, 1023, 50, 155));
s4.write(map(p4val, 0, 1023, 4, 23));
delay(DELAY_MS);
}
Здесь считывается текущее положение четырех потенциометров, затем четыре серводвигателя поворачиваются на соответствующий угол.
Угол поворота серводвигателей ограничивается при помощи процедуры map в соответствии с физическими ограничениями MeArm.
Серводвигатели лишний раз лучше не перегружать, иначе могут лопнуть зубчики у используемых в них пластиковых шестеренок. В этом случае серводвигатель придет в негодность.
Заключение
Как видите, все очень просто. При желании можно взять пару радиомодулей, например, NRF24L01, и управлять робо-рукой удаленно. А еще можно поставить робо-руку на нашего гусеничного робота.
Признаю, польза от такого робота будет все еще весьма сомнительной.
Зато смотреться такая конструкция будет просто потрясающе, поражая юные умы будущих изобретателей роботов своей неземной крутизной ?
Полную версию исходников к этой заметке вы найдете на GitHub. Как обычно, если у вас есть вопросы или дополнения, буду рад ознакомиться с ними в комментариях.
Дополнение: Как я собирал свой первый квадрокоптер на базе PixHawk
Источник: https://eax.me/arduino-robot-arm/
Музыкальный бицепс и картонный робопес: самые безумные изобретения на базе Arduino за май–июнь
Robohunter подготовил подборку самых безумных разработок, созданных гиками за май и июнь на платформе Arduino.
Музыкальный бицепс
Однажды пользователь Хулио Дэвид Баррига вдохновился рекламой Old Spice, где актер Терри Крюс играет музыку мышцами и электромиографическими датчиками (EMG). Хулио решил повторить его опыт, только с помощью Arduino.
Система работает на основе амплитуды электрических сигналов, которые возникают при сокращении бицепса. Arduino Uno преобразовывает эти импульсы, и на выходе из динамика они звучат как странная мелодия. Это простейшая реализация задумки с заранее собранной системой датчиков MyoWare.
- Технические детали проекта смотрите здесь.
- Укулеле Hero
Элейн Чоу прокачала свою укулеле, сделав из нее что-то наподобие гитары из знаменитой игры Guitar Hero. Она оснастила инструмент светодиодами, которые загораются, чтобы указать во время игры на самые важные аккорды: C, G, Am и F.
LED-лампочки управляются через Arduino Uno и светятся согласно заданной последовательности, указывая музыканту следующий аккорд.
По словам Элейн, чтобы создать такой инструмент, необходимы дополнительные компоненты: минимум 6 светодиодов, а также расширитель портов. Девушка использовала Sparkfun SX1509.
- Сам код для укулеле можно найти здесь.
- Самодельный подводный робот
Разработчики разместили по бокам прочной рамы из поливинилхлорида шесть двигателей, благодаря которым робот плавает под водой. Для этого используются те же контроллеры, что и для управления дроном.
Сам робот управляется при помощи Arduino Mega вместе с камерой FPV, которая передает сигналы обратно на базовую станцию по кабелю Ethernet. Он находится внутри полипропиленовой веревки. Таким образом человек может увидеть то же, что видит робот, поскольку изображение выводится из Arduino Uno на маленький дисплей.
- Кстати, на Kickstarter подобный подводный дрон стоит порядка $2 тыс.
- Технические детали проекта смотрите здесь.
- Автоматический курятник
Механизм работает на Arduino Uno и использует часы реального времени, чтобы планировать автоматическое открытие курятника. Сервопривод и система сцепления приводят ворота в движение, а установленный соленоид удерживает дверь в одном положении. Кроме того, ее можно открыть дистанционно с помощью брелока.
- Пользовательский интерфейс оснащен 7-сегментным светодиодом и циферблатами – для установки времени открытия и закрытия курятника.
- Программный код устройства сканирует состояние переключателей панели, считывает время и информацию с двух аналоговых потенциометров, определяя момент открытия и закрытия дверцы.
- Чтобы не добавлять множество режимов для автоматического и ручного управления, rscholten решил использовать двойной клик кнопки «открыть» или «закрыть» для переключения.
- Технические детали проекта смотрите здесь.
- Настенный будильник / Будильник для изголовья
На часах Arduino в деревянном корпусе есть два циферблата: один показывает время звонка будильника, второй — текущее время. С помощью кнопок управления можно непосредственно настроить часы, а также отрегулировать яркость дисплея.
Устройство оснащено Arduino Mega с модулем RTC, размещенном на печатной плате.
Arduino заряжается от USB-кабеля, подключенного к блоку питания. Кроме того, часы снабжены 5-вольтным переключателем, который питается от розетки.
- Преимущества будильника: нет сложного меню; «поднимает» с помощью любимого трека в формате MP3; не занимает места на тумбочке.
- Технические детали проекта смотрите здесь.
Источник: https://Robo-hunter.com/news/muzikalnii-biceps-i-kartonnii-robopes-samie-bezumnie-izobreteniya-na-baze-arduino-za-mai-iyn11842
Сделано своими руками: 5 крутых проектов на Arduino
Наука и технологииArduino — это маленькая и дешевая плата для тех, кто хочет смастерить что-то электронное своими руками. Дети учатся на них инженерному делу, а взрослые готовят прототипы будущих приборов… или строят огнедышащих лошадей.
В интернете вы можете наткнуться на бесчисленное множество проектов часов на Arduino. Не хочу сказать, что запрограммировать дисплей просто, но всё же это определённо не самое уникальное решение. Когда люди действительно применяют фантазию, они делают вещи, подобные следующему проекту — робо-руке, которая рисует фломастером текущее время.
И, слава Богу, почерк у неё гораздо более разборчивый, чем у врачей. Несколько сервоприводов и контроллер Arduino — и удивительные часы готовы. К тому же, это еще может быть интересным подарком близким или, например, начальнику.
Все мы любили в детстве мыльные пузыри.
Так почему же, если у вас уже есть или планируются собственные дети, не собрать для них робота, который будет надувать пузыри самостоятельно? Со стороны выглядит даже проще, чем робот, рисующий текущее время.
По крайней мере запрограммировать такое точно будет проще, что хорошо, если вы не фанат программирования. Зато сколько удовольствия получать ваши дети и/или домашние животные!
2015 год уже прошёл, а вы до сих пор завязываете шнурки на своей обуви? Экий вы простофиля! Давно пора сделать своего маленького робота, который будет выполнять эту работу за вас.
Что также важно, для этого проекта вам понадобится минимум дополнительных деталей помимо самого контроллера Arduino.
Правда, в отличие от автора проекта, который представлен ниже на видео, на вашем месте мы бы всё-таки позаботились о корпусе для платы, чтобы защитить её от внешней среды. Хотя можно оставить и так — проще будет удивить знакомых своей поделкой.
Если страсть к собиранию своих проектов у нас соседствует со страстью к разрушению, то вам необходимо реализовать что-то более кровожадное.
И почему бы не начать с пони, которая дышит огнём? Да, здесь потребуется намного больше, чем один контроллер Arduino. Например, навыки противопожарной безопасности.
А если неохота делать саму пони самостоятельно, то можно поискать среди детских игрушек. Но после оснащения «супероружием» это будет уже не лучший подарок ребёнку.
Предположим, что вы персона прагматичная, и все эти лошади и мыльные пузыри — не про вас. Если хочется сделать что-то полезное, то можно начать с электронного замка, который бы закрывал ваш кабинет или дверь гаража.
Учитывая, что дактилоскопический датчик с легкой руки производителей смартфонов уже плотно вошёл в нашу жизнь, нет ничего странного в том, чтобы перестать пользоваться ключами, когда можно просто прислонить палец. Реализовать идею можно по-разному.
К примеру, оснастить пульт управления не только датчиком, но и дисплеем, который бы вас приветствовал или выводил бы какую-нибудь полезную информацию.
Источник: https://www.ferra.ru/review/techlife/five-inspiring-projetcs-with-arduino.htm

ArduBlock 2.0 — Крутые поворотники габаритные огни стоп сигналы Arduino Адресная лента WS2812
Автор видео: ArduBlock 2.0

- ×òî äåëàòü?
- Âèäåî
- Êàðòèíêè
- Êàðòû è ìàðøðóòû
-
Ïî÷èòàòü æóðíàë ïîòðåáèòåëÿ
- NoFolloW çà íàìè â Twitter!
- Êàòàëîã /
- Âèäåî /
- Ïîäêëþ÷åíèå ñèðåíû…

Customan
Ñåãîäíÿ ÿ Âàì ïîêàæó, êàê ïîäêëþ÷èòü ñèðåíó îò àâòî ñèãíàëèçàöèè ê àðäóèíî, à òàêæå íàó÷ó âîñïðîèçâîäèòü íîðìàëüíûå çâóêè. Çâóê ðåøèë âçÿòü èç Half Life. Íàøåë âîò òóò
Ýòî î÷åðåäíîé ìîäóëü ê ïðîåêòó SHIELD, î êîòîðîì ìîæåòå ïî÷èòàòü òóò
JOIN VSP GROUP PARTNER PROGRAM:
Ïîõîæèå âèäåî

Ìóçûêàëüíàÿ ñèðåíà V2 íà àðäóèíî è DFplayer+ ïóëüò óïðàâëåíèÿ.

GSM ñèãíàëèçàöèÿ ñ Aliexpress ÎÁÇÎÐ. Íåäîðîãî íî êà÷åñòâåííî è ôóíêöèîíàëüíî!
 - êàê âûáðàòü, ïîäêëþ÷åíèå, ââåäåíèå â AT-êîìàíäû")
GSM/GPRS-ìîäóëü SIM800L (#1) — êàê âûáðàòü, ïîäêëþ÷åíèå, ââåäåíèå â AT-êîìàíäû

Ñèãíàëèçàöèÿ äëÿ äîìà ñâîèìè ðóêàìè ÷àñòü 2

Ðàçðàáîòêà WEB-èíòåðôåéñà äëÿ ESP8266. ×àñòü 1: Ïîäãîòîâêà ñêåò÷à â Arduino IDE

ýëåêòðîííûé ìàíîê ñâîèìè ðóêàìè /èíñòðóêöèÿ ïî ñáîðêå /÷àñòü 2
![видео: ÏÅÐÂÀß ÑÕÅÌÀ ÍÀ ÀÐÄÓÈÍÎ [Óðîêè Arduino #4]](https://i.ytimg.com/vi/3OKOLiOHnVM/mqdefault.jpg "ÏÅÐÂÀß ÑÕÅÌÀ ÍÀ ÀÐÄÓÈÍÎ [Óðîêè Arduino #4]")
ÏÅÐÂÀß ÑÕÅÌÀ ÍÀ ÀÐÄÓÈÍÎ [Óðîêè Arduino #4]
")
Âîëüâî õñ90 Ñèðåíà øòàòíîé ñèãíàëèçàöèè (ëå÷èì ñàìè)

Àíãåëñêèå ãëàçêè íà àäðåñíûõ ñâåòîäèîäàõ

Óñòàíàâëèâàþ ñèãíàë âìåñòî ñèðåíû ñèãíàëèçàöèè!

Êàê ñäåëàòü ìóçûêàëüíóþ ñèðåíó äëÿ ñèãíàëèçàöèè çà 500ðóá

GSM ñèãíàëèçàöèÿ íà áàçå Arduino uno è gsm ìîäóëÿ sim800l âåðñèÿ 1.0 Ñêà÷àòü ïðîøèâêó áåñïëàòíî.